







准备
1ubuntu 20.04系统
VM16pro虚拟机软件
2.首先配置好ROS环境和Rviz环境
ROS:
ROS环境配置
Rviz
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install build-essential
sudo apt-get install ros-noetic-rviz
//打开新终端输入:
roscore
//打开新终端输入:
rviz
//测试rviz是否正常启动
Rviz如下界面
配置网络接口
1.查看自己的以太网卡
以联想为例

2.打开虚拟机软件左上角的编辑
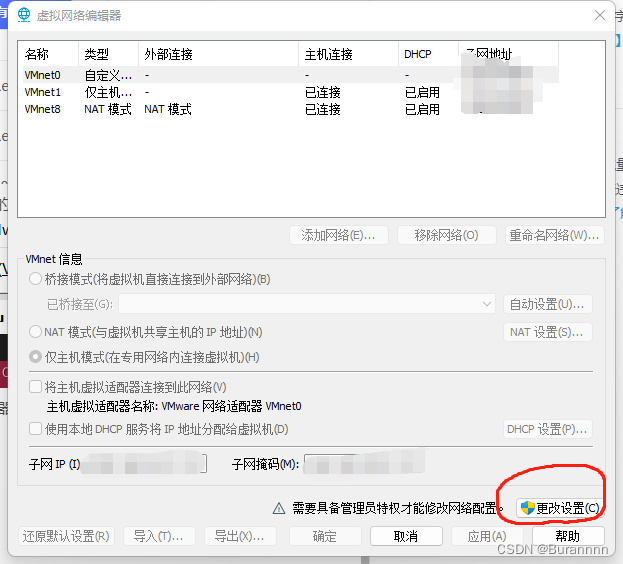
3.点击下面有虚拟网络配置器,点进去
然后点击更改设置
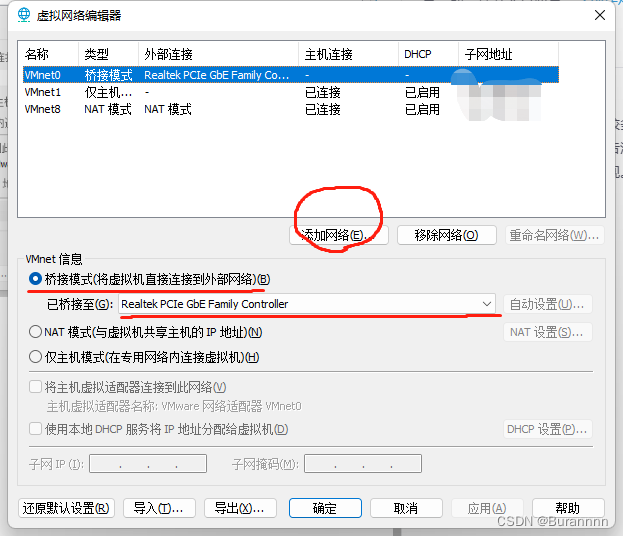
4.点击添加网络,然后把新添加的网络设置为桥接模式,然后选择刚刚查看的以太网卡,就像我这里的VMnet0一样,然后点击应用,点击确定。
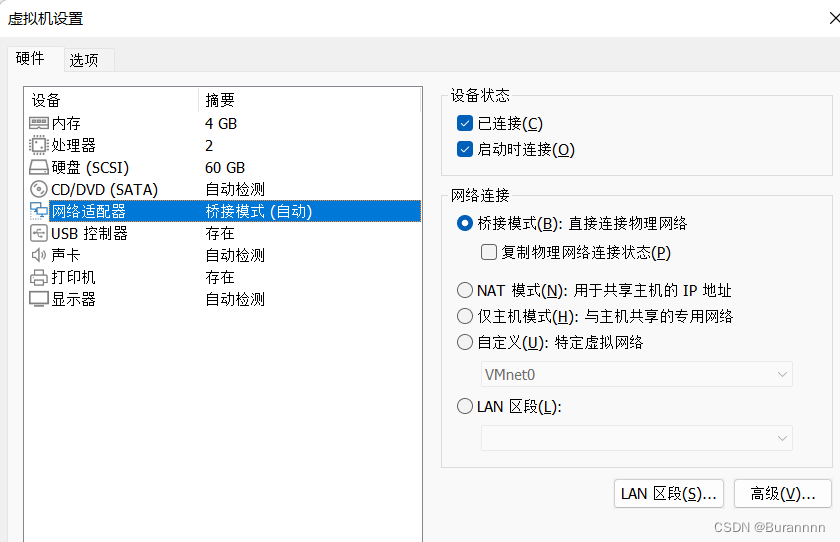
5.退出来之后点击虚拟机,里面点击设置,
6.更改网络适配器为桥接模式,不要点击复制物理网络链接状态!!
