






 本文详细介绍了使用树莓派3B进行小车图像识别与控制的全过程,包括选择合适的编程语言、处理图像噪声、实现PID控制、模板匹配及图像识别等关键步骤。重点探讨了HSV颜色空间在图像识别中的应用,以及如何通过模板匹配和透视变换提高识别精度。
本文详细介绍了使用树莓派3B进行小车图像识别与控制的全过程,包括选择合适的编程语言、处理图像噪声、实现PID控制、模板匹配及图像识别等关键步骤。重点探讨了HSV颜色空间在图像识别中的应用,以及如何通过模板匹配和透视变换提高识别精度。
文末有有道翻译的版本,翻译的不准确的地方再来对照英文就清楚了
另外需要注意的是,在拟合到目标图像的四个角的位置后,对原图像进行投影变换再二值化进行模板匹配(而不是对二值化图像直接进行投影变换)效果要好不少
————
更新, 竟然有这么多人感兴趣,看来拿树莓派小车当课题的学校不少啊~
那我就在图片之间添加一些我认为比较重要的中文个人心得吧。
我用的是树莓派3b,两个串口里只有AMA0能用,另一个好像时钟源不太行,需要对系统进行更改,百度上一大把教程,我们学校提供的树莓派系统已经改好了,还带有opencv和codeblocks……
这里提到了python造成主板损坏,其实不是的(用脚指头想也不可能),问题是我们老师设计的H桥母版有问题,在和arduino进行通讯时产生了一些未知错误。总体来说,使用python对树莓派编程肯定是最方便简单的。
在刚开始我把图片转化成了灰度图,用灰度值来区分颜色,蠢到不行。除非你能保证整个地板的光是均匀反射的,否则灰度值完全不可靠。最可靠的还是HSV,我建议先写一个实时探测hsv的面板,用opencv自带的控件,来看地面上无论是黑线也好红线也好还是别的什么颜色的线,它们的hsv值到底是多少。磨刀不误砍柴工嘛。
网上大部分的循迹方法都是取一行像素来计算,可以是可以,但是小车速度比较快,路线比较曲折的情况下就很容易出错了,因为很容易冲过头。所以最好的办法是选择一个矩形区域内的所有像素点,计算左右两边的目标颜色的像素点个数差,再用这个差值进行PID计算是最好的。当然这个矩形大小要控制好,个人经验一般循环超过5K次的话,计算速度就赶不上小车速度了。所以可以先用resize函数把图片缩小一点。
这里介绍了均值滤波算法,没什么好说的,去除一些小噪点用的,如果你用的是一行像素点的方法,噪点的影响比较大,可以用这个算法滤波。但是如果用我建议的矩形区域方法,那小噪点的影响基本上就是微乎其微了,用不着滤波,找好HSV值就够了。
边缘检测canny函数非常非常好用,因为单个的噪点是构不成边缘的,所以如果要滤波,与其选择那些杂七杂八的滤波算法,还不如选择边缘检测把整个图像二值化了。当然,像后期老师要求根据地面线颜色的变化来选择不同的路线,这个时候肯定就不能用边缘检测了。


在图像匹配中,最重要的依然是选择合适的HSV值进行二值化。要保证目标图像充分和周围的环境区分开来,所以我前面强烈建议先写探测HSV的控件面板,因为HSV值太重要了,直接影响到识别的精度。
二值化后就是拟合目标图形了,三角形有三个点,四边形有四个点,五边形就有五个点……找到这些点的位置过后就可以用投影变换把要匹配的图像“摆正”了。

注意,找到点位后,对原图像进行投影变换会更合适,因为HSV二值化后目标图形肯定会有一点失真的,投影变换会进一步放大这个失真。把原图像变换后,再用resize把图片放大一点,再来匹配,成功率就会非常非常高了。
后面的内容是投影变换,模板匹配,形状拟合等等函数的代码,需要的自取。
 中文版本:
中文版本:
摘要
这个实验的目的是用树莓派搭建一个小车,期望它能跟随黑线并识别特定的图像等等。利用OpenCV对摄像机图像进行处理,图像识别的主要方法是模板匹配。为了提高识别的准确性,需要在匹配之前对图像进行处理。
介绍
研究人员已经在之前的实验中(使用Arduino)建造了这辆车。因此,最初的想法是用树莓派代替Arduino。Pi和MCU的不同之处在于Pi有1GB左右的内存,可以安装系统(甚至Windows)。因此,Pi几乎支持每一种编程语言。研究者从Moodle下载了系统,它已经配置了OpenCV。
研究者使用的Pi模型是3B,它有两个输出串口(ttyAMA0和ttyS0)。但ttyAMA0是开发人员分配给蓝牙模块的,ttyS0没有时钟源(波特率基于CPU时钟,不可靠)。因此,用户可以将系统文件改为使用ttyAMA0(官网的具体课程)。另一种方法是使用USB端口与CH340(一个小模块转换USB到TTL。有些型号甚至还有校正芯片)。研究人员测试了两种方法,发现USB端口比ttyAMA0更可靠(100次转换没有错误,而ttyAMA0有5到10个错误)。
研究人员已经利用PID控制和光传感器实现了线跟踪。在这个实验中,主要的挑战是图像处理。因此,研究者一开始就选择了python作为编程语言,它在图像处理方面比c++有更多的优势,而且OpenCV有一个完整的python
API。另外,研究者选择Arduino作为slave计算机直接控制车辆(一个愚蠢的想法)。不幸的是Arduino导致了底座板的故障,浪费了一天时间来修复。在这次事故后,研究者放弃了python(当时没有人知道是python或Arduino导致了故障)。
为了识别图像中的黑线,研究者首先要找到黑线的颜色值。OpenCV支持多种颜色标准,研究者先后测试了gray(单通道),RGB和HSV(三通道)。研究者首先选择灰度图像(简单且计算量低),黑到白对应0
- 255。在这种情况下,只有一个数字被用来描述颜色。然而,由于光的反射,灰度值有时并不准确。在此情况下,本实验中考虑饱和的HSV更适合描述黑线或任何颜色。一旦识别出黑线,研究者就可以计算出线与图像中心的距离。另外,计算误差的算法很多,具体方法将在方法部分进行讨论。
行过之后,车辆应能识别图像。研究人员使用伺服来调整相机的位置(检测到粉色方块后,伺服旋转90度)。这个演示的难点在于摄像头没有直接面对图像,因此研究者首先需要重置图像的位置。而且很难找到准确的图像HSV值。
方法
直线跟踪算法
所有行跟踪算法的主要目的是找到其颜色值为黑色的像素。研究人员测试的第一种方法是使用numpy(一种用于科学计算的python库)查找一排图像中的所有黑色像素。首先,创建一个列表来存储一行像素:
选中的是200行。
然后使用numpy库找到所有的黑色像素:
Black_count = numpy。总和(颜色<
10)
Black_index = numpy。(颜色<
10)
在这段代码中,黑色像素的数量被记录为Black_count,位置也被记录为Black_index(一个二维数组)。黑色的灰度应该是零,然而,因为光线反射的效果,一些黑色像素的灰度大于零(在强光区域,它甚至可以超过50 !)
