







一、放缩技巧
技巧1

例题
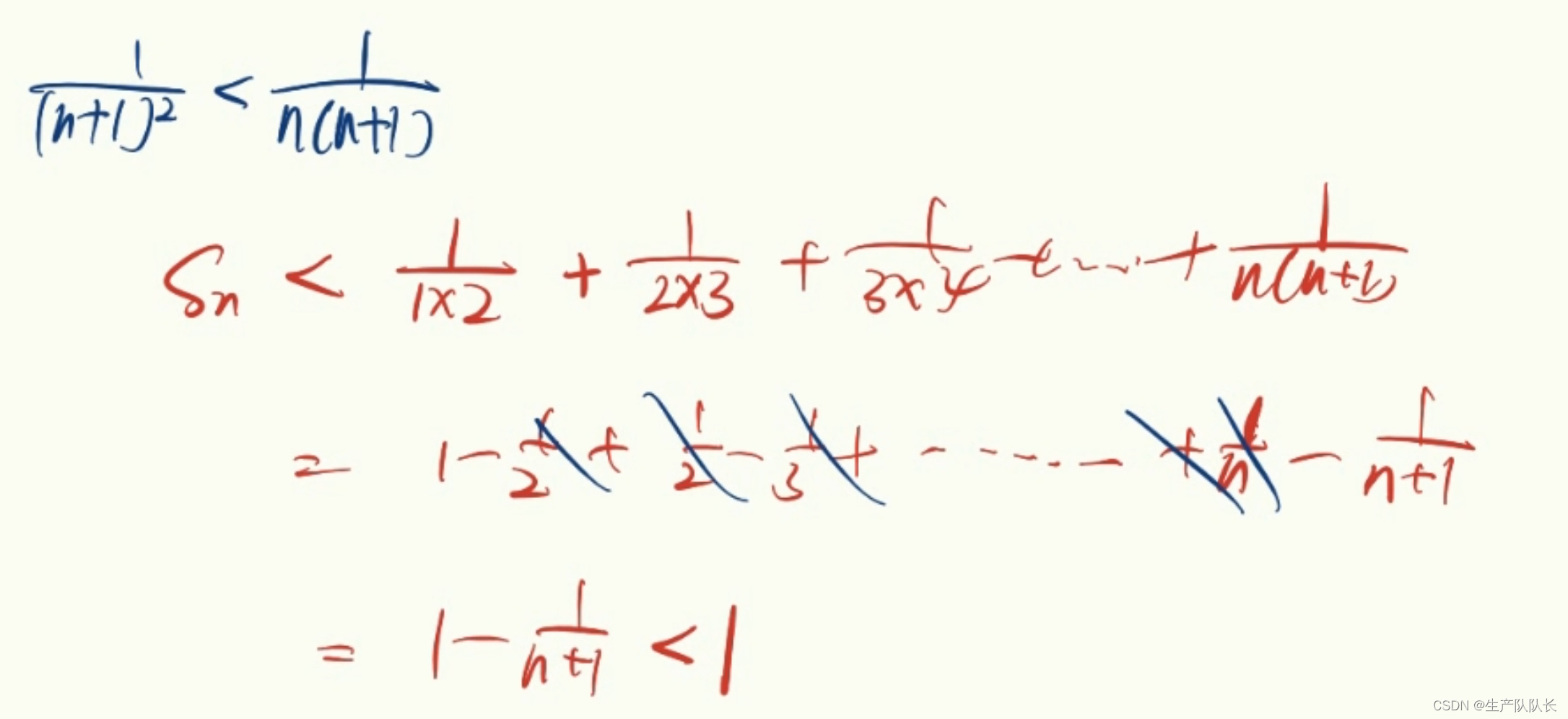
证明:Sn<1

解:
变形

解:
由于第一种情况,我们证明了Sn<1,n≥1,是从第一项就开始放缩的。
发现,无法精确到
3
4
\frac{3}{4}
43
这时,我们就从第二项开始放缩,最终得解。
如果第二项不行,从第三项。以此类推。最终可得解。

总结
本题,我们知道前两项和是
1
4
+
1
9
=
13
36
\frac{1}{4}+\frac{1}{9}=\frac{13}{36}
41+91=3613
那么,我们可以将题目改成
S
n
<
23
36
S_n<\frac{23}{36}
Sn<3623
这个时候,放缩,就要从第三项开始放缩。
技巧2
在1的基础上,提高放缩精确度。
利用平方差公式,进行放缩。

