







 该例程基于《DisturbanceObserver-BasedControlMethodsandApplications》一书,探讨了非线性扰动观测器在处理常值扰动时的改进形式。通过Simulink仿真,对比了不同参数l(x)=[0,0.1]和l(x)=[0,1]下的观测误差收敛速度,结果显示选择合适的l(x)能加速误差逼近真实值。
该例程基于《DisturbanceObserver-BasedControlMethodsandApplications》一书,探讨了非线性扰动观测器在处理常值扰动时的改进形式。通过Simulink仿真,对比了不同参数l(x)=[0,0.1]和l(x)=[0,1]下的观测误差收敛速度,结果显示选择合适的l(x)能加速误差逼近真实值。
本例程是依据图书《Disturbance Observer-Based Control Methods and Applications》中3.2.2章节Nonlinear Disturbance Observer for Constant Disturbances中的改进形式非线性扰动观测器进行的仿真。
针对系统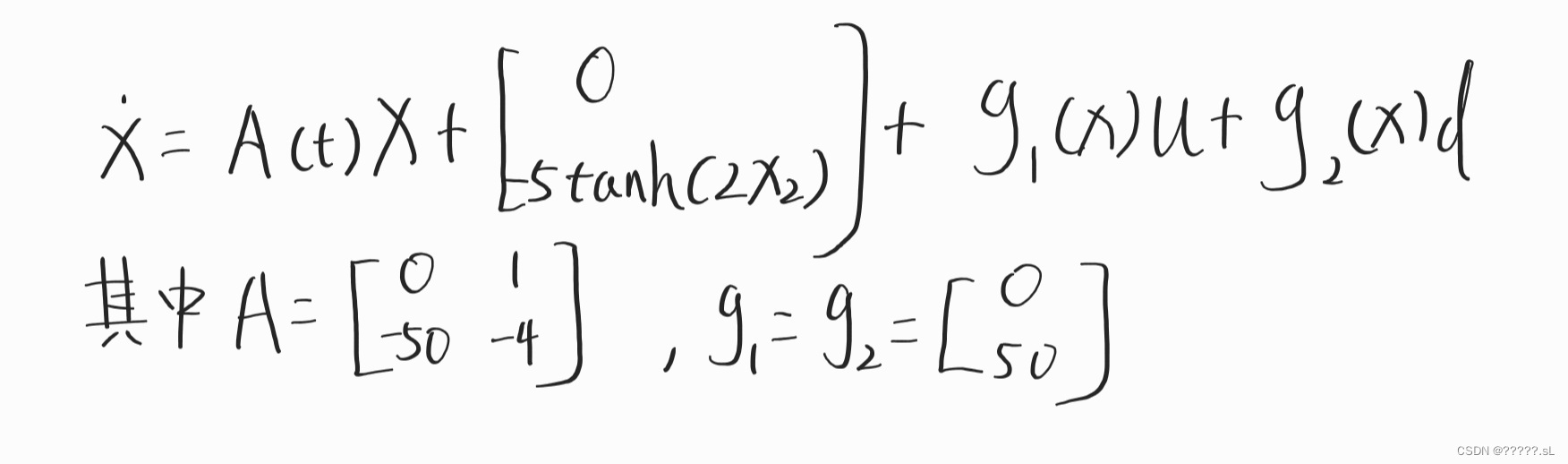
非线性扰动观测器原理图为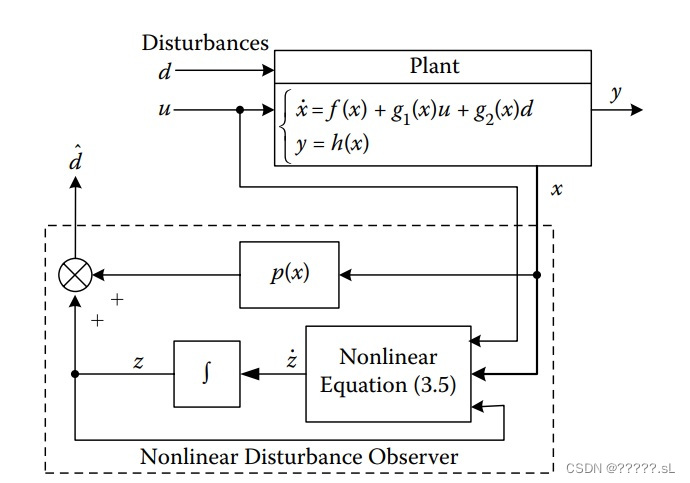
根据书上给的估计扰动的形式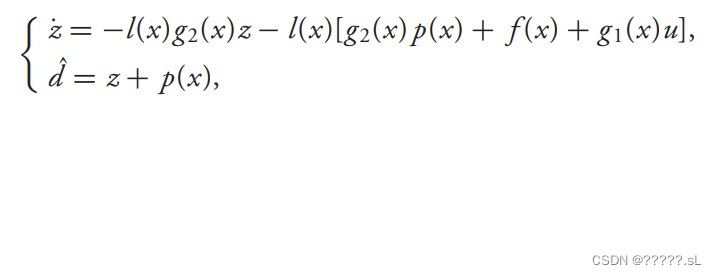
其中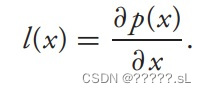
在本例程中分别取l(x)=[0 0.1]和l(x)=[0 1] ,两种参数做对比,可以看出选取合适的l(x)可以使观测误差更快速逼近真实误差。
使用simulink对对象进行仿真,框图为: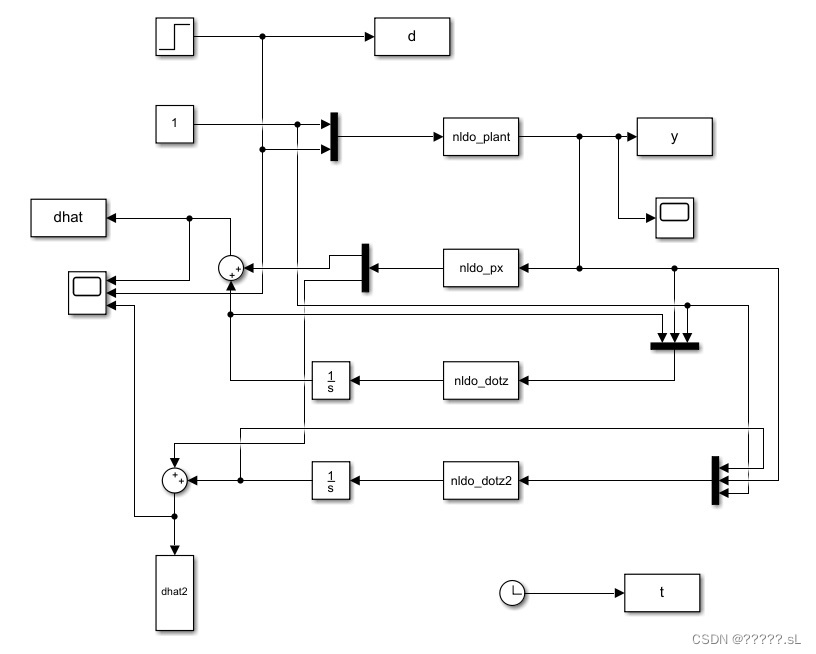
最终的结果为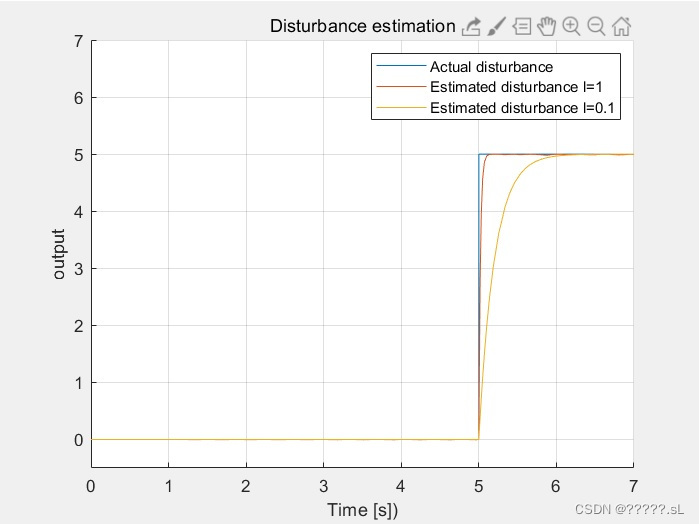
两种参数做对比,可以看出选取合适的l(x)可以使观测误差更快速逼近真实误差。
例程已经上传,不确定对不对,但是大致意思应该是对的,仅作参考!

















 2891
2891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









