







文章目录
一、三种优先级的概念辨析
本篇文章将对下面三种优先级进行概念辨析:
- Cortex-M3 内核的中断优先级
- STM32F1XX 控制器的中断优先级
- FreeRTOS 的任务的优先级
1. 先理清楚两个概念:CPU 和 MPU
-
“CPU”:“Central Processing Unit”,即中央处理器。它是计算机系统中的主要组件,负责执行指令并进行数据处理和计算。CPU通常由控制单元、算术逻辑单元(ALU)和寄存器等部分组成。
-
“MPU:”“Microprocessor Unit”,微处理器单元。MPU通常用来指代一种单芯片的微处理器,它集成了处理器核心、内存、接口和其他外设等功能,常用于嵌入式系统和嵌入式设备。MPU可以被视为一种较小规模的计算机系统。
2. Cortex-M3 内核与 STM32F1XX 控制器有什么关系
先看看较为官方的解释:
Cortex-M3内核是一种由Arm公司设计的低功耗、高性能的32位RISC处理器内核。它具有较高的执行效率和能效,专门针对嵌入式系统设计。
STMicroelectronics的STM32F1系列是十分流行的Cortex-M3微控制器系列,提供了多个型号和配置选项,包括STM32F103、STM32F107等
简而言之,Cortex-M3 内核是 ARM 这个公司设计的一种 CPU 架构,而 STM32F1XX 控制器是 ST 公司在 CPU 上连接了片上外设、存储器、接口的一种 MPU,也就是 Cortex-M3 芯片。
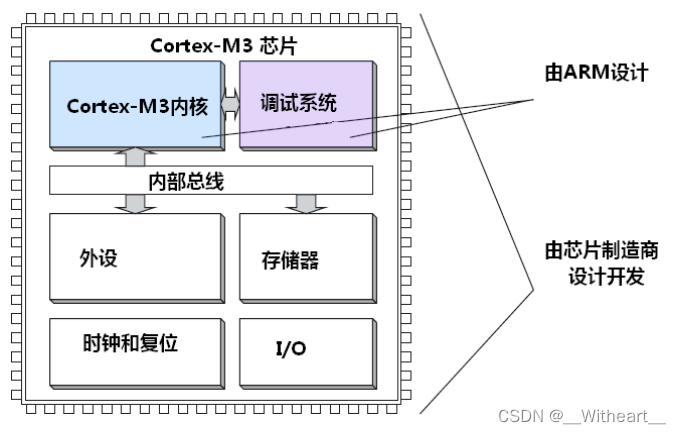
此图片来自《CM3 权威指南》一书。
3. 优先级的概念辨析
① Cortex-M3 内核和 STM32F1XX 的中断优先级
由于芯片制造商可以对 Cortex-M3 内核进行裁剪(只使用 Cortex-M3 的一部分),所以在内核方面, STM32F1XX 芯片实际上使用了完整的 Cortex-M3 内核的一部分。
