







来源:https://www.worthpen.top/blog?id=656617406aa58e39d930191c
这里写目录标题
4 雷达目标识别
4.1 已有方案
4.1.1 零阶张量
(1) RCS
RCS的起伏(不同角度)也能反映目标类别,其属于一维特征,但是通常情况下只能得到目标一个角度的信息,因此是零维特征。RCS本质上就是信号的幅值,因此,以下具有信号幅值特性的,均含有RCS信息。
(2) 极化特征
不同的目标对相同的位置对于不同极化信号具有不同的极化散射特性。
(3) 目标的导弹参数
位置,速度
4.1.2 一阶张量
以下量的生成都是将多个零阶张量沿某个轴如距离、频率或时间等叠加形成的,如果认为这些距离、频率或者时间也是一个量的话,那么这些量加上原来的零阶张量则为一阶张量,再进行叠加形成二阶张量。但实际上通常认为这些量不形成数据,如图片不会给长和宽编码一样,这些量可以通过一个参照点,通过特定间隔,自然形成结构;那么,以下量便是一阶张量。
(1) 径向剖面图
距离-幅值图。可以得到同一目标不同散射中心给出的不同距离。雷达信号表现为不同时刻的脉冲,但是不能分辨其角度,即表现为这些脉冲均来源于一个角度。
(2) 频率调制特性
频率-幅值图。
(3) 时间-幅值图
4.1.3 半二阶张量
该小节的命名为自定义,并不是官方称呼。一些张量比较特殊,其第一阶并不是通过相同的量叠加形成,而是根据信息的维度形成,即第一阶上的量不会任意的叠加。通常情况下,在张量阶数增加的叠加的方向上,叠加应该是任意的。
(1) 解析信号
时间-幅值图。为复信号,实部和虚部分别为两个一维的实信号。同时输入两个一维信号进行处理。
(2) 目标的导弹参数曲线
时间-位置。由位置或速度构成的曲线
4.1.4 二阶张量
(1) 时频-幅值图
时间-频率-幅值。和4.1.2中的频率调制特性类似,但是运用了STFT得到了时频域,并根据时频域进行识别
(2) 信号双谱
频率-频率-幅值。
(3) 慢时间-快时间图
时间-时间-幅值。
(4) 距离-方位-幅值图
距离-方位-幅值。由距离多普勒(RD)算法得到。算法名称中多普勒的意思是指方位向,通过多普勒频移得到的方位信息。这里的方位不是角度,而是距离,这是因为该算法是SAR雷达成像算法, SAR雷达中随着雷达的移动,表明了不同的方位,而不是通过角度来表明不同的方位。
生成SAR图的具体算法输入为快时间慢时间的采样序列,其中慢时间与通常情况下慢时间不同,这里的慢时间是指在不同方位进行采样的回波。随后对该回波进行变换压缩,得到SAR图。
该信号是多个信号的叠加。
4.1.5 三阶张量
(1) 方位-距离-速度-幅值
该信号是多个信号的叠加。
(2) 距离-速度-时间-幅值
只取特定方位内的信息,以上信息都是在这一方位内,所有回波的信号的综合。也有取全部方位内的回波转化为距离-速度-幅值图
(3) 速度-时间-相位差和速度-时间-幅值
输入为三个通道,两个是速度-时间-相位差,这两个分别表明了高低角和方位角;一个是速度-时间-幅值。是半三阶张量。
(4) 时间-采样点-(距离-速度-俯仰-方位-幅值)
括号中算一维,总共是半三阶张量。组成的信息张量的为多个离散量,而不像其他的为连续值
4.2 雷达识别方案
4.2.1 方案一:波形级