然后点击确定。
7.找到虚拟机的设置,点击网络,然后点击这个+号,在里面配置ip地址

8.选择IPv4,然后选择手动,输入如下IP地址。(ip地址可以和我不一样,但是不要使用192.168.1.201,这个时velodyne的地址,占用之后就连不上了)。然后点击添加
这里的网关暂时设置为192.168.1.1,后面登录到velodyne后再修改。

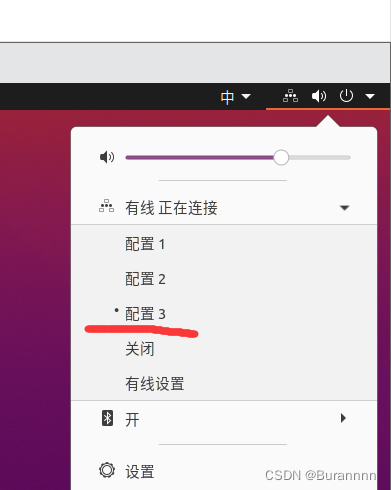
9.点右上角在里面选择刚刚配置好的ip地址
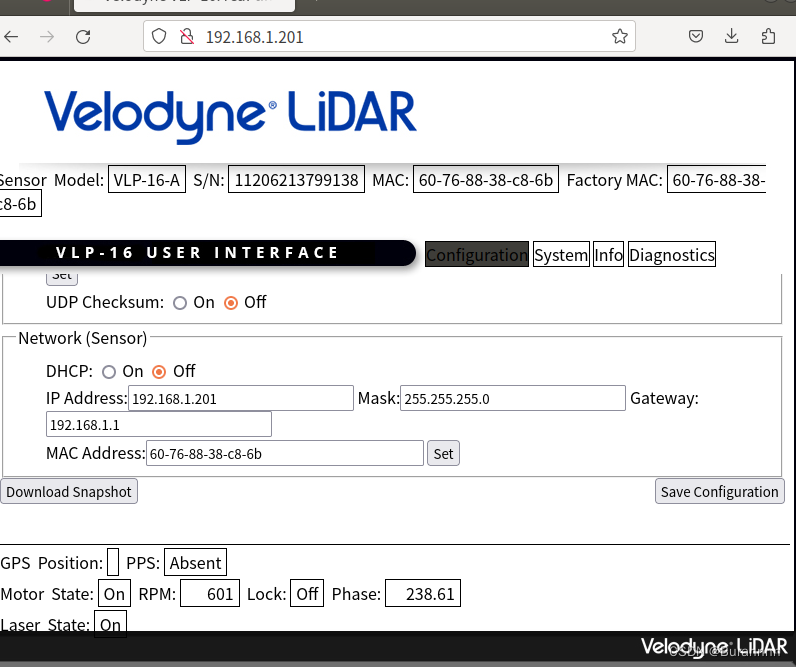
10.打开网页输入,出现如下界面,说明电脑和Velodyne已经通过以太网接口进行通信
192.168.1.201
这里下拉找到Gateway 192.168.1.1 确认是否与我们之前设置的网关地址一致,否则,后面连接velodyne的时候会时断时续,甚至还会关闭网络连接。
配置velodyne环境
16.04对应kinetic版本
