







通过三天的痛苦挣扎终于调通了mpu以及移植好了dmp库
一开始动手使用mpu6050的时候移植了一个例程想试下效果
不曾想调用dmp的时候就出错了,然后尝试了各种方法试图定位
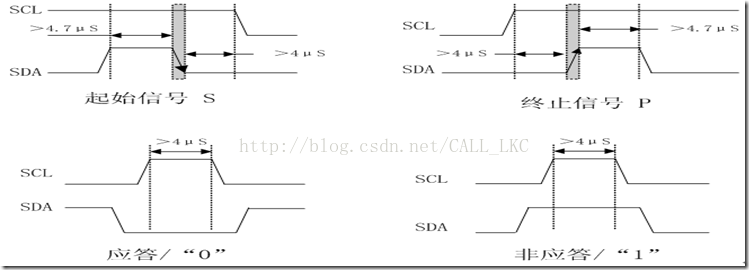
错误,一开始怀疑模拟IIC有问题,然后仔细核对了一下IIC的时序
例程程序:
//MPU IIC 延时
void MPU_IIC_Delay(void)
{
delay_us(2);
}
//产生II起始信号
void MPU_IIC_Start(void)
{
MPU_SDA_OUT();
MPU_IIC_SDA=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SDA=0;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
} 可以发现延时有点不对,可以对照时序图
然后以为是时序问题,就索性自己写的模拟IIC程序代替了,结果还是不行,排除时序问题,实际上例程这么写是为了加快读取数据的速度,
然后自己便尝试了硬件iic读取mpu6050的数据,看代码
#include "delay.h"
#include "IICMPU.h"
//初始化IIC
void MPU_IIC_INIT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
I2C_InitTypeDef I2C_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C ;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 50000;
I2C_Init(I2C1, &I2C_InitStructure);
I2C_Cmd (I2C1,ENABLE);
I2C_AcknowledgeConfig(I2C1, ENABLE);
}
/*********写一个字节到寄存器
REG_Address 几首数据的iic设备寄存器的地址
REG_data 待写入的数据******************************/
void I2C_ByteWrite(uint8_t REG_Address,uint8_t REG_data)
{
I2C_GenerateSTART(I2C1,ENABLE);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(I2C1,SlaveAddress,I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
I2C_SendData(I2C1,REG_Address);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_SendData(I2C1,REG_data);
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_GenerateSTOP(I2C1,ENABLE);
}
/*************?MPU6050读一个字节**********************************/
uint8_t I2C_ByteRead(uint8_t REG_Address)
{
uint8_t REG_data;
while(I2C_GetFlagStatus(I2C1,I2C_FLAG_BUSY));
I2C_GenerateSTART(I2C1,ENABLE);//起始信号
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(I2C1,SlaveAddress,I2C_Direction_Transmitter);//发送设备地址+写信号
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));//
I2C_Cmd(I2C1,ENABLE);
I2C_SendData(I2C1,REG_Address);//发送储存单元,从0开始
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_GenerateSTART(I2C1,ENABLE);//起始信号
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(I2C1,SlaveAddress,I2C_Direction_Receiver);//发送设备地址+读信号
while(!I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
I2C_AcknowledgeConfig(I2C1,DISABLE);
I2C_GenerateSTOP(I2C1,ENABLE);
while(!(I2C_CheckEvent(I2C1,I2C_EVENT_MASTER_BYTE_RECEIVED)));
REG_data=I2C_ReceiveData(I2C1);//读出数据寄存器
return REG_data;
}
//mpu初始化
void InitMPU6050(void)