所以这两者的优先级是相通的。(注意我使用的是“相通”,而不是“相同”,这意味着 STM32F1XX 芯片的各种设置可以在 Cortex-M3 架构的规定下由芯片厂商灵活自行设计)
② FreeRTOS 的任务的优先级
FreeRTOS 是运行于 STM32 芯片上的操作系统,其任务的优先级决定了设置的各类任务的执行顺序,是任务之间的优先级。
任务之间的优先级限制于 FreeRTOS 框架内,而 FreeRTOS 内核又被限制于 STM32 框架上。
二、 Cortex-M3 内核的中断优先级
(注:以下混合使用“中断”和“异常”这俩个术语,意思一致)
1. 中断编号
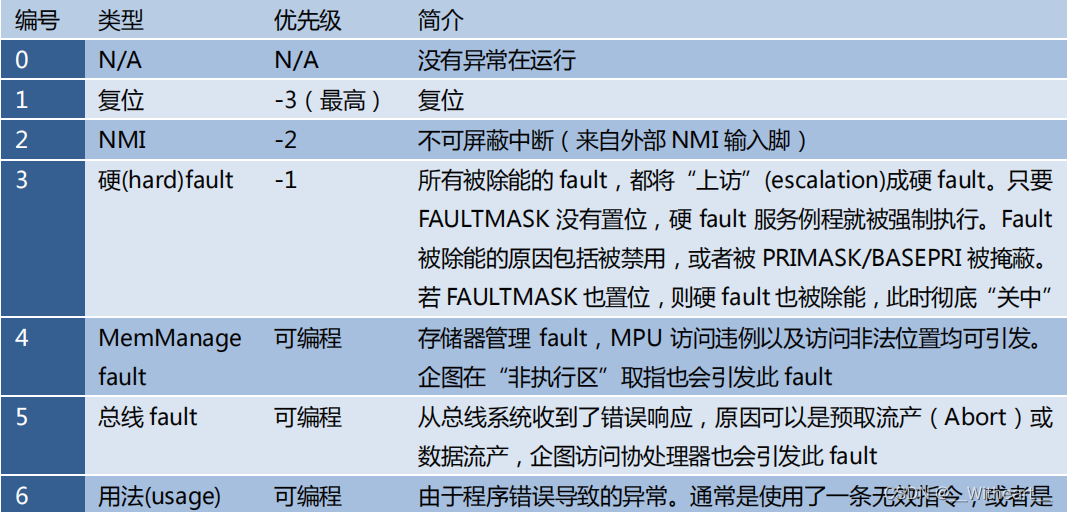
- ARM 为 Cortex-M3 内核 一共设计了 255 个中断,编号为 1~255,而 0 表示没有异常
- 这里的编号单纯只是这些中断的一个序号,而不是优先级
- 编号 1-15 是内核中产生的、而 16-255 属于来自内核外
2. 优先级与编号的关系
- 对于编号为 1-3 的中断,其优先级是固定的,从 -3 到 -1
- 编号为 4-255 的中断,其优先级都是可以编程的

3. 优先级配置寄存器
- Cortex-M3 内核最多可以使用 8 位来表示优先级,共 256 级( STM32F1 使用了 4 位共 16 级)
- 抢占优先级最多为 128 级
- Cortex-M3 内核把这 8 位还分成两半,高位的一半配置抢占优先级,低位的一半配置子优先级
- 当使用 8 位时,至少有 1 位表示子优先级
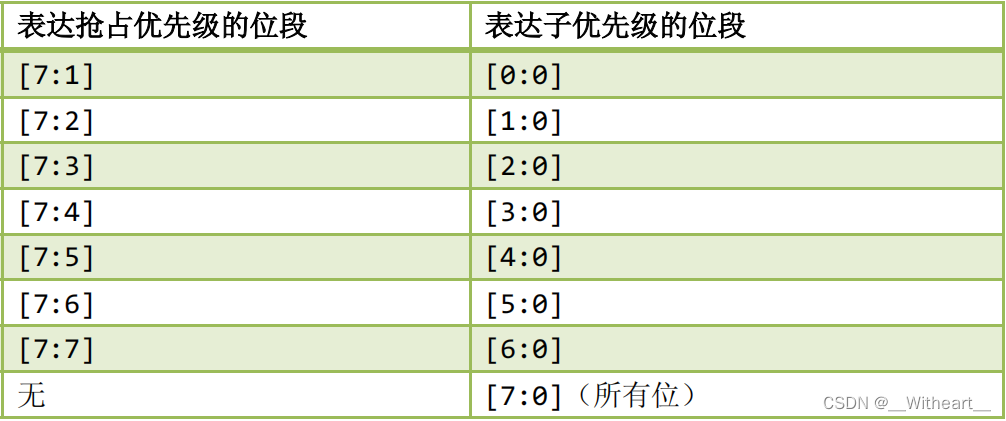
- 当使用 8 位时,至少有 1 位表示子优先级
三、STM32F1XX 的中断优先级
1. 中断数量和编号
