






系统环境
ubuntu20.04+ROS(noetic)
安装
sudo apt-get install ros-noetic-plotjuggler-ros使用
在需要播放bag包的情况下,需要启动roscore(如果只是看数据不需要roscore)
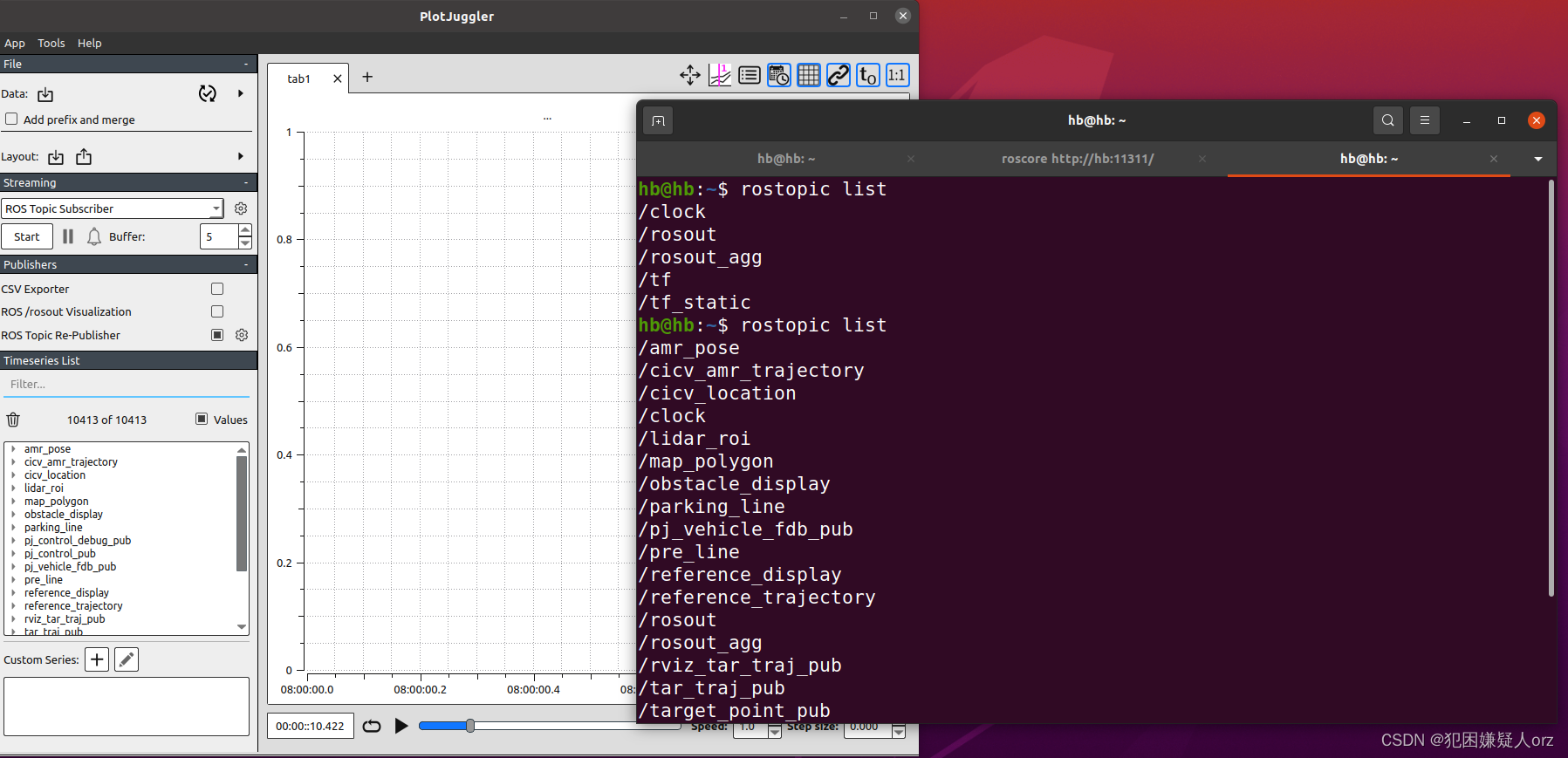
roscore启动plotjuggler
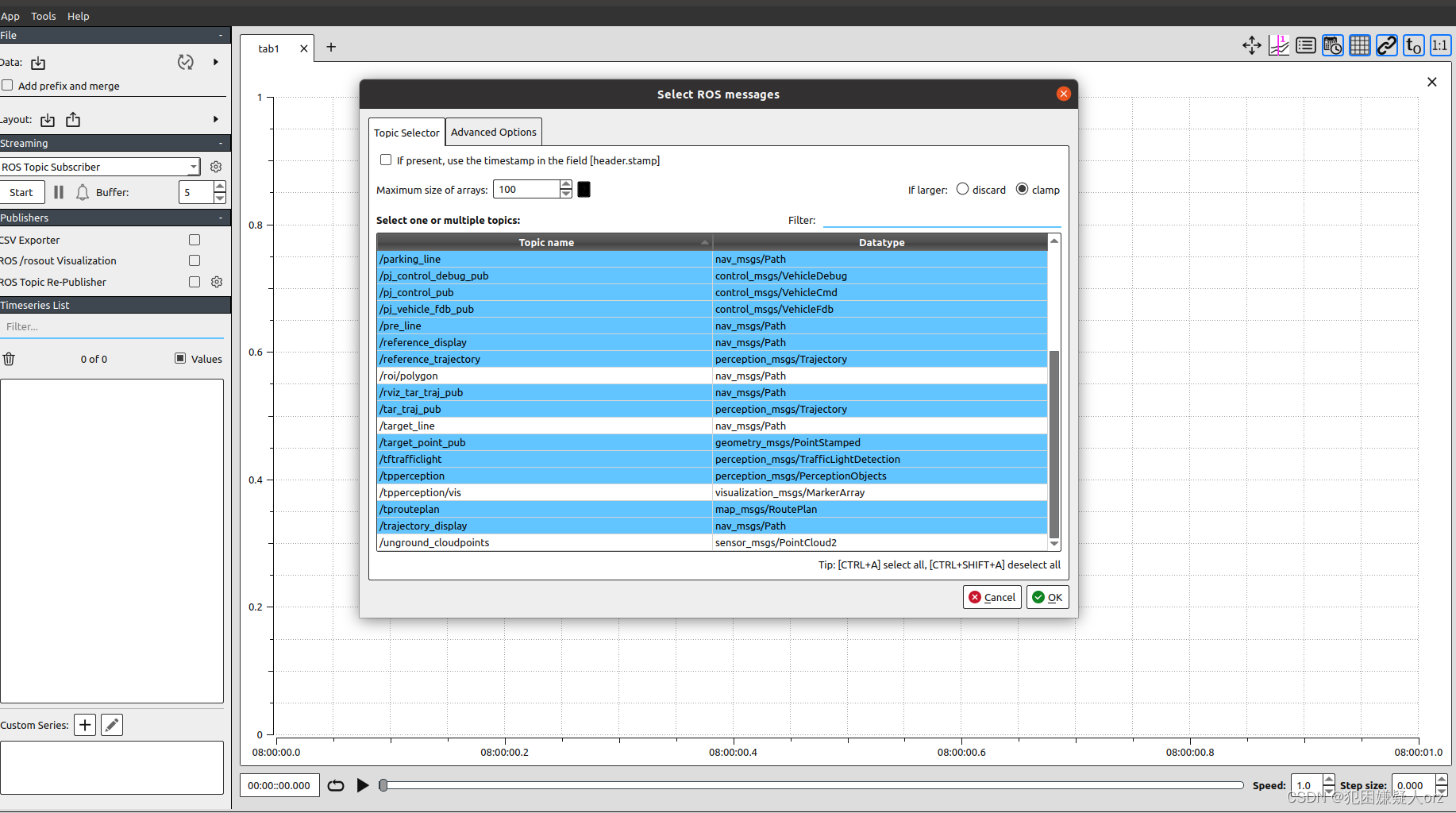
rosrun plotjuggler plotjuggler加载bag包
