









好久没写博客了,今天开一个新坑:电机控制。
这个系列包括:
- 直流电机的电流控制,速度控制,位置控制
- 永磁同步电机(PMSM)的建模
- PMSM的矢量控制(FOC)
- SVPWM的原理,建模以及C语言代码
- Simulink仿真,介绍了如何使用s-function模块模拟处理器,以及相应的离散化模块,同时加入了一些噪声来模拟传感器噪声
- 一些实际应用上的提升,包括滤波器,抗饱和,自适应等等
- 从经典控制到现代控制
下面进入正题。
一个电机,不管是什么结构,总离不开这么两个关键参数:转速和力矩。
我们都知道,电能来源于电流,而机械能则是动能,因此,想要控制电机,最终都要落在控制它的电流上,准确来说,是电枢电流(armature current)。
而电枢上有两个抗性器件:电感和电阻。
因此,电机电流的开环传递函数很简单,Va(s)=sLa*Ia+RaIa
这里为了线性化处理,我们忽略了power converter的延迟(ps: 忽略延迟对直流电机来说影响不大,但对于PMSM来说影响就很大了,这个后面再说)。
power converter我们就用SPWM调制,具体原理可以参考我的逆变器视频,开头就有详细介绍。
下面给出控制框图: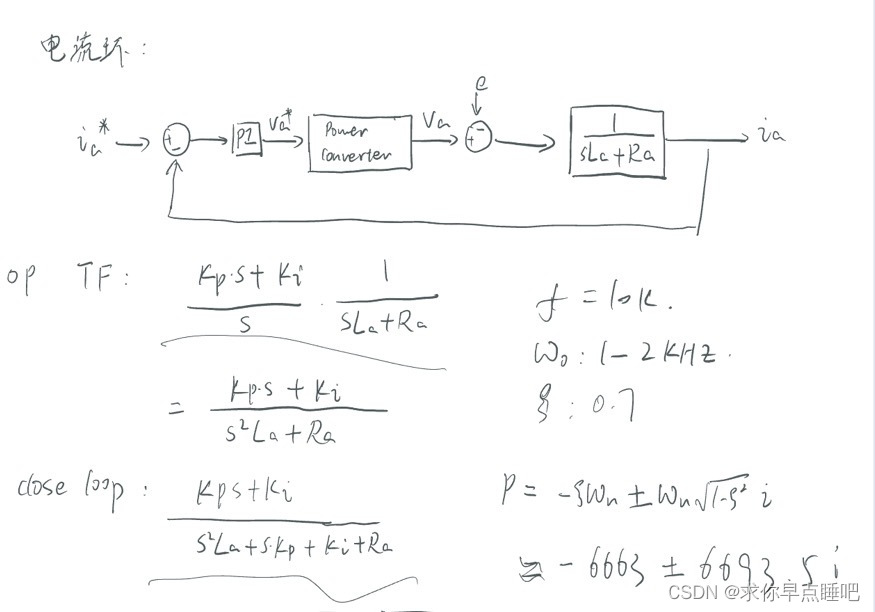 一般电流环的自然频率选择1-2KHz,这里我们选1500Hz,阻尼比0.7,算出来Kp为66.6,Ki为445992。
一般电流环的自然频率选择1-2KHz,这里我们选1500Hz,阻尼比0.7,算出来Kp为66.6,Ki为445992。
这样一来,一个最简单的PI电流控制器就设计好了。仿真我们放到位置控制后面。
现在,在电流控制的基础上,我们就可以进行速度控制的设计了。
首先,这涉及到一个串级控制的概念。
什么是串级控制呢,我们就以直流电机为例进行说明。
前面提到,电机的能量来自于电流,因此,电机控制的核心,就是电流控制。
我们现在已经可以控制电枢电流了,也就是说,我们给定多少电流,只要在电源负载内,电枢的电流就是多少。而电机的速度,是由力矩决定的,而力矩则是由电流决定的。
也就是说,电机的电流越大,是不是速度也就越大?观察直流电机公式,我们不难发现这二者是一个正比关系。
因此,速度控制器是通过控制电机的电流,来控制电机的速度的。
换句话说,速度控制器的输出,就是所需要的电流,即参考电流。
总结一下,所谓的串级控制,即:外环控制器的输出是内环控制器的输入。而控制器的顺序则是由你执行器的物理含义决定的。
什么叫物理含义决定,电机的速度由电流决定,所以电流是内环,速度是外环;而电机的位置则由电机的速度乘时间决定,因此速度是内环,位置是外环。综合起来,由外到内的顺序就是:位置环->速度环->电流环。
好,下面进行速度控制器的设计。
 这个就是速度的控制框图了,其中,KT是力矩常量,就是把电流转化为力矩的物理量,TL是负载力矩,而J是转矩惯量,是把力矩转化成角速度的物理量,B是摩擦系数。
这个就是速度的控制框图了,其中,KT是力矩常量,就是把电流转化为力矩的物理量,TL是负载力矩,而J是转矩惯量,是把力矩转化成角速度的物理量,B是摩擦系数。
如何处理电流控制器呢?一般来说,我们可以把电流控制器当做一阶惯性环节,也就是一个延迟来处理。但鉴于直流电机系统本身比较简单,因此我们把电流控制器的速度设置得比速度控制器快三倍以上,我们就可以把它忽略掉了。
这里我们取wn为150Hz,ζ依然是0.707,算出来Kp是0.133,Ki是88.8,搞定。
前面介绍了直流电机的电流和速度控制,下面来介绍位置控制。
位置控制,也就是电机转到指定相位然后保持静止。
相位 = 角速度×时间,也就是说,相位 = 角速度的积分。
因此位置控制的控制框图很简单:
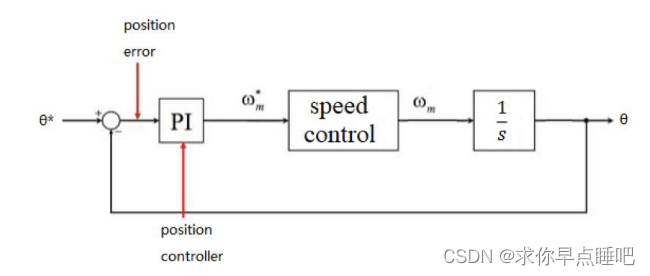
我们取自然频率为10Hz,阻尼比为1(因为不想要过冲),算出来Kp为20,Ki为250。
下一篇文章中,我们将进行直流电机的仿真。写到这里才想起来忘记给定电机的参数了,就在下一篇仿真文章里补充吧。














 5417
5417











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