- STM32F1XX 只使用了 Cortex-M3 内核中定义的六十几个中断(深色代表内核中断):

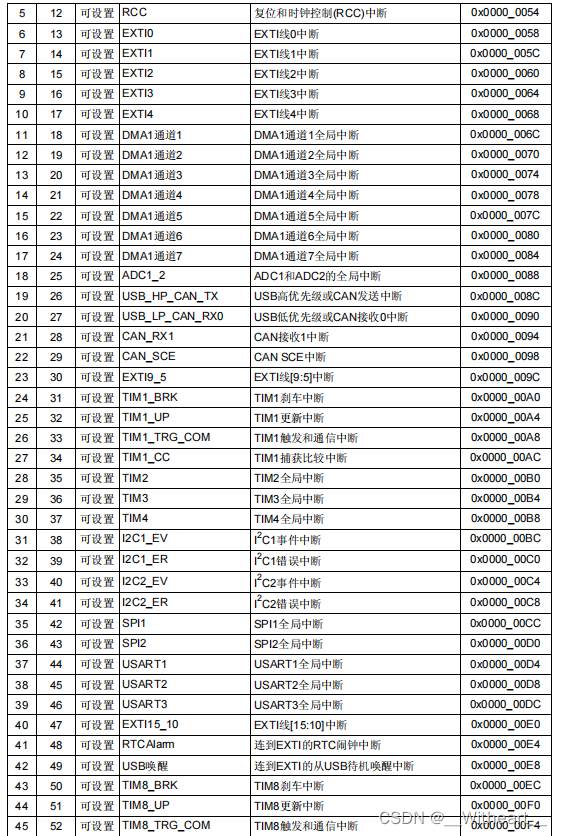
等等等等 - 可以看到,编号 0 及以上的中断的优先级都是可编程的
2. 中断优先级配置
- STM32F1XX 使用了 4 位来表示中断优先级
- 不管使用多少位,都是 MSB 对齐的
- 所以实际上是使用优先级配置寄存器的高 4 位进行中断优先级配置
- 也有抢占优先级和子优先级之分
| 抢占优先级 | 子优先级 |
|---|---|
| 0 位 | 4 位 |
| 1 位 | 3 位 |
| 2 位 | 2 位 |
| 3 位 | 1 位 |
| 4 位 | 0 位 |
三、SVC 和 PendSV 详解
- “SVC”:SVC是"Supervisor Call"的缩写,也被称为系统服务调用或简称为系统调用。
- “PendSV”:PendSV是"Pending Supervisor Call"的缩写,用于可悬起系统调用。
1. SVC
① SVC 是什么
用户程序(基于 FreeRTOS 之上的程序)通过 SVC 使用系统服务函数。
一个例子是当启动任务调度器的时候, FreeRTOS 通过 SVC 启动第一个任务,详见:【学习日记】【FreeRTOS】调度器函数实现详解
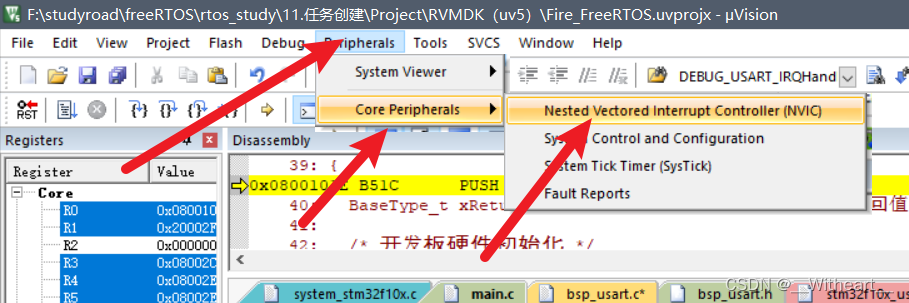
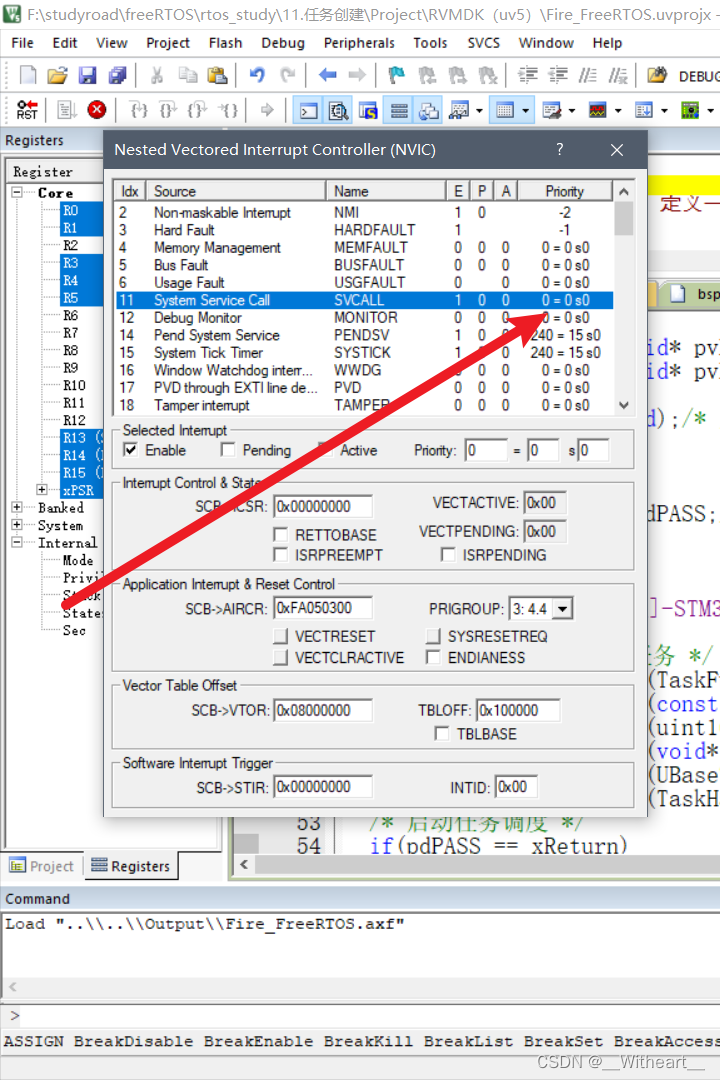
② SVC 的中断优先级
实际上,在 FreeRTOS 中并未显式配置 SVC 的中断优先级。
我们可以开启调试查看,可以看到默认优先级是 0:
③ 使用 SVC 的好处
- 操作系统(OS)负责控制具体的硬件,使用户程序从控制硬件的繁文缛节中解脱出来。
- OS的代码经过充分的测试,提高系统的健壮性和可靠性。
- 用户程序无需在特权级下执行,避免用户程序误操作导致系统瘫痪的风险。