例题
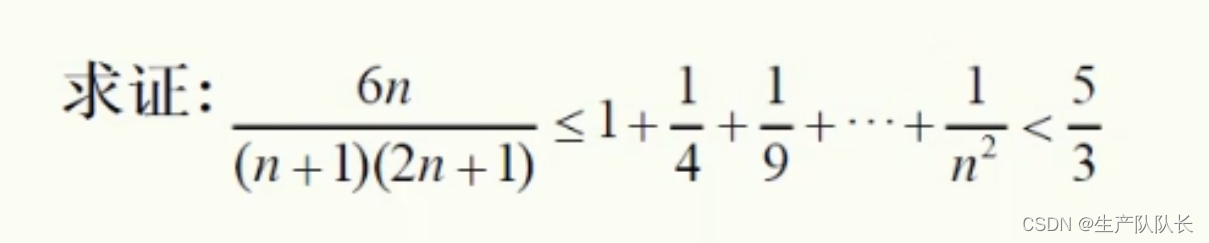
解析:
这里有两个不等号,所以,要证明两次
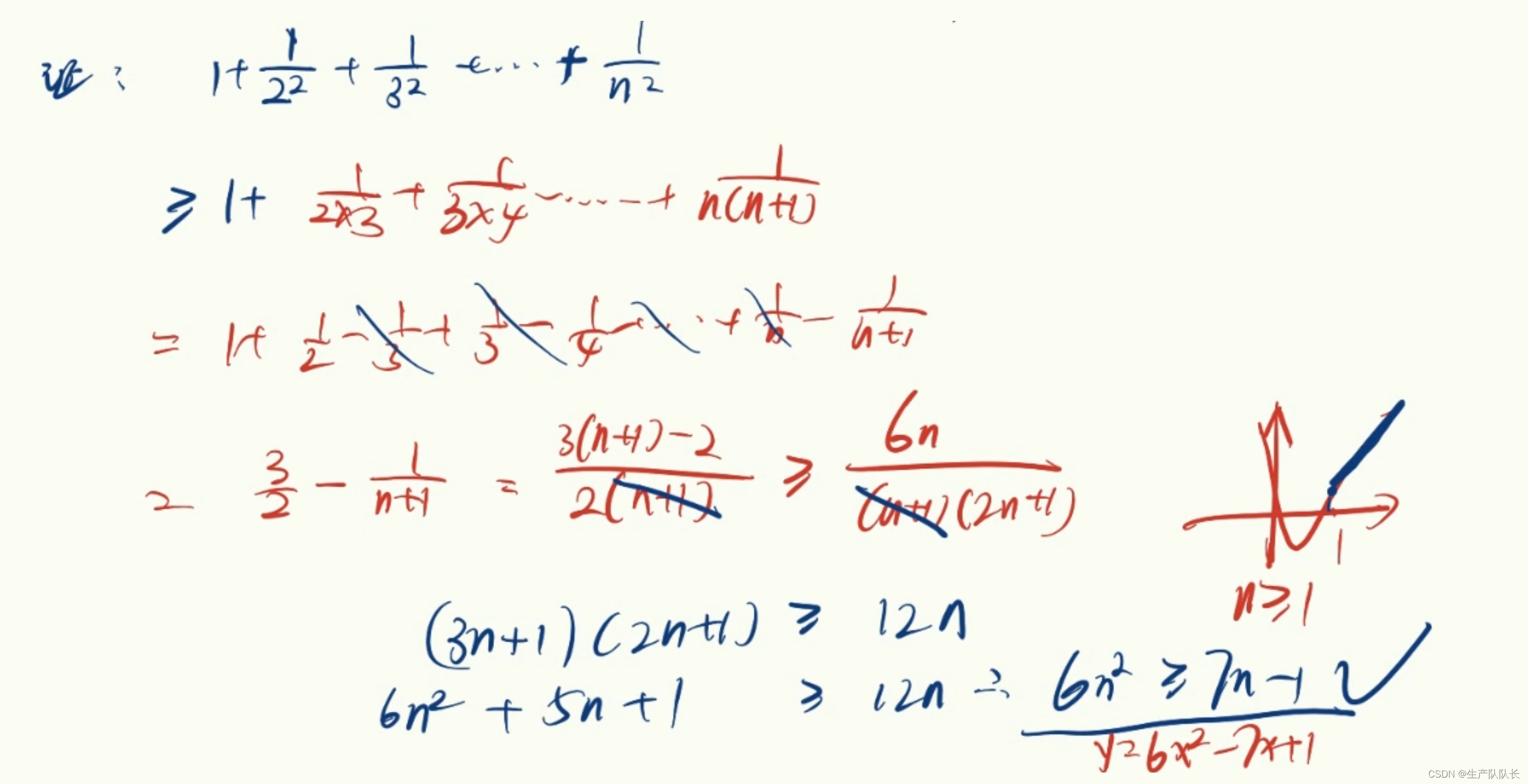
对于,左边的不等号,我们可以采用技巧1的方式
放缩后,结合二次函数的性质,求出单调性发范围,从而得证
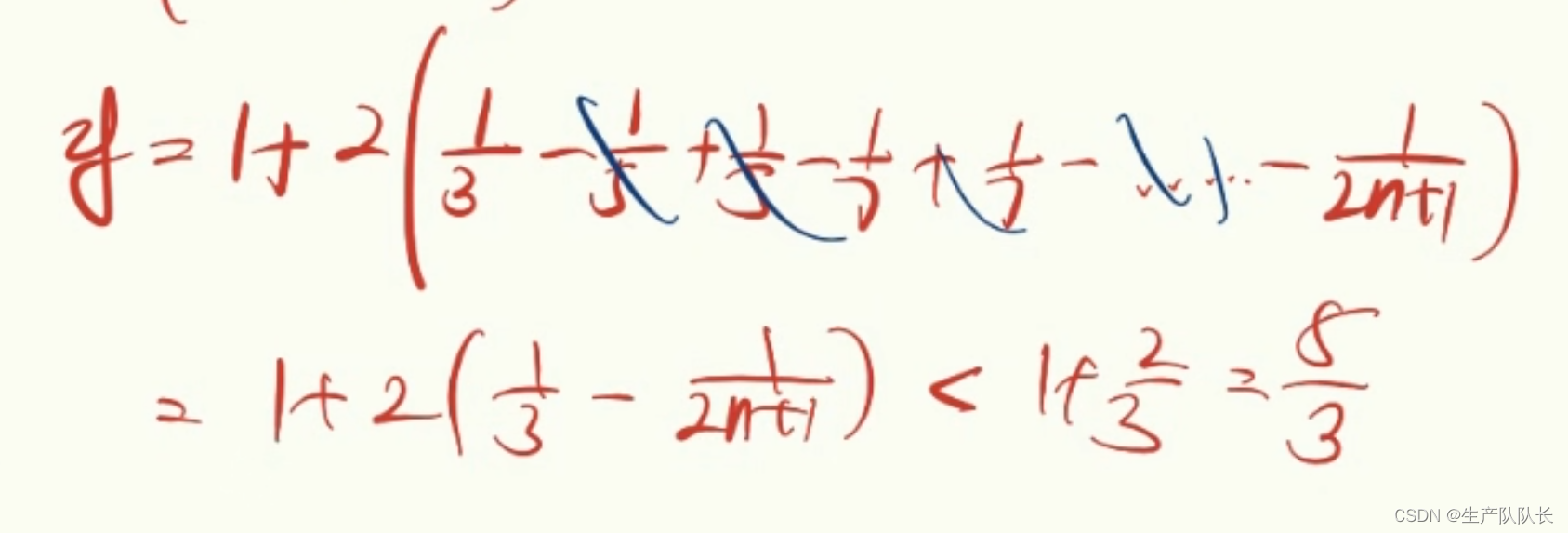
而对于,右边的不等号,我们采用技巧1,就不行了。
分析原因
技巧1中
n
2
>
n
∗
(
n
−
1
)
=
n
2
−
n
,可以看出,误差是一个
n
。
n^2>n*(n-1)=n^2-n,可以看出,误差是一个n。
n2>n∗(n−1)=n2−n,可以看出,误差是一个n。
那么,我们如何放缩了?
这里含有一个
n
2
n^2
n2,所以,我们可以想到平方差公式,写成两项乘积的形式
从而,可以使用裂项求和法。
可以这样放缩
4
4
n
2
=
4
2
n
∗
2
n
<
4
4
n
2
−
1
=
4
(
2
n
−
1
)
(
2
n
+
1
)
\frac{4}{4n^2}=\frac{4}{2n*2n}<\frac{4}{4n^2-1}=\frac{4}{(2n-1)(2n+1)}
4n24=2n∗2n4<4n2−14=(2n−1)(2n+1)4
或者
1
n
2
<
1
n
2
−
1
=
1
(
n
−
1
)
(
n
+
1
)
\frac{1}{n^2}<\frac{1}{n^2-1}=\frac{1}{(n-1)(n+1)}
n21<n2−11=(n−1)(n+1)1
这两种放缩方式,都可以解决第二个不等号
放缩技巧都是利用平方差公式
放缩原则:减小误差范围。单项,从误差为n,降到误差为常数C
左边不等号
右边不等号

换放缩方案

从第二项开始放缩:
总结
上面,我们试了4中放缩方式,现在来说明一下他们之间的精确度
比较他们的大小关系如下:
1
n
2
−
n
>
1
n
2
−
1
>
4
4
n
2
−
1
>
1
n
2
\frac{1}{n^2-n}>\frac{1}{n^2-1}>\frac{4}{4n^2-1}>\frac{1}{n^2}
n2−n1>n2−11>4n2−14>n21
可以发现
4
4
n
2
−
1
\frac{4}{4n^2-1}
4n2−14
距离
1
n
2
\frac{1}{n^2}
n21
更近,所以,这个放缩更精确。
以此类推
二、数列不等式放缩原则
1、提高放缩通项公式的精确度。
2、从后几项开始放缩。


















 3153
3153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