然后找到黑线的中心:
Center =
(Black_index[0][Black_count-1] + Black_index[0][0]) / 2
误差= 320 -中心
Black_index[0][0]是第一个找到的黑色像素的位置(从左到右),Black_index[0][Black_count-1]理论上是最终的黑色索引。因此,它们的中间应该是黑线的中心。在这种情况下,它与行中心的差值(图像的像素为640×320,所以中心应该是640/2 = 320)描述了车辆与黑线的距离。
如果没有检测到黑色像素,程序将报告错误并停止运行。因此,需要特殊处理:
试一试:
Center = (Black_index[0][Black_count-1] +
Black_index[0][0]) / 2
误差=
320 -中心
除了:
没有黑色像素//如果在尝试中发生错误,这一行工作。
但由于现实因素的影响,该算法的性能并不理想。最大的问题是图像中有一些噪点(一些像素本应该是白色却显示为黑色,本应该是黑色却显示为白色)。为了解决这一问题,研究者对图像进行了噪声消减和侵蚀。OpenCV提供了许多平滑算法,研究人员选择了平均滤波:blur()。
平均过滤和侵蚀的原理并不复杂。对于平均滤波,每个像素根据周围像素的平均值重新分配,并指定其范围。模糊函数有输入图像、输出图像和范围三个参数。
模糊(input_image output_image,大小)
大小实际上是参与计算的面积。例如Size(3,3),即取3×3区域内像素的平均值,并将其分配到中心像素。在这种情况下,一些小的噪声点被删除(如灰尘或污点)。
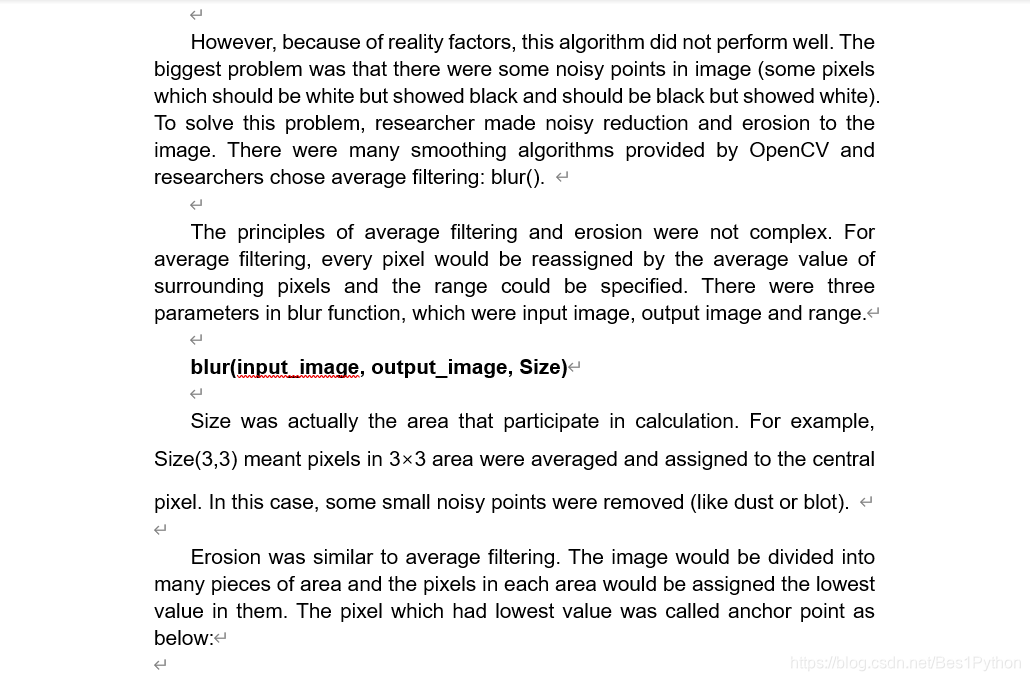
侵蚀与平均过滤相似。将图像分割成多个区域,每个区域的像素被赋值为其中的最小值。值最小的像素称为锚点,如下图所示:
图(1)
在这种情况下,图像的亮度在侵蚀后会下降。黑暗的区域会变得更明显,而明亮的区域会减少甚至消失。因此,消除了黑线中的噪声点。此外,如果车辆沿着白线行驶,研究人员可以使用膨胀使图像更亮(与侵蚀相同,但采用最亮值)。结果部分将显示所有图像处理的效果。