{
I2C_ByteWrite(PWR_MGMT_1,0x00);//解除休眠状态
I2C_ByteWrite(SMPLRT_DIV,0x07);//采样频率125hz
I2C_ByteWrite(CONFIG,0x06);//
I2C_ByteWrite(GYRO_CONFIG,0x18);//陀螺仪量程设置+-2000deg/s,灵敏度16.4LSB/led/s
I2C_ByteWrite(ACCEL_CONFIG,0x01);//加速度传感器量程设置+-4g,灵敏度8190LSB/g
}
/*******************获取数据*******************************/
unsigned int GetData(unsigned char REG_Address)
{
char H,L;
H=I2C_ByteRead(REG_Address);
L=I2C_ByteRead(REG_Address+1);
return (H<<8)+L; //合成数据
}
就这样排除了IIC的问题,直接把问题指向mpu初始化配置
通过分析终于找到了问题所在,直接看图
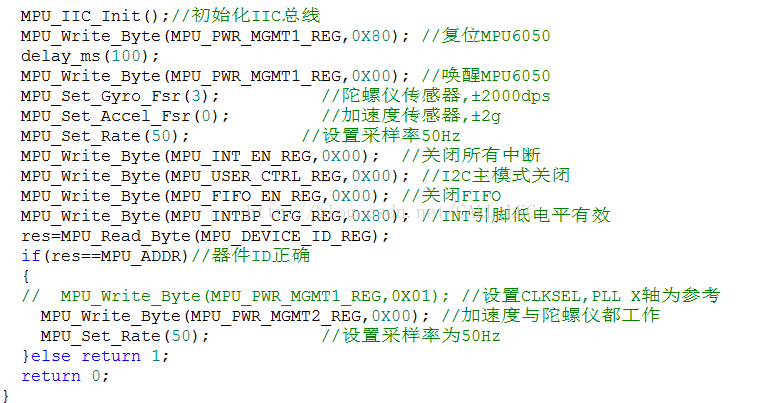
看注释的那条语句,注释掉就可以完美运行,直接使用默认的时钟,但是这样势必加大了最后的出欧拉角的误差。
至于为什么在注释这条语句就会到至错误我自己也想不大明白,如果有读者发现了问题,希望交流交流,
通常情况下DMP库的自检也会导致一些错误,看图
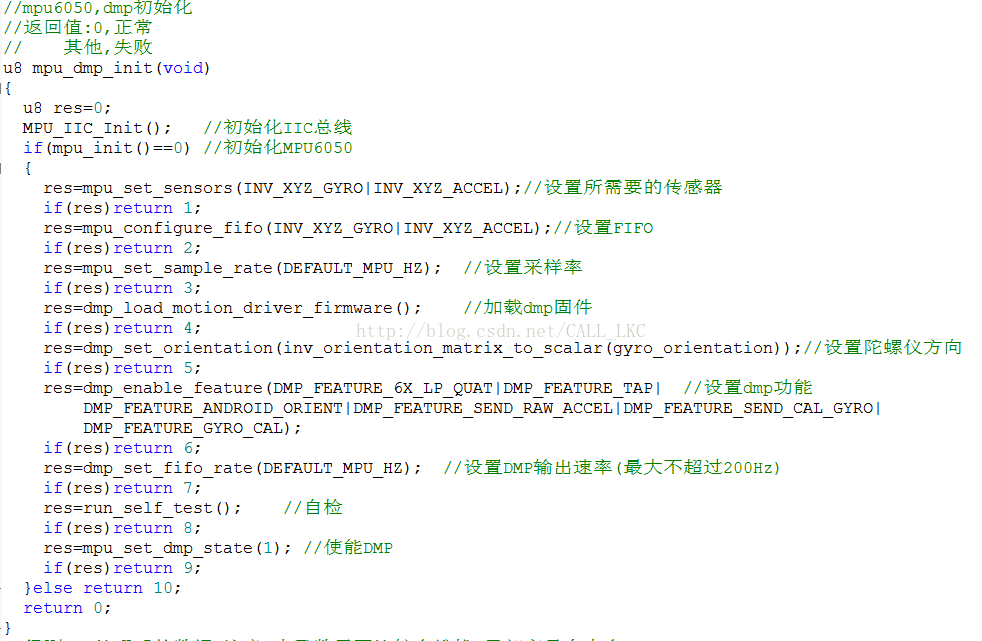
可以尝试注释掉自检;对于自检函数,我们打开来看看里面到底是什么
u8 run_self_test(void)
{
int result;
//char test_packet[4] = {0};
long gyro[3], accel[3];
result = mpu_run_self_test(gyro, accel);
if (result == 0x3)
{
/* Test passed. We can trust the gyro data here, so let's push it down
* to the DMP.
*/
float sens;
unsigned short accel_sens;
mpu_get_gyro_sens(&sens);
gyro[0] = (long)(gyro[0] * sens);
gyro[1] = (long)(gyro[1] * sens);
gyro[2] = (long)(gyro[2] * sens);
dmp_set_gyro_bias(gyro);
mpu_get_accel_sens(&accel_sens);
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
dmp_set_accel_bias(accel);
return 0;
}else return 1;
}下面的文字应用某贴:
细心的人如果将它打开后会发现这里面实际也是一个校零程序,矫正三个方向的陀螺仪的零点漂移,第二个就是纠正重力方向,也就是开机时刻的加速度方向(通俗一点就是我们认为的水平方向)result = mpu_run_self_test(gyro, accel); 用于获得当前各轴的角速度和加速度,并且反馈芯片的状态。
mpu_get_gyro_sens(&sens); 这个就不用说了,用于获得角速度的计算比例;好戏在下头。
dmp_set_gyro_bias(gyro); 这个把开机当前的角速度计算完成后送到了DMP库
我们知道,对于运动,我们都要为其设立一个参考系,因为运动都是相对的,陀螺仪输出了值,这个值是相对与谁呢??我们在地球上,相对参考系当然是地面。假如我们在动车上做实验,陀螺仪输出的值是相对与谁呢??当然是动车!!!! 那为什么是动车呢?那我就告诉你,因为开机陀螺仪初始化的时候陀螺仪是相对火车静止的,故开机对谁静止,陀螺仪输出的值就是相对于谁的运动速率。
回到主题,DMP自检时刻保存了开机时的陀螺仪速率,其实就是让陀螺仪检测到的速率去除开机时刻的速率,自然得到了陀螺仪与开机时刻参考系的相对速率,也就是我们需要的有效值。这也就是抑制温漂的原理。
再来看看加速度重心的校准程序,与陀螺仪一样,均是修正相对参考系的速率和位置。但是加速度传感器不一样,只要传感器不动,其重力加速度方向是不变的,默认的是-Y是重力加速的的正方向。如果在模块非水平情况下进行了重力校准,那么-Y就不是重力方向了,为了得到无论模块处于什么状态是都需要—y是重力的正方向,我们就有这样的一个高大上的办法。那就是“不要对重力进行校准” 。
。
改掉源代码就是在使用accel_sens前加一行: accel_sens=0;使其重力校准失效!!!即可!!!
经修改后,模块的初始方位不再收开机时刻模块位置的影响,使用DMP一样需要8S左右的时间稳定,起码不用再担心开机需要去将小车扶正吧!(如果是其他用途,需要开机修正方位的程序,这样就不行了哟!目测比较少
要注意的就是修改以上的定义,如上图修改即可















 5749
5749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