- 通过SVC的机制,使用户程序与硬件无关,简化了开发难度和繁琐度,使应用程序跨硬件平台移植成为可能。
- 应用程序只需了解操作系统提供的应用编程接口(API),并使用SVC提出请求,而无需了解硬件的操作细节。
2. PendSV
① PendSV 是什么
可悬起的系统调用,顾名思义,是可以像普通的中断一样被悬起的中断。也就是触发后如果优先级不够,会等到时机合适再执行。
在 FreeRTOS 默认配置为优先级最低的 15。
② PendSV 的应用
在 FreeRTOS 中,被用于任务的切换。
在 FreeRTOS 中,我们在 SysTick 中断中触发 PendSV,在 PendSV 进行任务切换。
如果不使用 PendSV 进行任务切换,那么当 SysTick 的优先级不是最低时:
-
理想情况下,任务A 执行一段时间后进入 SysTick 中断,在 SysTick 中断中进行上下文切换到任务B
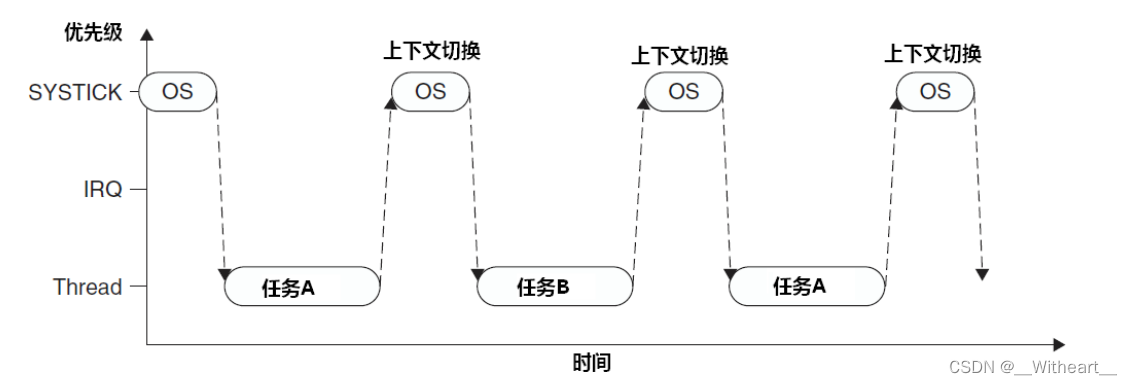
-
糟糕的情况是,任务A 执行一段时间后进入了一个中断,在中断中又进入到 SysTick 中断,并在其中尝试上下文切换,也就是切换到主线程中,但是第一个中断还未执行完毕(这会导致 Usage Fault,因为其使中断执行一半就跳会到主线程,如果允许这样做系统将没有实时性的保证)
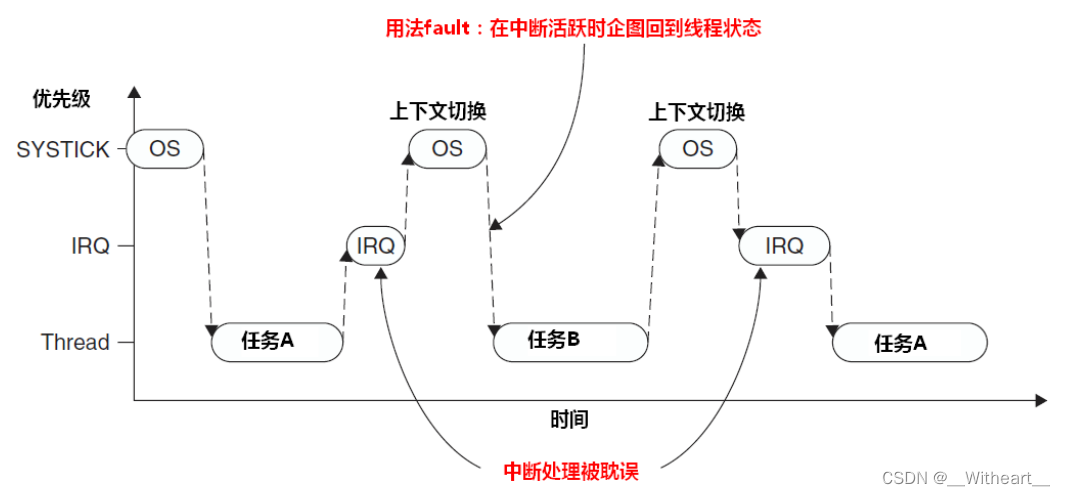
如果使用了 PendSV,则可以使上下文切换的动作暂时搁置,先执行完中断再进行上下文的切换。
不过,值得深思的是,在 FreeRTOS 的默认配置中, SysTick 的中断优先级被配置为最低的 15,这意味着其不能打断任何的中断,那么使用 PendSV 可能有其他更充分的理由。
四、运行在 STM32 上的 FreeRTOS 中断优先级的配置
1. 中断优先级分组