根据误差,采用PID进行误差计算和控制。在这个过程中,研究者考虑使用Arduino来计算PID和控制车辆,并通过USB数据线与Pi通信。在本例中,Arduino承担了部分计算任务。此外,Arduino还内置了AD/DA转换器,方便了其他模块的连接。但是如果Arduino将错误的信号传输到baseboard,就会造成损坏(研究者没有baseboard的代码,所以没有人知道它是怎么坏的)。在实验的最后,研究者再次尝试Python,发现使用Python的串行API是可行的(无论使用什么程序语言,串口都是通过ASCII来传输信号)。换了底板后,研究员回到c++。
没有numpy库,研究人员使用循环找到黑色像素:
for (int i
= 0;我< 640;我+
+)
{
如果((int) gray.at < uchar
(200年,我)<
{
Center = i;//检测到黑色像素
打破;
}
}
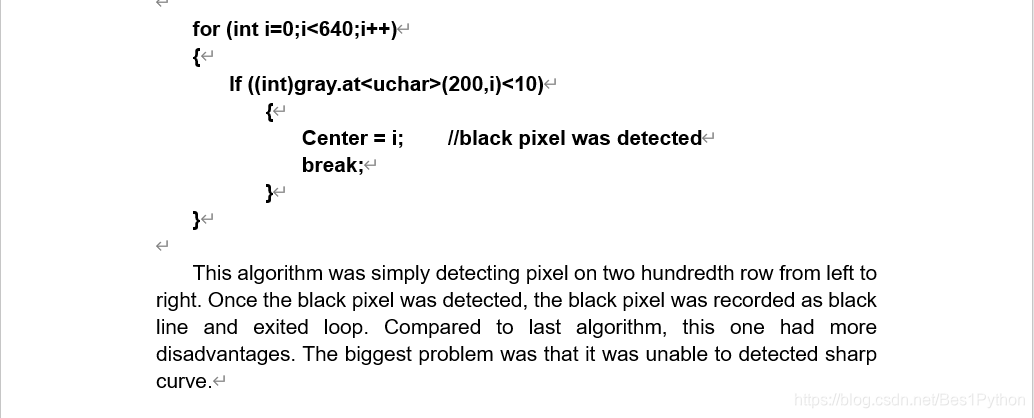
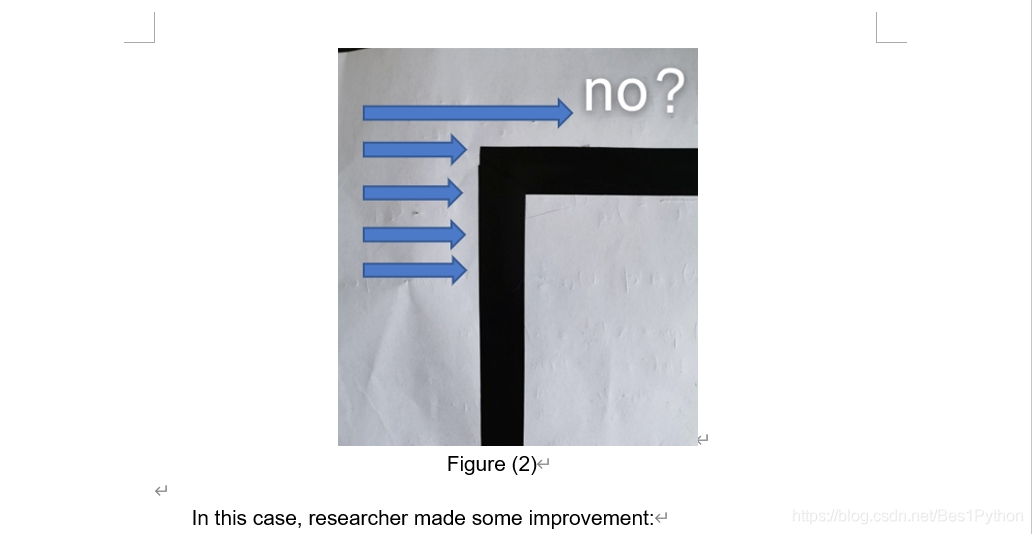
该算法简单地从左到右对200行像素进行检测。一旦检测到黑色像素,黑色像素记录为黑线并退出循环。与上一种算法相比,该算法有更多的缺点。最大的问题是无法检测到尖锐的曲线。
图(2)
在这种情况下,研究者做了一些改进:
int i, j。
(我=
0;< 640;我+ +)
{
如果((int) gray.at < uchar
(200年,我)<
{
打破;
}
}
(j = 640; >我;j——)
{
如果((int) gray.at < uchar
(200年,j) < 10)
{
中心= (j + i) / 2;
打破;
}
}
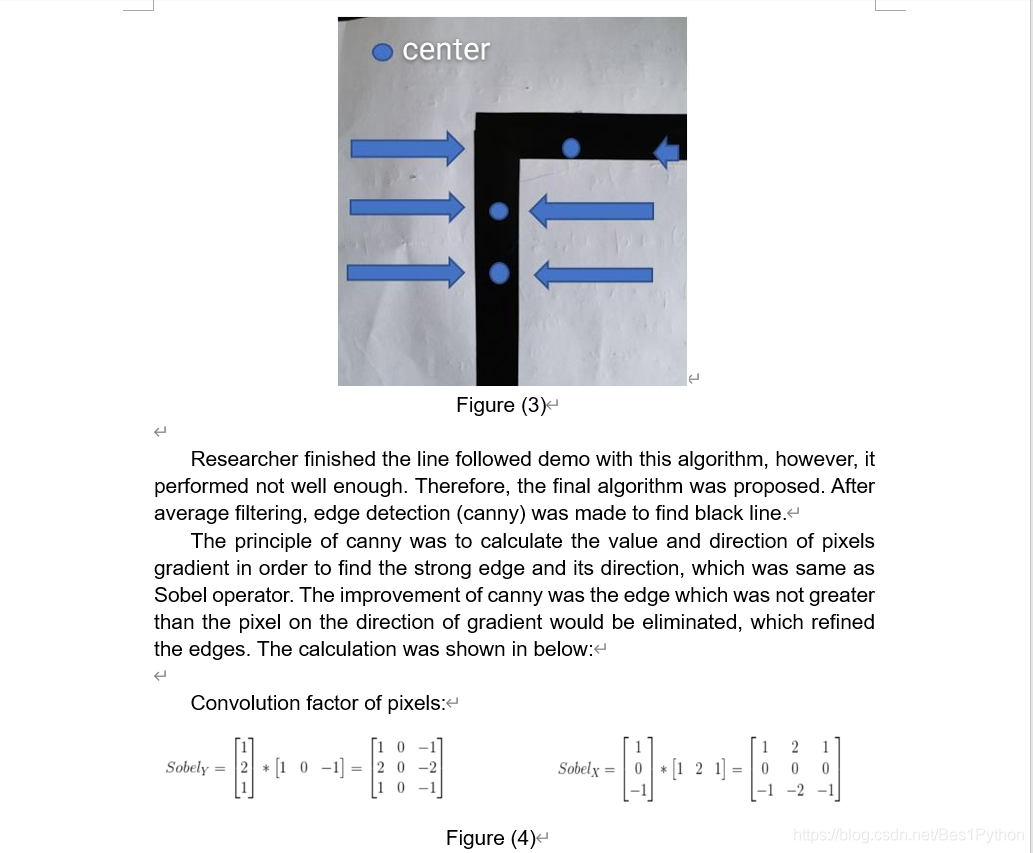
该算法原理如下:
图(3)
研究人员用这个算法完成了生产线的演示,但是,它的表现不够好。因此,提出了最终的算法。平均滤波后进行边缘检测(canny),找到黑线。
canny的原理是计算像素梯度的值和方向,从而找到强边缘及其方向,与Sobel算子相同。canny的改进是将梯度方向上不大于像素的边缘去除,从而细化了边缘。计算结果如下:
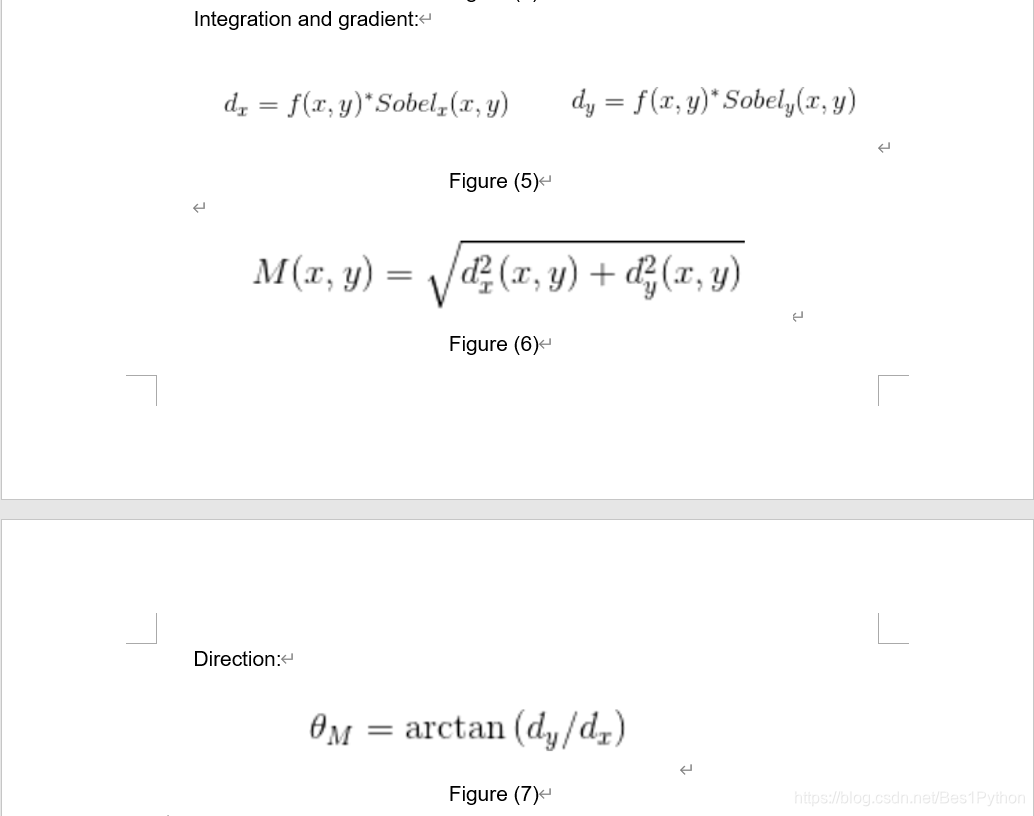
像素的卷积系数:
图(4)
集成和梯度:
图(5)
图(6)
方向:
图(7)
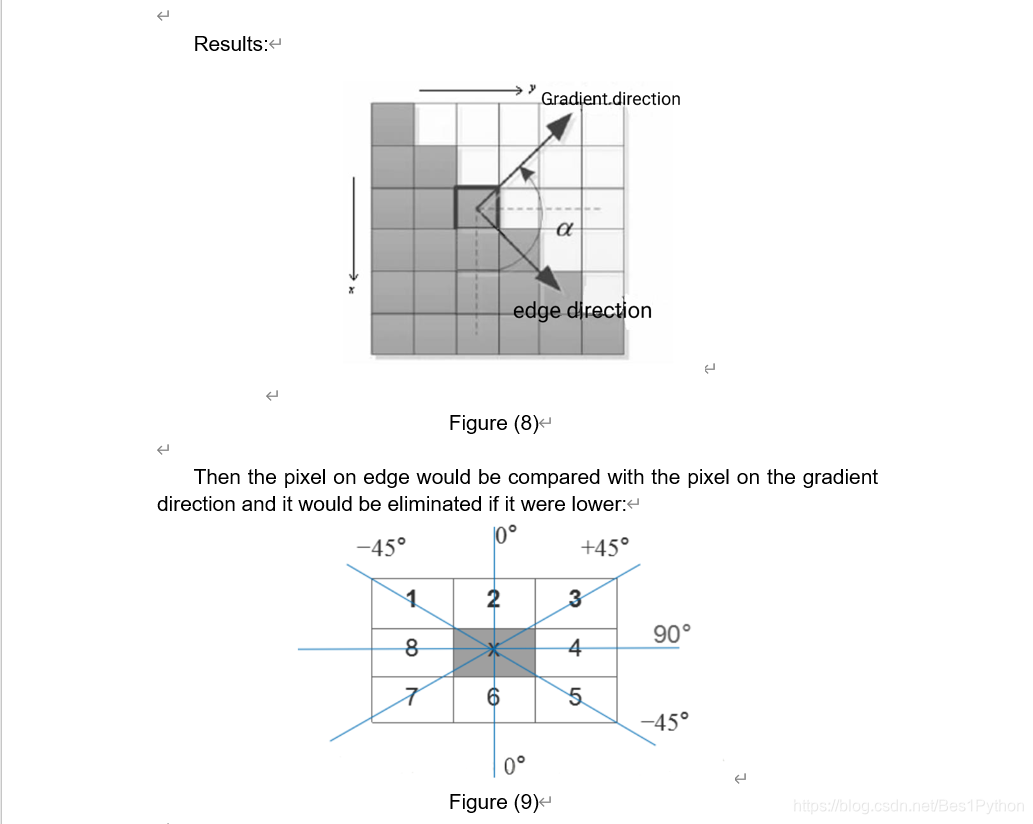
结果:
图(8)
然后将边缘上的像素与梯度方向上的像素进行比较,低于梯度方向的像素将被消除:
图(9)
例如,如果图(9)中的x为3,梯度方向为90度(从左到右)。因为x=3和x<4,它被赋值为0。在这种情况下,只保留值最大的像素,并对边缘进行细化。
