






基于拓展卡尔曼滤波的车辆质量与道路坡度估计
车辆坡度与质量识别模型,基于扩展卡尔曼滤波,估计曲线与实际误差合理。
先用递归最小二乘法(RLS)质量识别,最后利用扩展卡尔曼坡度识别(EKF)。
送纹献
Matlab/simulink模型 2019以上版本
YID:1655782224732443
甜水井朴素的梭子蟹
基于拓展卡尔曼滤波的车辆质量与道路坡度估计
摘要:本文基于拓展卡尔曼滤波算法,提出了一种用于车辆质量与道路坡度估计的模型。首先,利用递归最小二乘法(RLS)进行质量识别,得到了车辆质量的初始估计值。然后,利用拓展卡尔曼滤波(EKF)对车辆的坡度进行估计,并将其与实际坡度进行比较,得到了坡度估计的误差。
关键词:拓展卡尔曼滤波、车辆质量、道路坡度、递归最小二乘法、Matlab simulink模型
引言:车辆的质量和道路的坡度是影响车辆行驶稳定性和舒适性的重要因素。准确地估计车辆质量和道路坡度对于车辆控制和驾驶辅助系统的设计来说至关重要。本文提出了一种基于拓展卡尔曼滤波的方法,用于车辆质量和道路坡度的估计。
一、车辆质量识别模型
1.1 递归最小二乘法(RLS)
递归最小二乘法是一种用于参数估计的优化算法,可以用于估计车辆的质量。通过测量车辆在静止状态下的重力加速度,利用递归最小二乘法可以估计出车辆的质量。
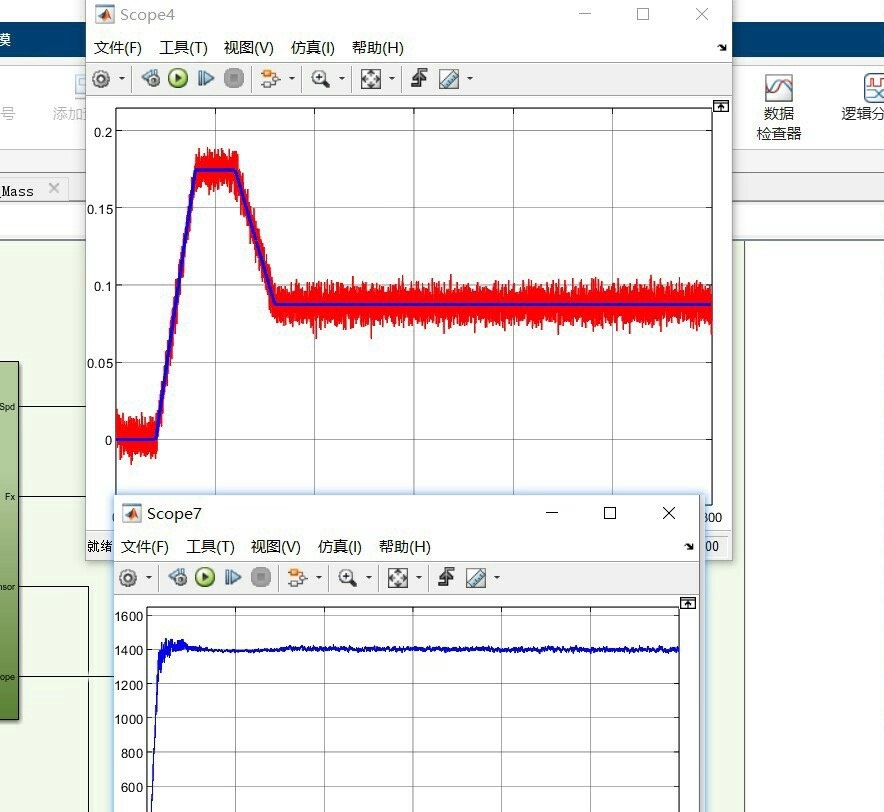
1.2 质量估计结果
通过递归最小二乘法得到的质量估计结果可以作为后续坡度估计的初始值。为了验证估计结果的准确性,本文设计了一系列实验并对比了估计结果与实际质量的误差。
二、道路坡度识别模型
