






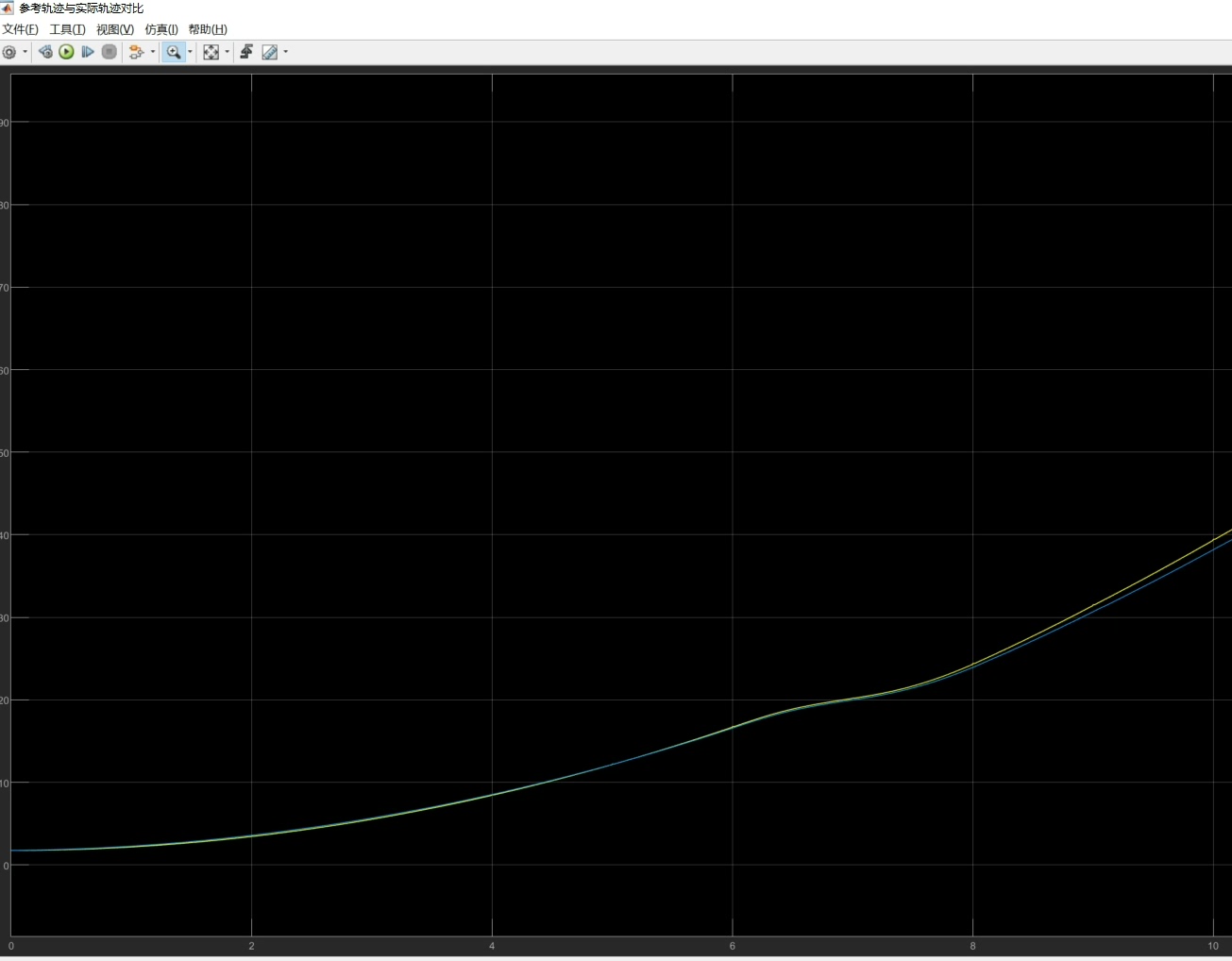
prescan,carsim,simulink三软件联合仿真,实现弯道超车,避撞前方机动车,使用frent坐标系下五次多项式规划加模型预测控制,有横向轨迹跟踪对比图,仿真图。
可包调试运行。
需要安装软件版本为,matlab2020b以上,carsim2020.0,prescan8.5。
ID:75200716116267718
熊大大哥哥
prescan、carsim和simulink是三款常用的仿真软件,在实现弯道超车和避免碰撞等汽车驾驶场景中十分有用。本文将介绍如何使用这三款软件进行联合仿真,并采用frent坐标系下的五次多项式规划加模型预测控制方法。
首先,我们需要安装以下软件版本:matlab2020b以上、carsim2020.0和prescan8.5。这些软件有着良好的兼容性,能够在联合仿真过程中有效配合使用。
在联合仿真中,prescan是一个强大的虚拟测试平台,能够模拟真实道路环境,包括道路结构、交通灯和其他车辆等。它还提供了丰富的道路场景设置和车辆参数调整功能,使我们能够根据实际需求对仿真场景进行灵活配置。
carsim是一款专业的车辆动力学仿真软件,它可以模拟车辆在不同驾驶场景下的运动和行为。通过精确建模车辆的动力学特性和控制系统,我们可以对弯道超车和避免碰撞等场景进行准确的仿真分析。
而simulink是matlab的一个强大工具箱,提供了可视化编程环境,可以方便地对复杂的系统进行建模和仿真。我们可以通过simulink搭建起整个控制系统的模型,并在仿真过程中实时调整参数,从而对系统的性能和稳定性进行评估。
在具体的仿真实验中,我们采用frent坐标系下的五次多项式规划加模型预测控制方法。这种方法主要通过规划车辆的横向轨迹,使其能够稳定地超越弯道和避免与前方机动车碰撞。通过对比不同的横向轨迹跟踪结果,我们可以评估不同控制策略的性能和稳定性。
仿真图是评估仿真结果的重要依据,它能够直观地展示车辆在不同场景下的运动轨迹和行为。通过详细分析仿真图,我们可以观察到车辆超车和避免碰撞的效果,并对控制算法进行进一步优化。
在整个仿真过程中,我们还可以进行调试运行,以确保软件和模型的稳定性和可靠性。通过逐步排查问题和调整参数,我们能够充分利用这三款软件的功能,获得准确的仿真结果。
综上所述,prescan、carsim和simulink三款软件的联合仿真能够有效实现弯道超车和避免碰撞等汽车驾驶场景的模拟。通过采用frent坐标系下的五次多项式规划加模型预测控制方法,我们能够得到准确的横向轨迹跟踪结果,并通过仿真图对控制算法进行评估和优化。调试运行过程中的问题排查和参数调整也能够提高仿真结果的准确性和可信度。以上就是本文对prescan、carsim和simulink三软件联合仿真的简要介绍,希望对读者有所帮助。
【相关代码,程序地址】:http://fansik.cn/716116267718.html
















 1870
1870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