18.04对应melodic版本
20.04对应noetic版本
sudo apt-get install ros-kinetic-velodyne
sudo apt-get install ros-melodic-velodyne
sudo apt-get install ros-noetic-velodyne
//自行修改
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro noetic -y
catkin_make
1.打开新终端输入
//每次使用激光雷达都要在cankin_velodyne文件夹下执行一次
cd catkin_velodyne
source devel/setup.bash
roslaunch velodyne_pointcloud VLP16_points.launch
见到如下界面表示启动成功,
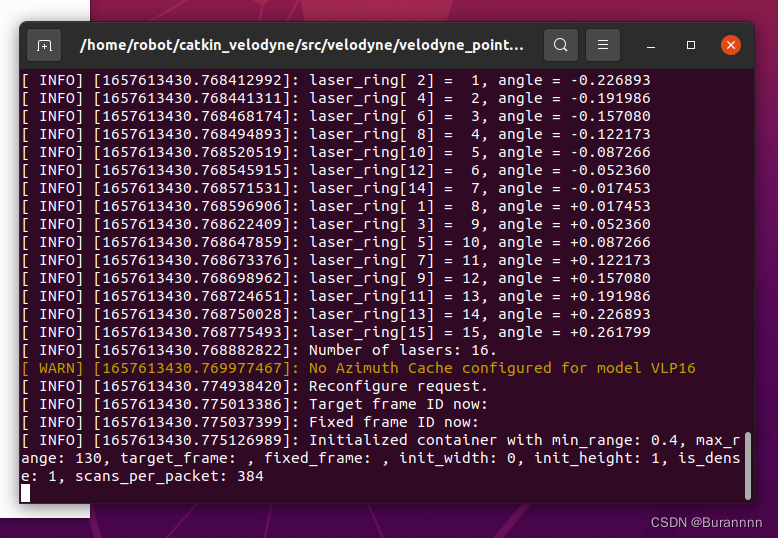
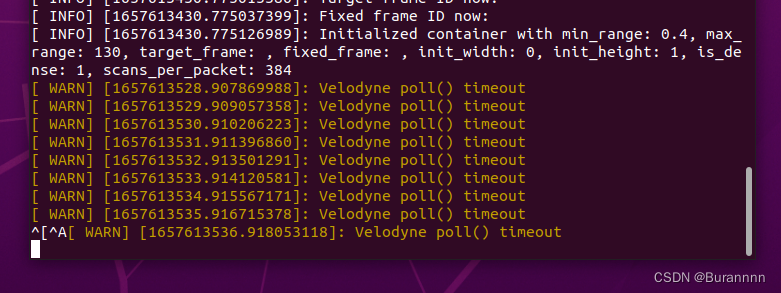