使用分组 4,也就是 16 级的抢占优先级、0 级的子优先级:
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
2. FreeRTOS 内核优先级
① 定义
在 FreeRTOSConfig.h中,由 configKERNEL_INTERRUPT_PRIORITY 定义:
- configPRIO_BITS:使用 4 位来表示优先级
- configLIBRARY_LOWEST_INTERRUPT_PRIORITY:配置内核优先级为最低级 15 级
- configKERNEL_INTERRUPT_PRIORITY:将最低优先级左移,使 MSB 对齐
#define configPRIO_BITS 4
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
② 内核优先级的作用范围
那么这个内核优先级究竟是谁在用呢?实际上就是 SysTick 中断和 PendSV 中断在使用。
SysTick 用于时间片轮转、PendSV 用于上下文切换:
#define portNVIC_PENDSV_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 16UL )
#define portNVIC_SYSTICK_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 24UL )
/* Make PendSV and SysTick the lowest priority interrupts. */
portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;
3. 临界段保护的中断优先级
① 临界段保护就是关中断
- 之前提到过 FreeRTOS 的临界段保护,进入临界段也就是关中断。
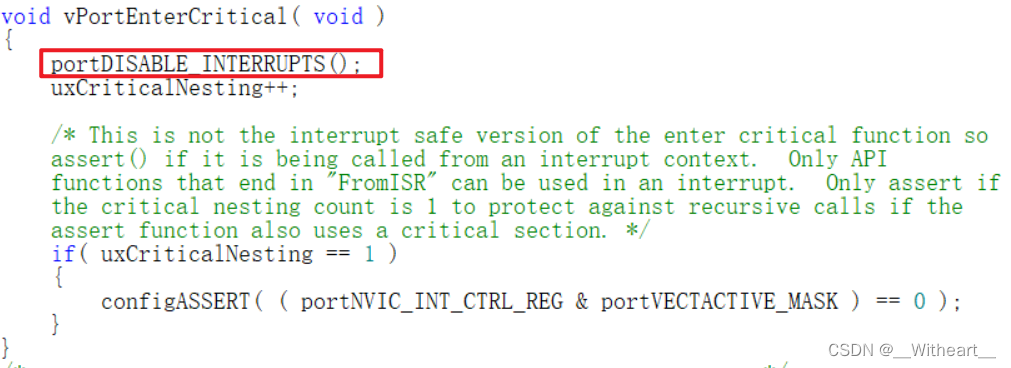
② 如何关中断
- 关中断是通过写 basepri 进行操作的:
详情见【学习日记】【FreeRTOS】临界段的保护
static portFORCE_INLINE void vPortRaiseBASEPRI( void )
{
uint32_t ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;
__asm
{
/* Set BASEPRI to the max syscall priority to effect a critical
section. */
msr basepri, ulNewBASEPRI
dsb
isb
}
}
-
basepri 是 MSB 对齐(在 STM32F1 中,basepri 是八位的寄存器,可只使用其中某几位,MSB 对齐指最高位对齐,也就是当只使用其中某几位时从最高位开始用,低位不管)用法和优先级配置寄存器类似:
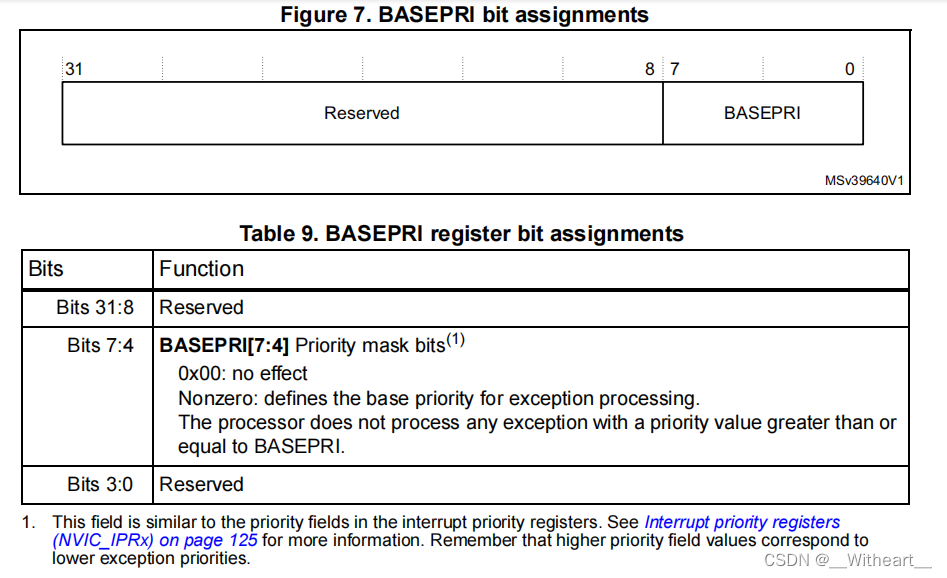
-
basepri 设定为大于其值的中断都会被屏蔽(此处的中断优先级指 STM32 的中断优先级而不是 FreeRTOS 我们为任务设定的优先级):

下面是 FreeRTOS 中进入临界段时对 basepri 的设置,设置为 5,也就是 FreeRTOS 进入临界段时,中断优先级 5-15 的中断都被屏蔽:
//系统可管理的最高中断优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
后记
如果您觉得本文写得不错,可以点个赞激励一下作者!
如果您发现本文的问题,欢迎在评论区或者私信共同探讨!
共勉!


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