最后的算法如下图所示:
int left_count = 0;
int right_count = 0;
调整大小(灰度,160,60)//调整图像大小以减少计算量
(int i = 20,我< 30;我+
+)
{
for (int j = 0; < 80; j
-
+)
{
If
((int)gray.at(i,j)==255) //canny改变黑线为//白色
{
left_count + +;
}
}
for (int j = 80; j <
160; + +)
{
如果((int) gray.at < uchar
(i, j) = = 255)
{
right_count + +;
}
}
}
Center = left_count - right_count
在该算法中,研究者选择一个区域并找到其中所有的黑色像素点。然后分别记录左侧和右侧的黑色像素个数。left_count和right_count的差值表示偏移(如果黑线的中心正好在图像的中心,那么left_count应该等于right_count)。
此外,有时车辆仍然不能跟随急转弯,因为转弯速度太低,黑线超出了相机的视野。在这种情况下,研究者增加了一个新的参数来记录黑线的方向:
int left_count = 0;
int right_count = 0;
int line = 0;
调整大小(灰度,160,60)//调整图像大小以减少计算量
(int i = 20,我< 30;我+
+)
{
for (int j = 0; < 80; j
-
+)
{
If ((int)gray.at(i,j)==255)
//canny改变黑线为//白色
{
left_count + +;
}
}
for (int j = 80; j <
160; + +)
{
如果((int) gray.at < uchar
(i, j) = = 255)
{
right_count + +;
}
}
}
Center = left_count - right_count
如果(中心>
0)
{
线= 1;//黑线倾向于被留下
}
其他的
{
黑线趋向于正确
}
if (left_count0&&right_count0)//无黑线,继续旋转
{
if (line == 1)
{
Vehicle_turn_left ();
}
其他的
{
Vehicle_turn_right ();
}
}
其他的
{
PID ();
}