(如果网络断开连接之后就会提示warn time out之类的),手动连一下就行,点击右上角,然后选择配置好的ip地址
打开新终端可以查看节点
rosnode list
打开新终端,也可以订阅主题
rostopic echo /velodyne_pionts
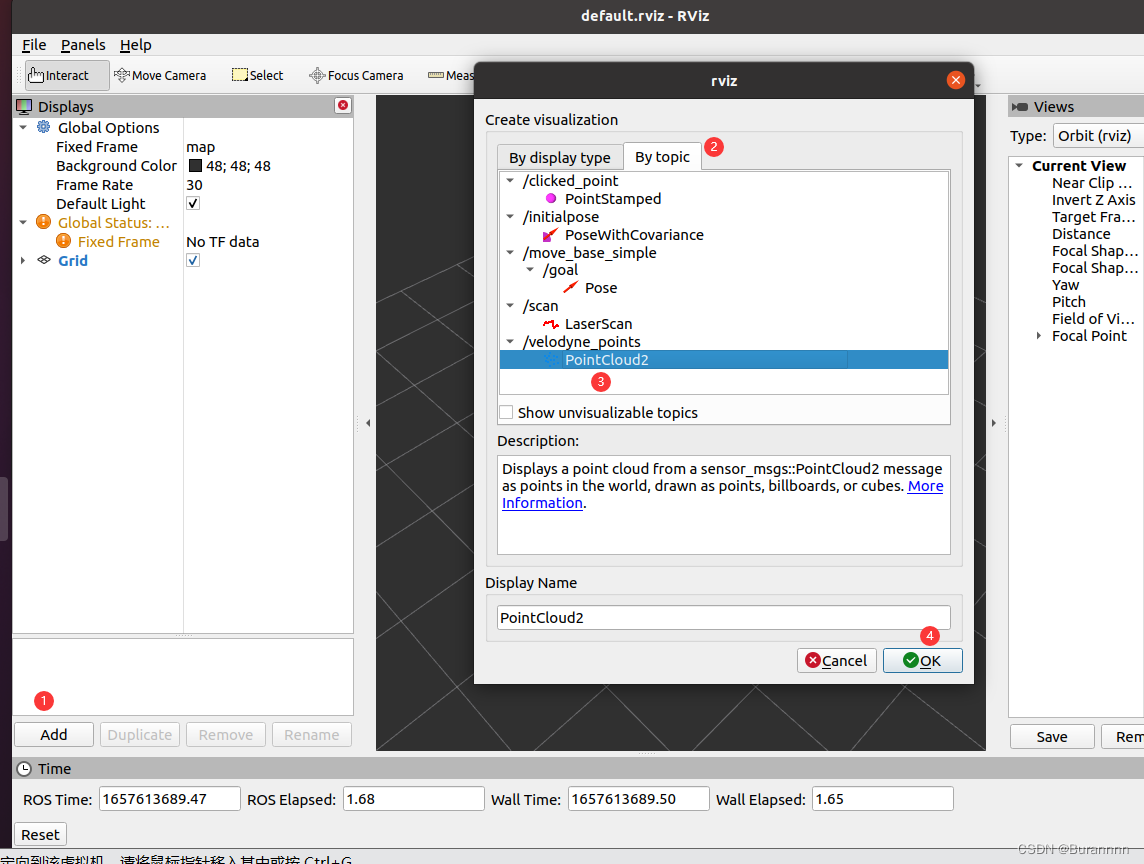
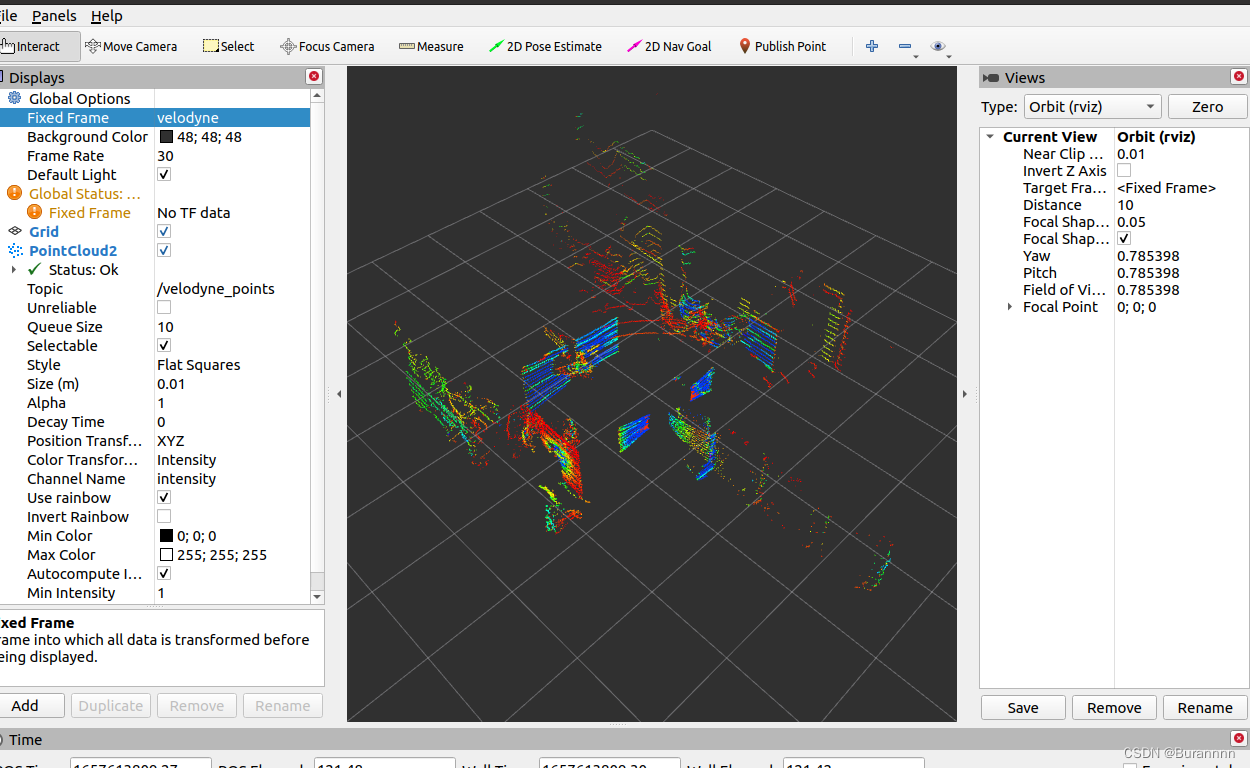
- 打开新终端,输入rviz,按照如下步骤添加激光雷达点云
3.然后再Fixed Frame 这里把map修改为velodyne,然后回车
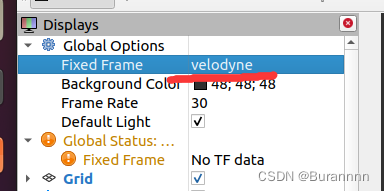
4.然后这个激光点云就有了














 807
807











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