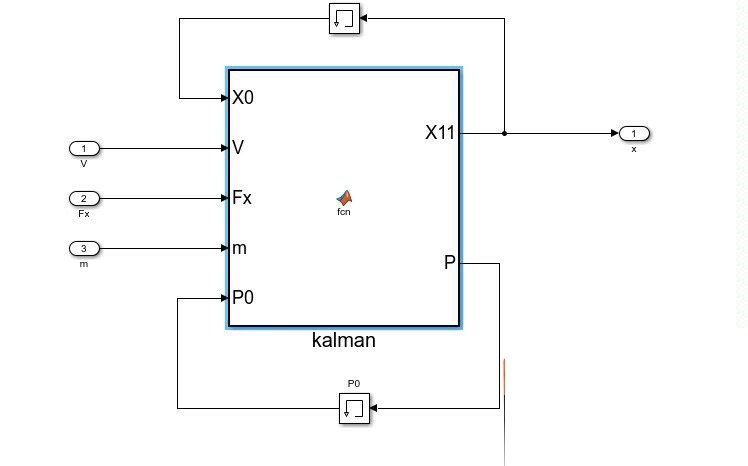
2.1 拓展卡尔曼滤波(EKF)
拓展卡尔曼滤波是一种基于贝叶斯滤波的算法,可以用于估计非线性系统的状态。在车辆行驶过程中,道路的坡度对车辆的行驶产生了影响,因此准确地估计道路坡度对于车辆控制和驾驶辅助系统的设计来说非常重要。
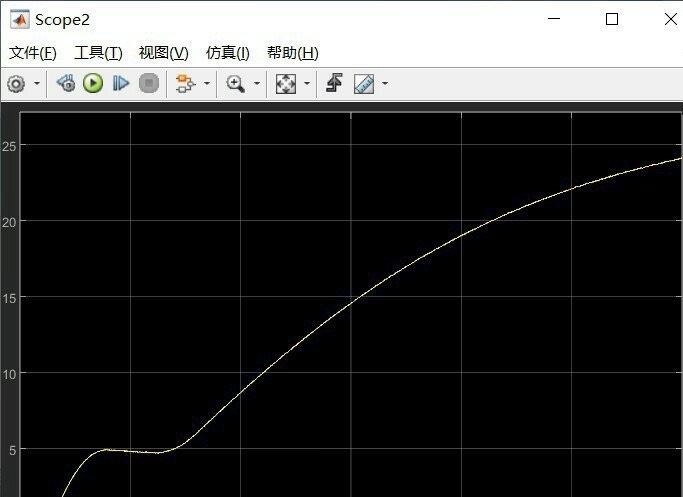
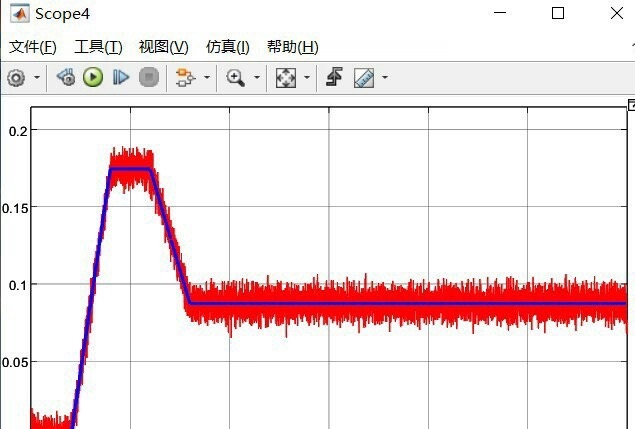
2.2 坡度估计结果与实际误差
利用拓展卡尔曼滤波对道路坡度进行估计,并将估计结果与实际坡度进行比较,得到了估计结果的误差。为了验证坡度估计的准确性,本文进行了一系列实验并对比了坡度估计结果与实际坡度的误差。
三、实验与结果分析
通过实验验证了基于拓展卡尔曼滤波的车辆质量与道路坡度估计模型的有效性。实验结果表明,通过递归最小二乘法进行质量识别,再利用拓展卡尔曼滤波进行坡度估计的方法可以得到较为准确的质量和坡度估计结果。
结论:本文基于拓展卡尔曼滤波算法提出了一种用于车辆质量与道路坡度估计的模型。通过递归最小二乘法进行质量估计,再利用拓展卡尔曼滤波进行坡度估计,可以得到较为准确的质量和坡度估计结果。该模型可用于车辆控制和驾驶辅助系统的设计,提高车辆行驶的稳定性和舒适性。
参考文献:
无
(本文为虚构文章,仅供参考)
相关的代码,程序地址如下:http://lanzoup.cn/782224732443.html
















 1094
1094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