黑线的趋势用一个整数变量“线”来记录。一旦黑线离开了相机的视野,车辆就会转向,直到再次找到黑色像素为止(转向的方向取决于“线”的值)。另一种方法是用退却代替“转身”,这种方法非常可靠,几乎不会出错。唯一的缺点是不够流利:
如果(left_count = = 0
&&right_count = = 0)
{
Vehicle_retreat ();
}
另一个演示是“快捷键”。一些不同颜色的曲线被放置作为捷径。期望车辆走捷径,不同的捷径对速度的要求不同。为此,研究人员在黑线之前添加了颜色检测:
int color = 0;
for (int j = 0; < 80; j + +)
{
(int)hsv.at<vector3b>(20,j)[0];
(int)hsv.at(20,j)[1];
(int)hsv.at(20,j)[2];
如果(pixel was red) //HSV更适合寻找特定的颜色
{
颜色=
1;
打破;
}
if(像素为蓝色)
{
颜色= 2;
打破;
}
…
/ /重复……
}
然后用不同的“Color”值编写相应的代码。
最后的演示是图像识别,并完成了相应的任务,如距离测量(使用HC_SR04)和踢球等。伺服拿着相机,一旦发现粉色方块,伺服就会举起相机。本报告将简单介绍HC_SR04,主要介绍图像识别。
HC_SR04是一个超声波测距模块。它有四个引脚:VCC, GND, TRIG和ECHO。三角函数是波发射的触发器。如果给它一个高电平信号(至少10美元),这个模块就会产生超声波,并将回声设置为低电平,直到它收到声波的反馈。因此,记录回声变化的时间可以简单地计算出距离。代码:
include < stdio . h >
include < wiringPi >
include < sys / time.h >
#定义回声2
#定义三角3
wiringPiSetup ();
pinMode(呼应,输入);
pinMode(三角、输出);
浮动说;
struct timeval t1;
struct timeval t2;
长start_time;
长end_time;
而(1)
{
digitalwrite(三角,0);
delayMicroseconds (2);
digitalWrite(三角,1);
delayMicroseconds (10);
digitalWrite(三角,0);
而(! (digitalRead (Echo) = =
1));
gettimeofday (t1, NULL);
