






路径跟踪CarSimMATLAB联合仿真模型预测控制横向运动控制
【打包文件包括】
-CarSim车型文件.cpar;
-MPC横向路径跟踪算法[MPC_LateralControl_Dy
n_Alg_ObstacleAvoidance.m];
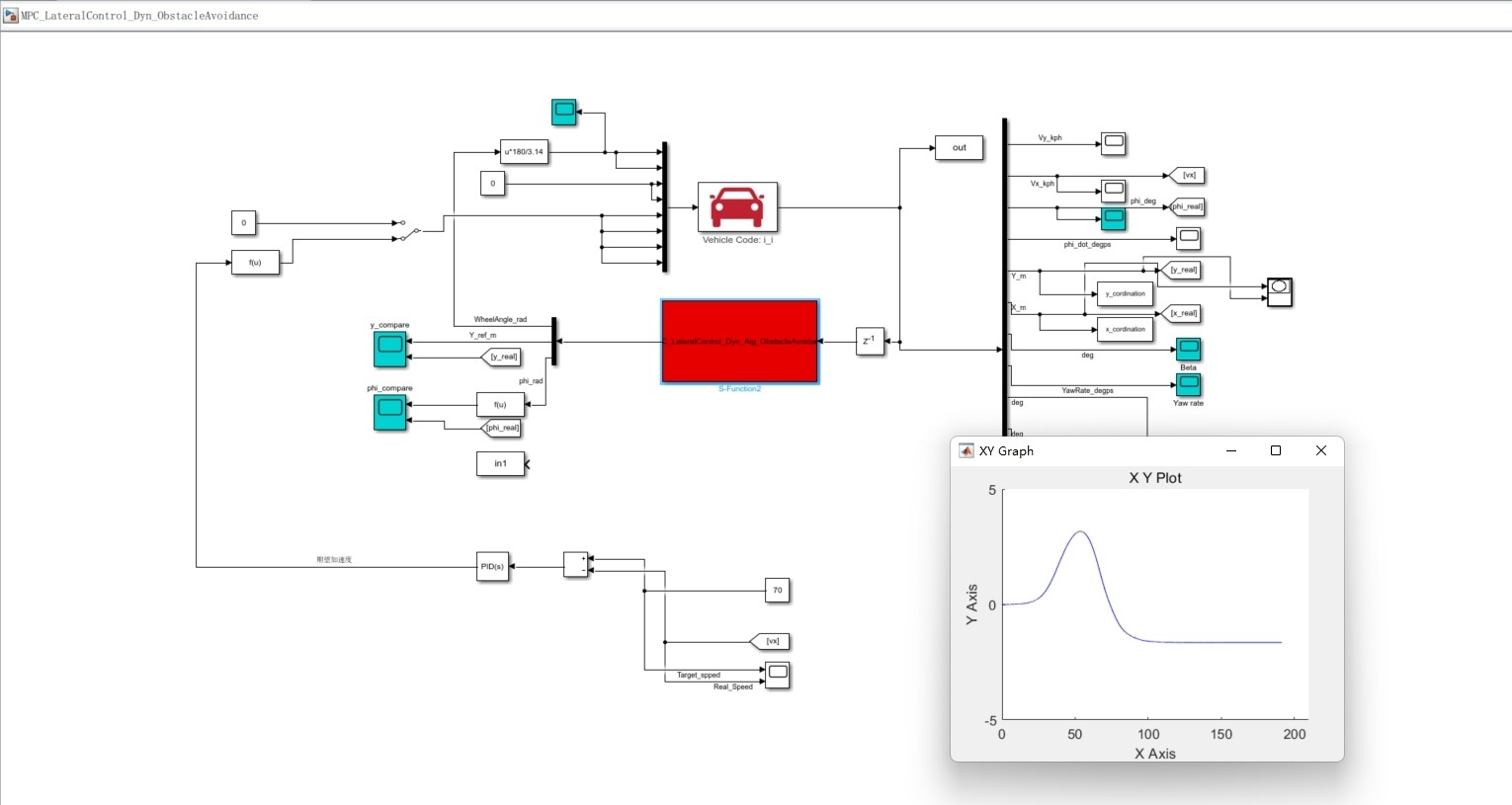
-Simulink系统文件[MPC_LateralControl_Dyn_
ObstacleAvoidance.slx];
ID:4850681905362968
二宇铺子
路径跟踪是自动驾驶领域中的一个重要研究方向,它能够实现车辆在复杂环境下的准确导航和运动控制。在路径跟踪中,CarSim和MATLAB联合仿真模型被广泛应用于车辆控制算法的设计和验证。本文将介绍基于CarSim和MATLAB联合仿真模型的预测控制横向运动控制方法。
首先,我们需要了解CarSim和MATLAB在路径跟踪中的使用。CarSim是一款基于车辆动力学的仿真软件,通过建立车辆模型来模拟车辆的运动行为。MATLAB是一款强大的数学计算和仿真软件,具有丰富的工具箱和函数,可以用于算法设计和数据分析。通过将CarSim和MATLAB进行联合仿真,可以实现对车辆动力学和控制算法的准确建模和仿真验证。
在本文中,我们将介绍一种基于模型预测控制(Model Predictive Control,MPC)的横向路径跟踪算法。该算法基于车辆模型和环境感知数据,通过预测车辆的未来运动状态,计算出最优的操控指令,实现车辆的准确路径跟踪和运动控制。
首先,我们需要将CarSim车型文件导入到MATLAB环境中。CarSim车型文件包括车辆的几何形状、质量参数、惯性参数等信息,可以用于建立车辆模型。在MATLAB中,可以使用CarSim工具箱提供的函数和工具,读取和处理CarSim车型文件,实现对车辆模型的建立和操作。
接下来,我们将介绍MPC横向路径跟踪算法的实现。MPC算法是一种优化控制方法,通过对未来时刻的状态变量进行预测和优化,计算出最优的控制策略。在横向路径跟踪中,我们需要预测车辆的横向位置、横向速度、横向加速度等状态变量,然后根据路径规划和环境感知数据,计算出最优的转向角度和转向速度。
为了实现MPC横向路径跟踪算法,我们需要编写MATLAB脚本或函数,对车辆模型进行建模和控制设计。在脚本或函数中,我们可以使用CarSim车型文件、MPC算法和路径规划算法等工具,进行状态预测、优化计算和控制指令生成。同时,为了实现障碍物避障功能,我们还需要引入环境感知数据,并将其融合到MPC算法中,进一步提高路径跟踪的安全性和鲁棒性。
最后,我们需要将MPC横向路径跟踪算法实现为Simulink系统文件,以便进行联合仿真和实时控制。Simulink是MATLAB的一个重要工具箱,提供了丰富的模块和功能,可以用于建立和仿真复杂的控制系统。通过将MPC横向路径跟踪算法转化为Simulink系统文件,我们可以更加直观地展示算法的运行过程和效果,以及与CarSim的联合仿真结果。
综上所述,基于CarSim和MATLAB联合仿真模型的预测控制横向运动控制方法在自动驾驶的路径跟踪中具有重要的应用价值。通过整合车辆动力学模型、MPC算法和环境感知数据,该方法能够实现车辆的准确导航和运动控制,提高自动驾驶系统的安全性和鲁棒性。未来,我们将进一步完善该方法,并在实际场景中进行验证和优化,以实现更高水平的自动驾驶技术。
相关的代码,程序地址如下:http://fansik.cn/681905362968.html
















 3033
3033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