4.1中的数据都是由接收到的目标的电磁波进行处理得到。通过处理得到的数据最终只包含了俯仰角、方位角、距离、速度、幅值等信息,这些信息可能已经较为完善,但是相比于原始波形数据,仍有信息量的损失。理论上,可以直接不提取任何特征或进行任何处理,直接将电磁波回波数据进行采样,输入神经网络,实现对目标的识别。一种较为理想的输入是俯仰-方位-快时间波形(含距离-速度-幅值信息)。通过该方式,可以识别干扰,因为方案二得到特征信息,而不是波形信息后,损失了对波形分析的能力,而对波形进行分析可以分析任何目标。
4.2.2 方案二:Heatmap
但是,实际上雷达原始信号包含的信息只有角度-距离-速度-极化,这些都可以通过后处理得到,因此,也可以通过直接处理角度-距离-速度-极化信息来实现目标识别。但是,后处理可能得到错误的角度距离信息,因为大多数算法都是存在误差的。但是这也是一种有效的方案。这里可以使用3D CNN,但是要注意选择局部卷积的维度。
数据方案:处理角度-距离-速度-幅值构成的热图。一般而言,雷达标签较难获得,点云的分割标签较多,因此,可以将点云坐标转化回雷达标签,将指定范围的设置为某一类别,未设置的范围设为背景。
网络结构:先使用3D-CNN在不同感受野取特征,形成比输入维数多一的张量;transformer通过较小的参数实现了全局的连接,可以用在通道级别,降低参数量,也可以用在patch级别,补充CNN的不足;由于特征通道具有不同的局部特征,这些特征可能需要比CNN的感受野更大的区域交互,因此,针对3D-CNN的大量参数,在一定感受野形成的特征通道并行的使用transformer,降低参数量。
创新点:使用3D-CNN处理雷达信号;加入transformer;
4.2.3 方案三:点云级
与方案二相同,不过方案二使用了雷达热图,而方案三使用了点云信息。点云和热图的区别在于,热图的信息密度较高,有些不存在目标的点,同样具有一定的幅值,这是因为杂波的存在。而点云经过CFAR处理,将杂波滤除,只留下以一定置信度存在的点,这些点是稀疏的。点云不以图的形式(长宽高对应的像素点强度)表示,而是将对应的坐标按照集合的方式放在一起。点云具有更高的信息密度,可以以更快的速度进行处理,但是,在CFAR处理的过程中因为存在一定的置信度,类似于模式识别分类的结果总会有一定的风险或者代价,因此会引入一定的信息丢失。因此,方案二优于方案三。
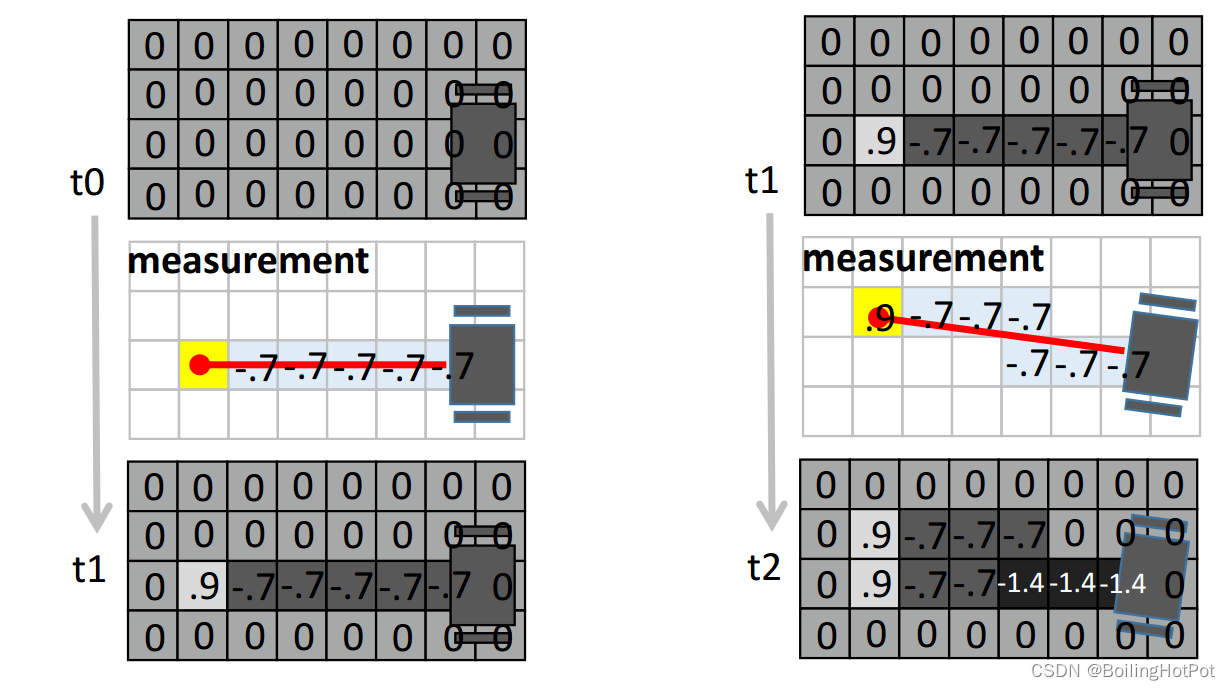
点云图像有两种形式,一种是集合,另一种是占据栅格地图(occupancy grid)。栅格图如下图所示,图中数字代表存在物体的概率,这种图可以通过CNN进行处理。
点云虽然数据量更少,但是数据不规则,很难并行加速,因此点云速度不如占据栅格图,但是点云数据准确度更高。
4.2.4 方案四:MUSIC算法生成图
此外,在看论文过程中,发现了没有人使用基于MUSIC算法生成的高精度测角-幅值信息来对目标进行识别。MUSIC算法生成的测角信息相比于半波束点具有更高的精度。但是,由于MUSIC算法无法将角度和距离进行关联,导致仅使用角度-幅值信息进行识别虽然有可能画出轮廓,但是容易被不同距离的目标遮挡,因此,并不是一种理想的方案。
4.3 雷达数据集
4.3.1 Oxford Radar RobotCar
窄波束发射,机械雷达。使用Navtech CTS350-X 毫米波调频连续波 (FMCW) 扫描雷达,在所使用的配置中提供 4.38 cm 的距离分辨率和 0.9 度的旋转分辨率,范围高达 163 m。