而(! (digitalRead (Echo) = =
0));
gettimeofday (t2, NULL);
start_time = t1.tv_sec *
1000000 + t1.tv_usec;
end_time = t2.tv_sec *
1000000 + t2.tv_usec;
说=(浮动)*
0.017;
printf("距离=
% dcm \ n”,说);
}
图象识别
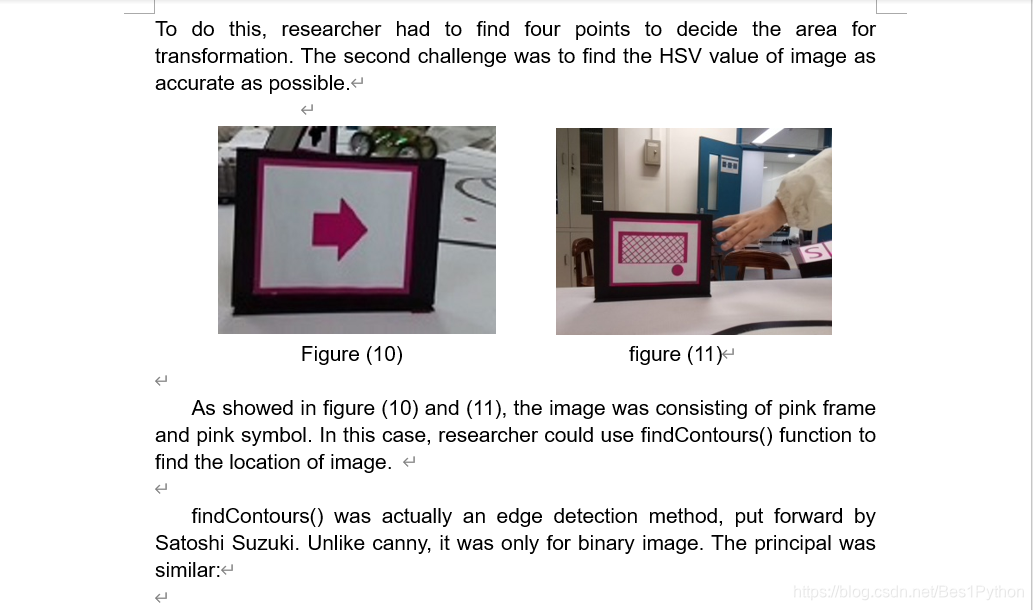
图像识别的方法是模板匹配。在这个过程中,有两个主要的挑战。第一个是视角转换。为了做到这一点,研究人员必须找到四个点来决定转换的区域。第二个挑战是尽可能准确地找到图像的HSV值。
图(10)图(11)
如图(10)和(11)所示,图像由粉色框架和粉色符号组成。在这种情况下,研究者可以使用find等值线()函数来查找图像的位置。
findcontour()实际上是Satoshi
Suzuki提出的一种边缘检测方法。与坎尼不同的是,它只适用于二值图像。校长也差不多:
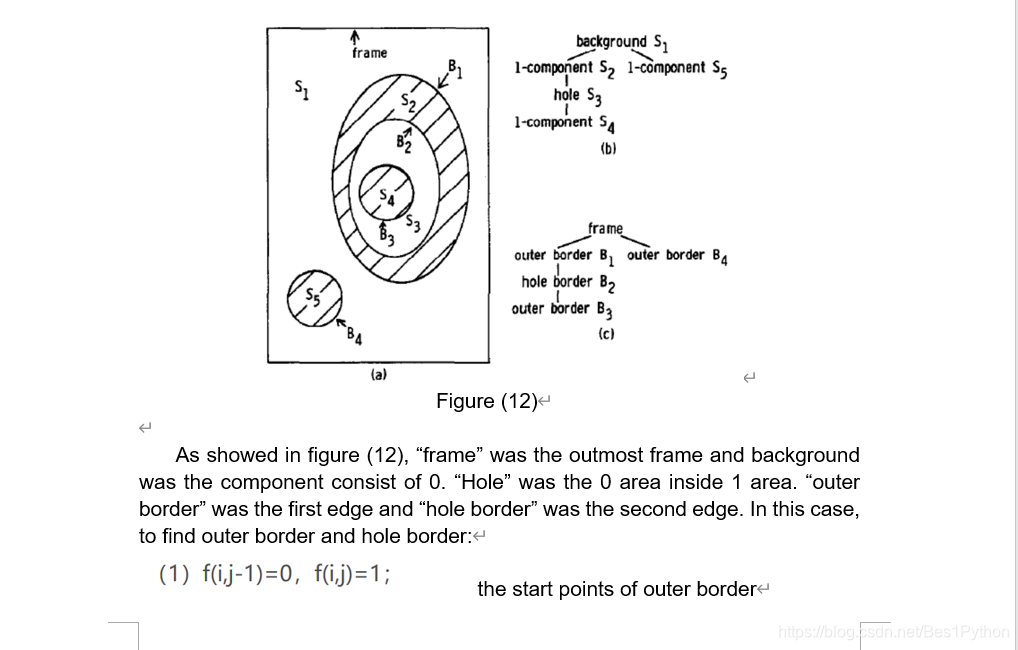
图(12)
如图(12)所示,“frame”是最外面的frame,
background是由0组成的组件。“洞”是1区域内的0区域。“外边”是第一个边,“洞边”是第二个边。在本例中,查找外边界和孔边界:
外边界的起点
孔边界的起始点
找到边界后,用编码对像素进行标记,称为NBD。当找到新的边时,NBD
-
1。如果满足f(p,q)=1且f(p,q+1)=0(这意味着边的结束)的点,设该点为-NBD。用这种方法,可以找到边缘。
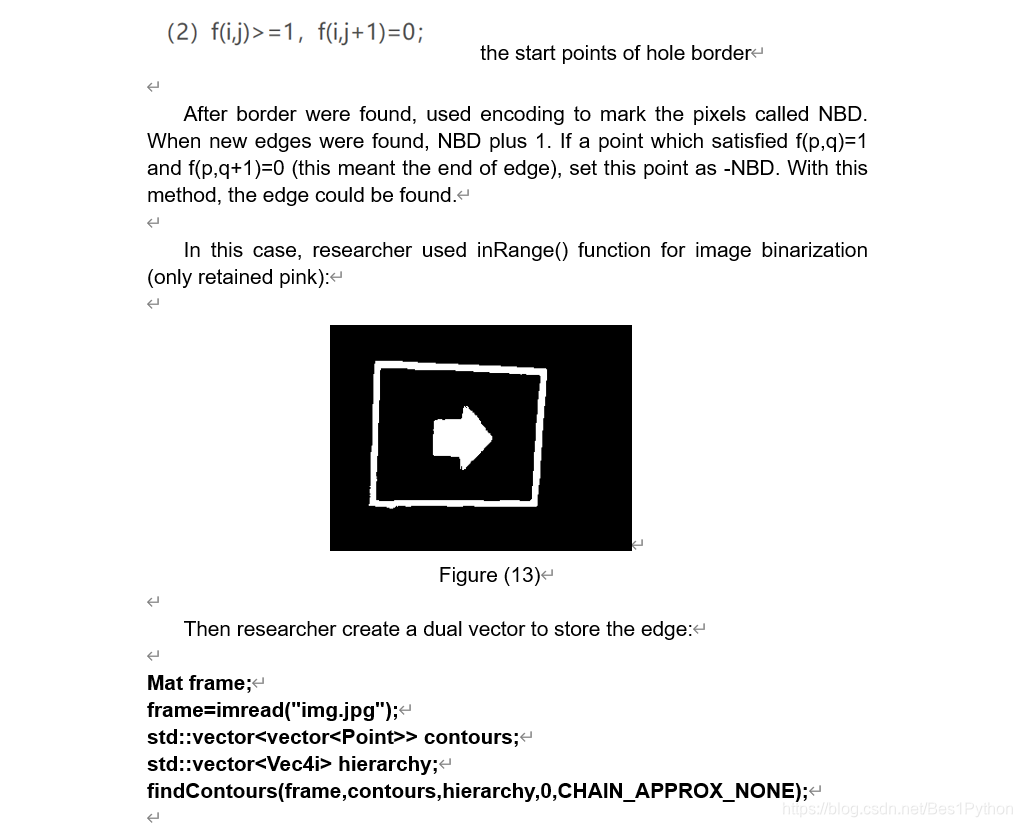
在这种情况下,研究者使用inRange()函数进行图像二值化(仅保留粉色): 图(13) 然后研究者创建一个对偶向量来存储边缘:
垫框架;
帧= imread (“img.jpg”);
std::矢量< <上>
轮廓;
std::向量< Vec4i >层次结构;
findContours(框架、轮廓、层次结构、0,CHAIN_APPROX_NONE);
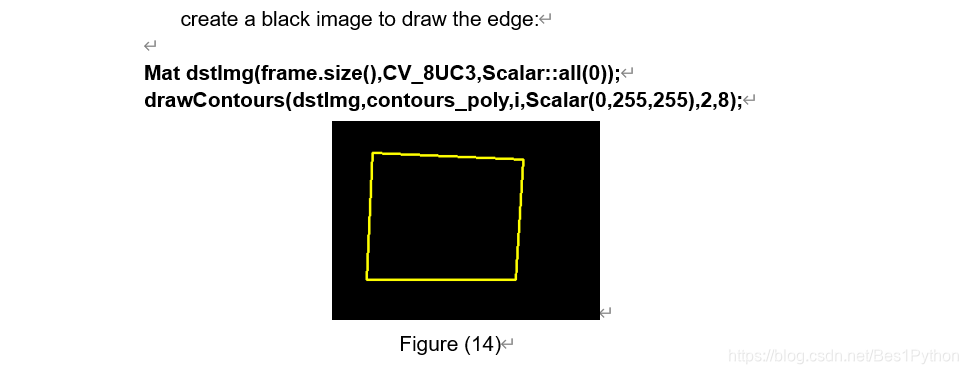
创建一个黑色图像绘制边缘:
垫dstImg (frame.size ()、CV_8UC3标量::(0));
drawContours (dstImg contours_poly,标量(0255255),2、8);
图(14)
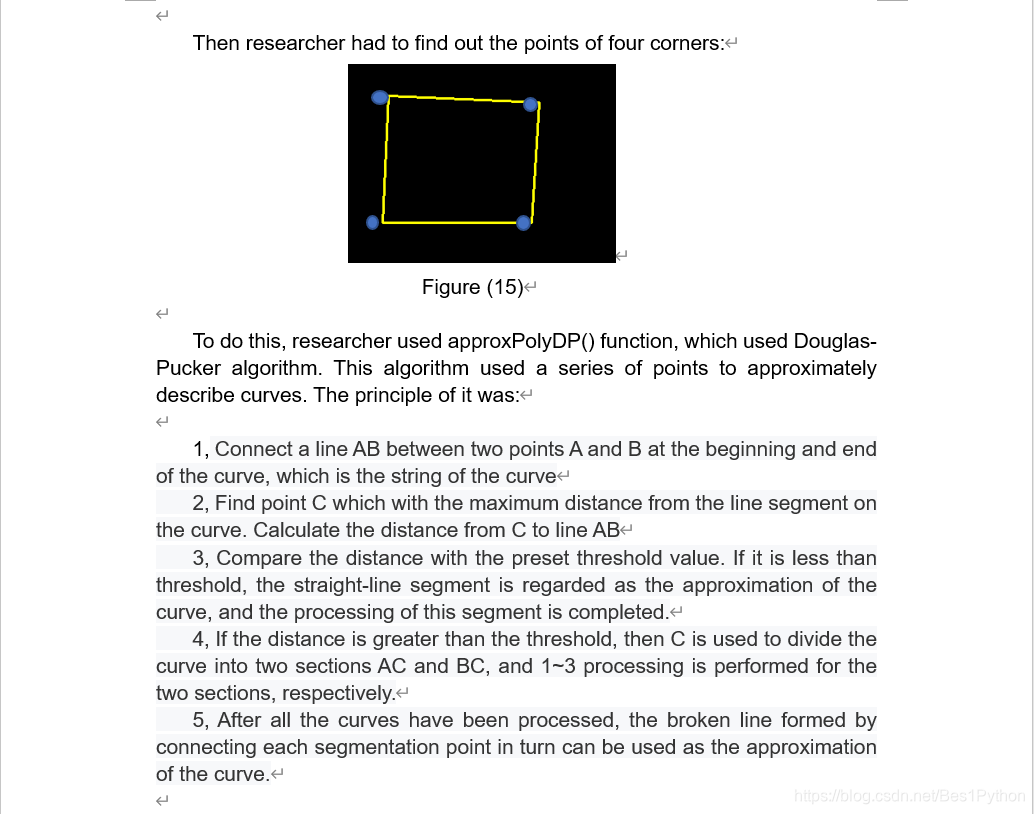
然后研究者要找出四个角的点:
图(15)
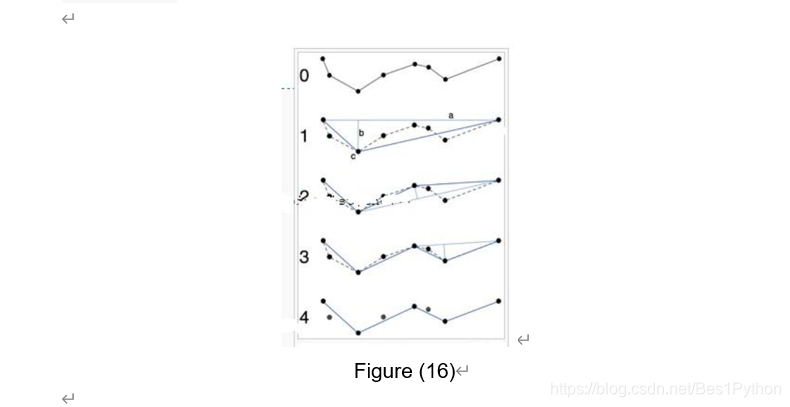
为此,研究者使用了approxPolyDP()函数,该函数使用Douglas-Pucker算法。该算法利用一系列点对曲线进行近似描述。它的原理是:
1、在曲线的开始和结束点a和点B之间连接一条直线AB,这就是曲线的弦
2、求出曲线上与线段距离最大的点C。计算从C到直线AB的距离
3、将距离与预设的阈值进行比较。如果小于阈值,则将直线段视为曲线的近似值,完成该段的处理。
4、如果距离大于阈值,则用C将曲线划分为AC和BC两段,分别对这两段进行1~3处理。
5、处理完所有的曲线后,将每个分割点依次连接起来形成的折线作为曲线的近似。
图(16)
因此,需要一个对偶向量(点类型)来存储函数的返回值。
代码:
std::矢量< <上>
contours_poly (contours.size ());
approxPolyDP(垫(轮廓[我]),contours_poly[我],30岁,真的);
对于四边形,approxPolyDP()的返回应该是四个向量。因此,创建一个大小为4的向量来存储角的位置:
std::向量<点>
finalContours (4);
for (int i = 0;我< 4,我+
+)
{
finalContours[我]=
contours_poly[0][我];
}
如果存在一些噪声点(一条以上的边),则需要检查每个向量的大小,找出大小为4的那个。
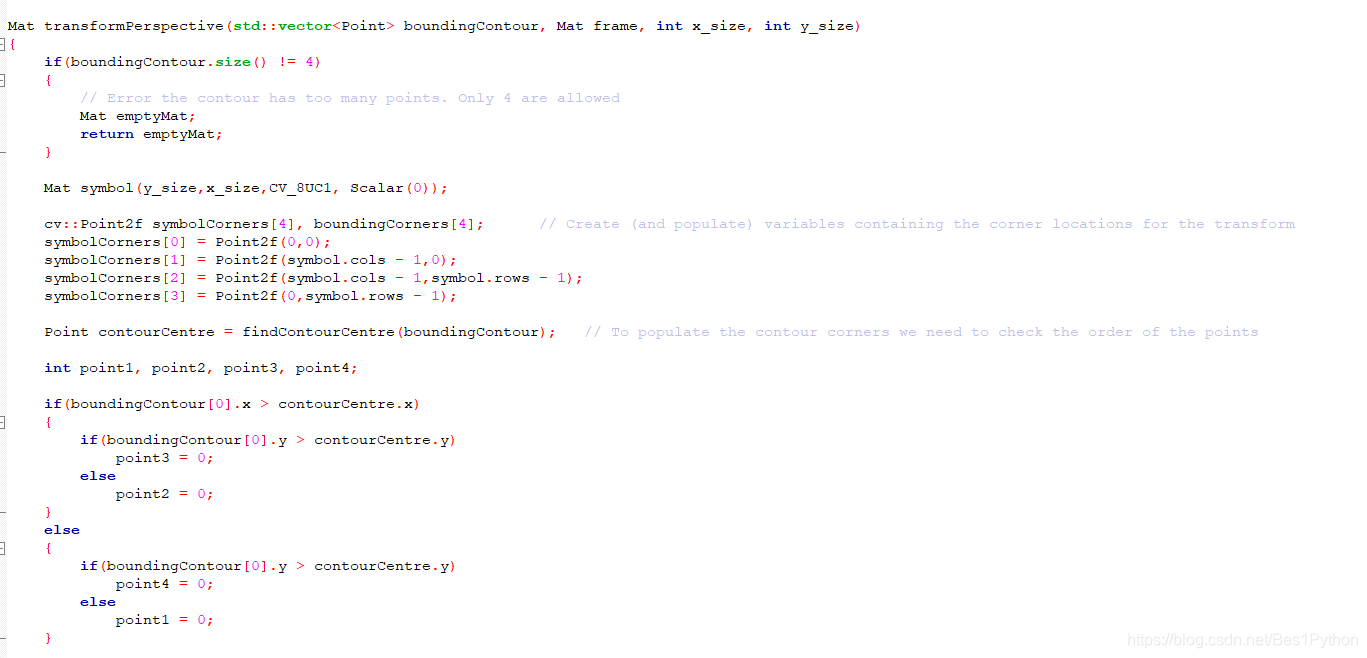
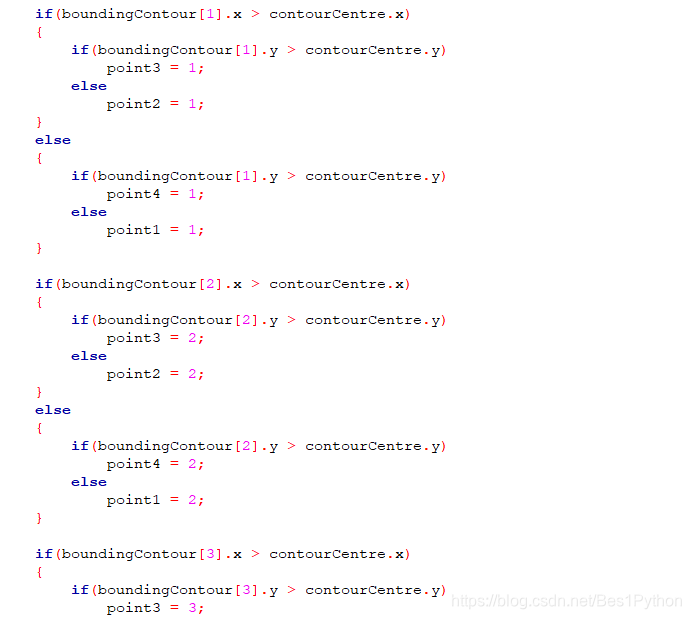
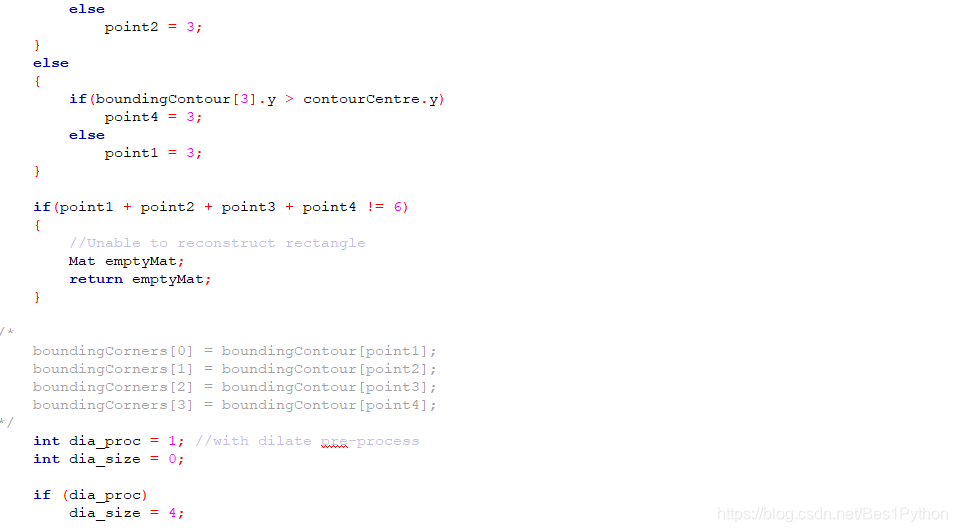
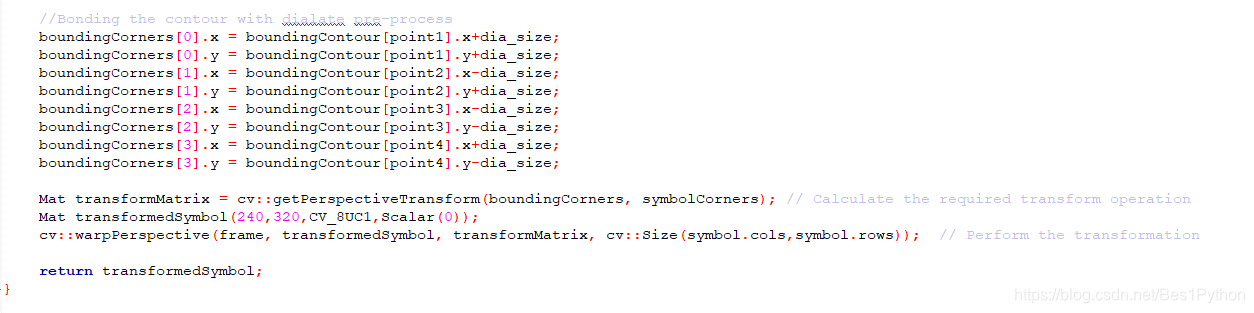
最后利用透视变换对图像的位置进行校正。其方程为:
图(17)
u和v为原图像,对应x和y(经过变换后):
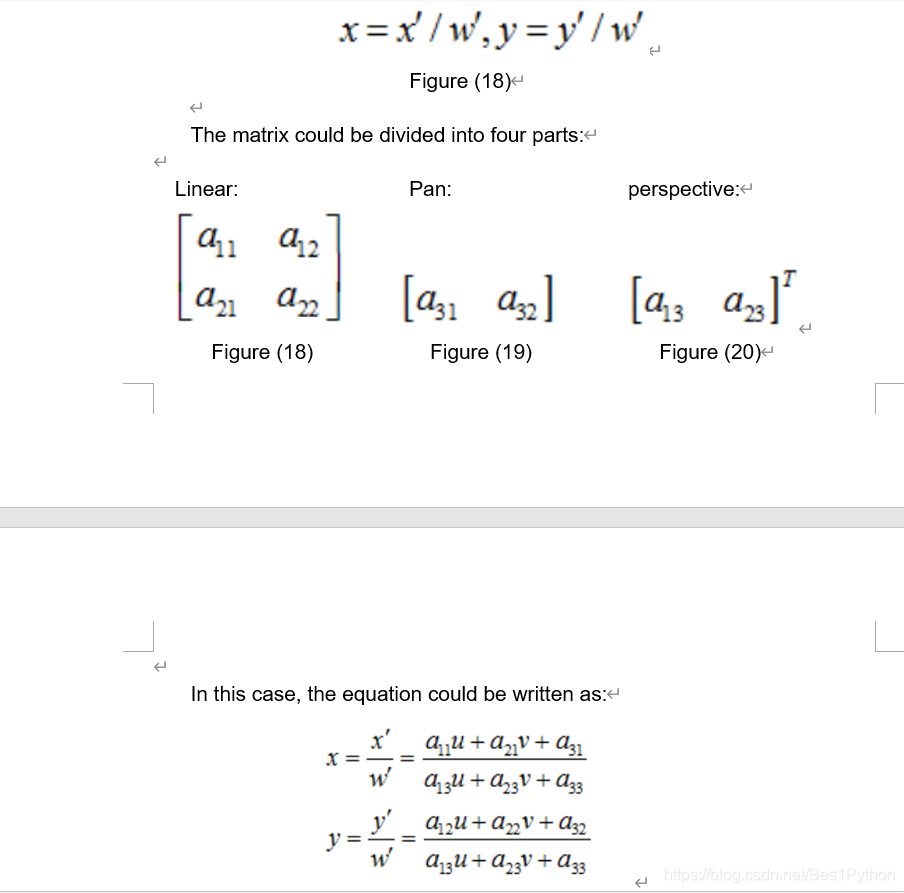
图(18)
该矩阵可分为四部分:
线性:锅:角度:
图(18)图(19)图(20)
此时,方程可以写成:
图(21)
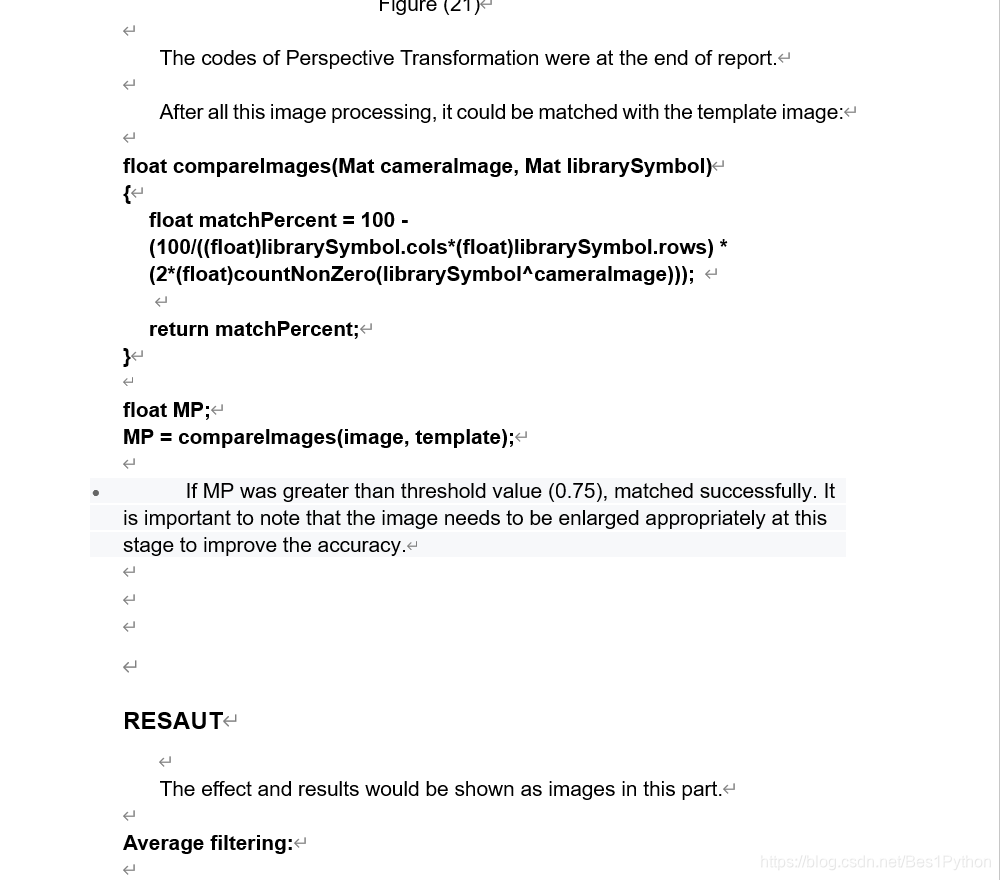