项目地址:https://oxford-robotics-institute.github.io/radar-robotcar-dataset
数据形式为方位-距离-幅值, 有连续时间序列,有可见光图像数据
缺点:无速度信息,无标签
4.3.2 COLORADAR
MIMO雷达,具有转化好的方位-俯仰-距离-速度-幅值图。
项目地址:https://arpg.github.io/coloradar/
项目论文:https://arxiv.org/abs/2103.04510
缺点:无标签
4.3.3 PandaSet
[x, y, z, i, t, d]为[x坐标,y坐标,z坐标,强度,时间,设备号]. 有分割标签.
缺点:无速度信息,无热图信息
项目地址:https://scale.com/resources/download/pandaset
4.3.4 RADIATE
有标签。雷达可以探测到俯仰-方位-距离-幅值图。但是数据集中无俯仰角。
缺点:雷达肯定无速度信息,激光雷达也可能没有速度信息
项目地址:http://pro.hw.ac.uk/radiate/
4.3.5 MulRan
缺点:无速度;只提供方位和距离。
4.3.6 CARRADA
缺点:距离-方位和距离-速度分为两个图,两者没有置于一个cube中
4.3.7 RaDICaL
缺点:距离-方位和距离-速度分为两个图,两者没有置于一个cube中
4.3.8 RadarScenes
缺点:缺少回波强度信息;只有方位角,而没有俯仰角;只有点云信息;
项目地址:https://radar-scenes.com/
4.3.9 CRUW
缺点:只有方位和距离;
4.3.10 nuScenes
方位-距离-速度-幅度
缺点:只有点云信息
4.3.11 UMA-SAR
缺点:只有点云数据
4.3.12 SCORP
方位-距离-速度-幅值,具有标签。
https://drive.google.com/drive/folders/1-IQ16x8G4T6rpSefHG8c4a7a0ibA9NkC
4.3.13 SeeingThroughFog
5 雷达干扰对抗
干扰就是通过某些手段使敌方雷达无法探测己方或欺骗敌方雷达给其假位置。干扰对抗则是识别敌方干扰的过程。
5.1 干扰的流程
侦收系统截获、分析电磁环境中的雷达发射信号,测量其频率、方向、重频、扫描周期、 脉冲调制方式等参数,并在整个对抗过程中实时关注雷达的信号变化; 决策控制系统根据侦收到的雷达信号确定雷达威胁等级并进行干扰决策,控制干扰系统参数,分配干扰资源; 评估系统在干扰过程中监视和评估干扰效果,调整干扰样式和资源分配。
5.2 抗干扰的流程
感知-决策-评估进化。
雷达对干扰信号的感知分为检测、参数测量、分类识别三个步骤。雷达感知干扰信号的重点是干扰特征分析和干扰识别。
抗干扰措施决策调度是智能抗干扰的核心难题,一般采用专家系统动态调整雷达工作参数。
抗干扰的评估进化是目前智能抗干扰的薄弱环节,理想情况下,要在交战中学习并实时反应。即使在作战过程中,也能识别未知的敌方干扰信号,然后实时生成有效的对抗措施,这依赖于基于博弈论的雷达抗干扰综合评估。















 3605
3605











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