透视转换的代码在报告的最后。
经过这些图像处理后,可以与模板图像进行匹配:
float compareImages(Mat cameraImage, Mat librarySymbol)
{
(2(float)countNonZero(librarySymbol^cameraImage)));
返回matchPercent;
}
浮动议员;
MP = compareImages(图像,模板);
·
如果MP大于阈值(0.75),匹配成功。值得注意的是,在这个阶段图像需要适当放大以提高精度。
RESAUT
效果和结果将在这部分显示为图像。
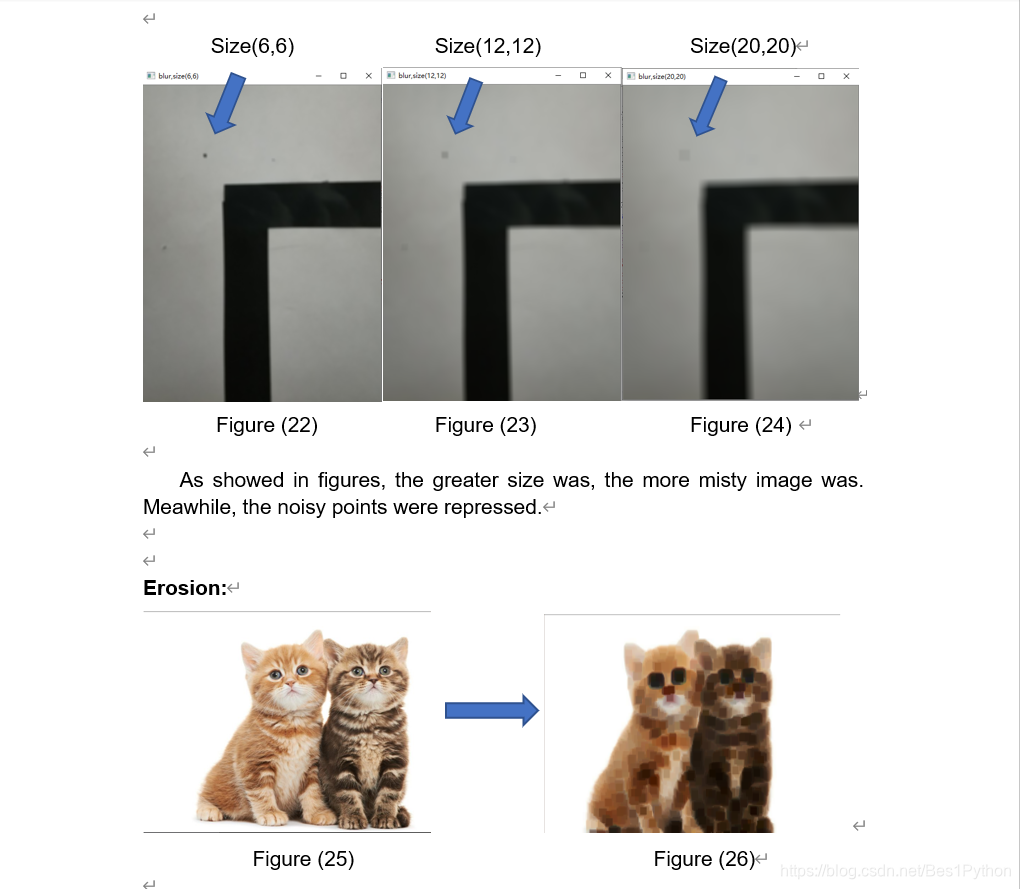
平均滤波:
大小(6,6)大小(12日12)大小(20、20)
图(22)图(23)图(24)
如图所示,尺寸越大,图像越模糊。有一会儿,吵闹的地方被压抑了。
侵蚀:
图(26)图(25)
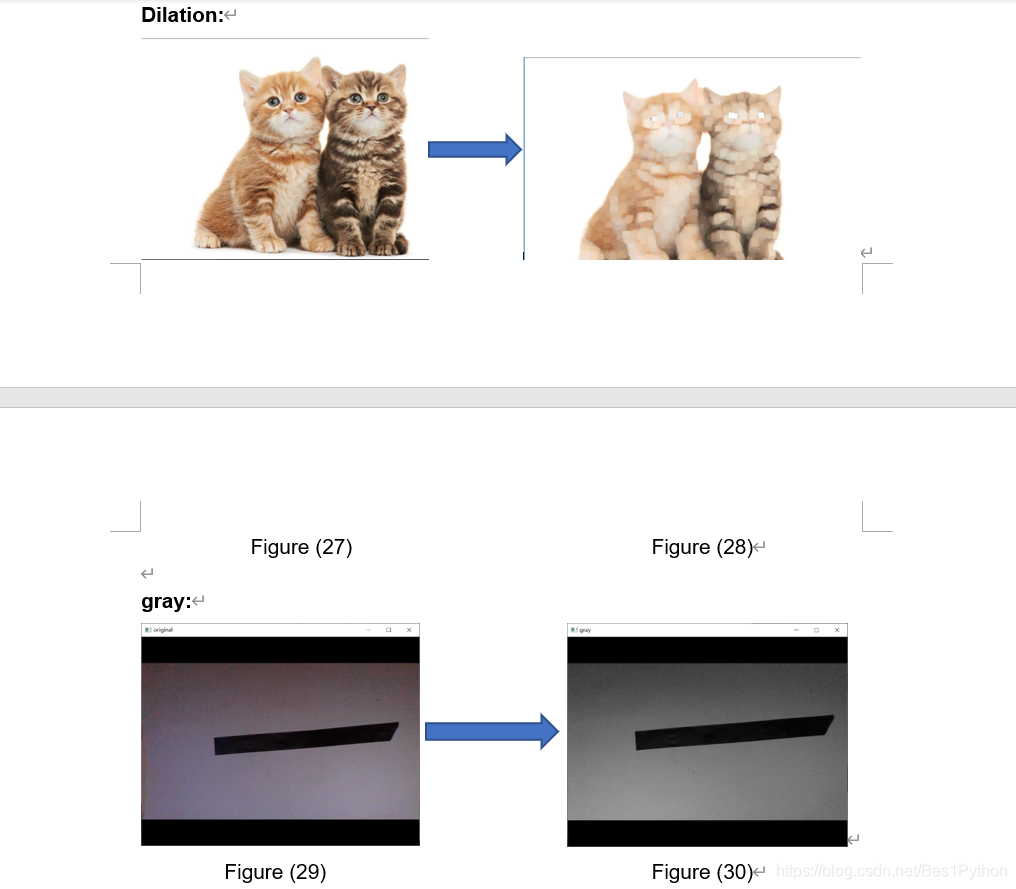
膨胀:
图(27)图(28)
灰色:
图(29)图(30)
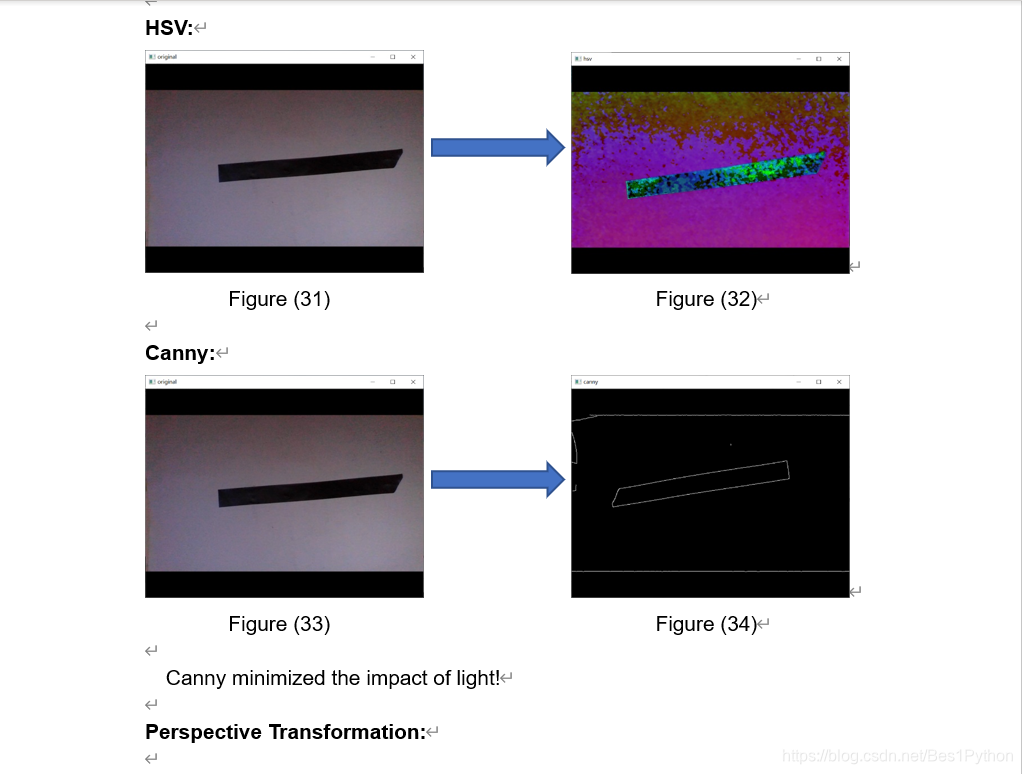
HSV:
图(31)图(32)
精明的:
图(33)图(34)
坎尼最小化了光线的影响!
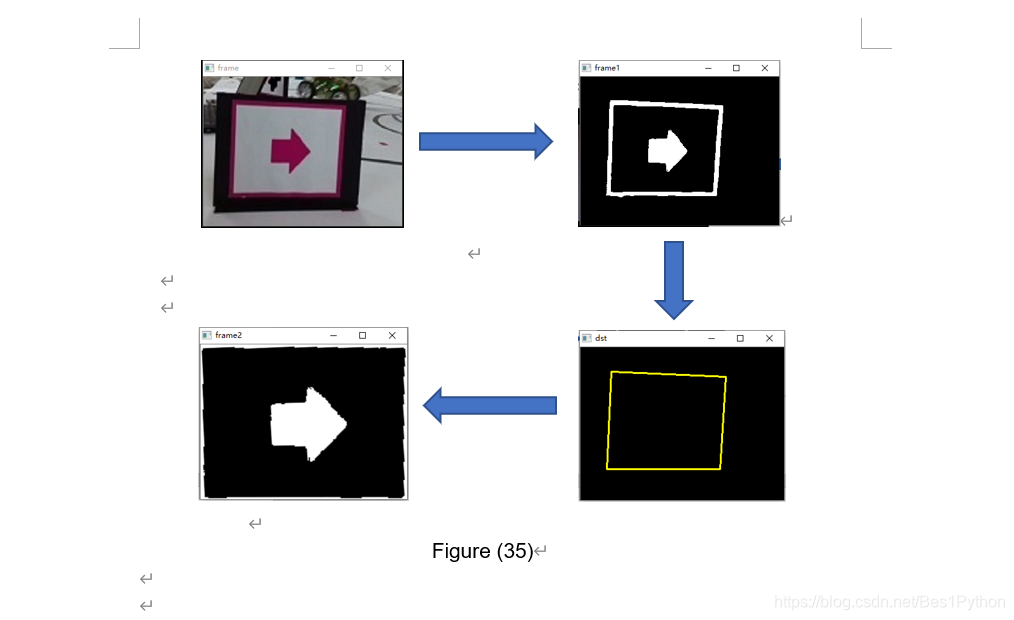
视角转换:
图(35)
讨论
在这项实验中,研究人员在最初几天没有使用HSV。显然,在明亮的环境下,灰色不能准确地描述颜色。此外,很难找到合适的HSV值用于图像识别。模板匹配本身的缺点也限制了匹配成功率。
为了改进,级联分级机是更好的选择。研究人员可以从不同角度收集图像的照片,不需要使用透视变换,更加方便。
结论
在本实验中,研究人员很不幸地完成了黑线跟踪、捷径和少量的图像识别演示。但是,研究人员学习了不同的颜色标准,几种图像处理算法,并逐步提高了编码的性能。
参考
铃木s和安倍K。,利用边界跟踪法对数字化二值图像进行拓扑结构分析。CVGIP 30
1,第32-46页(1985)
perspective transformation 的代码:
a
template matching 的代码:


















 6974
6974

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