选择需要加载的话题内容
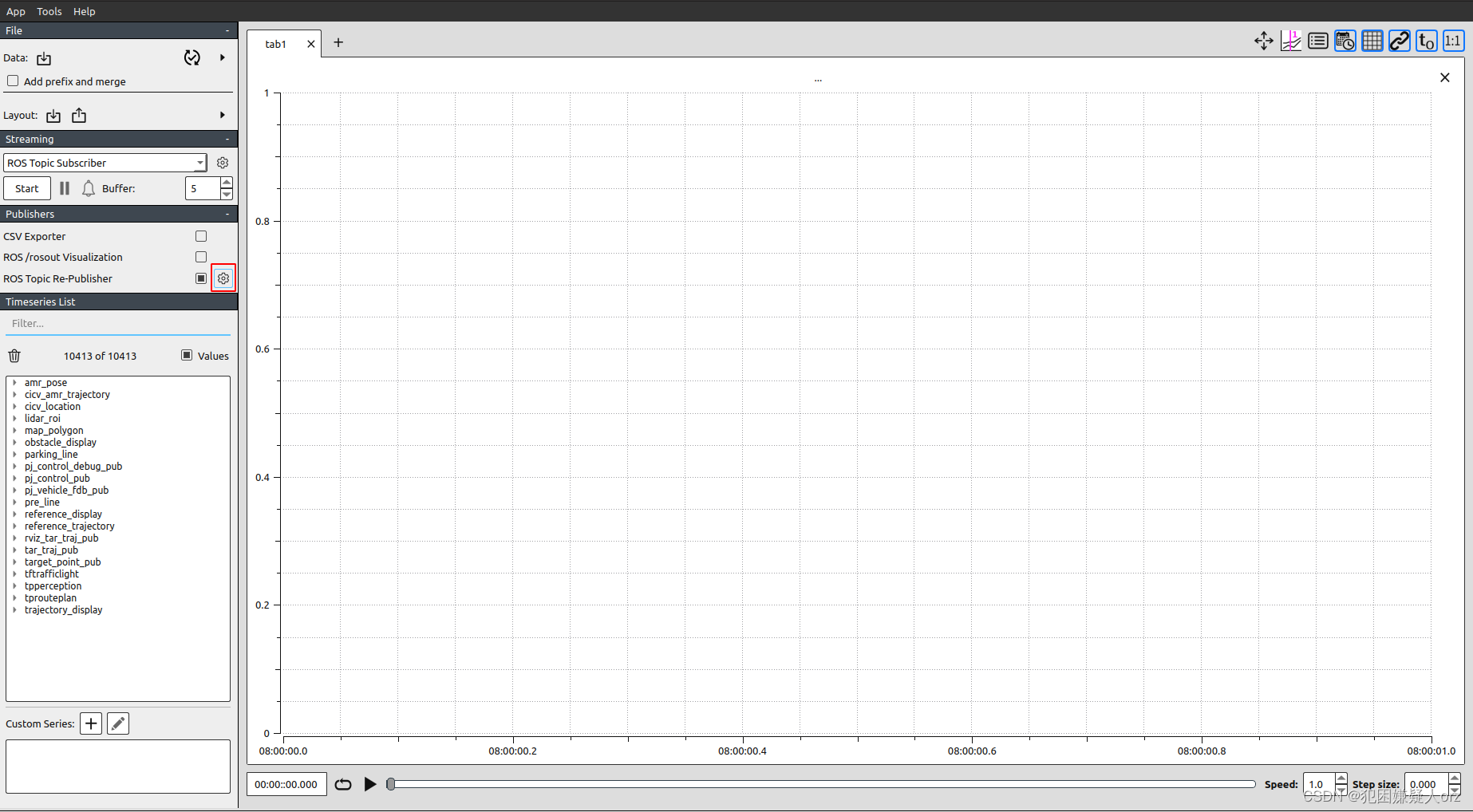
选择rosbag play过程中需要发布的话题(注意ROS Topic Re-Publisher需要选中,之后再点击右侧的设置按钮选择需要发布的话题)
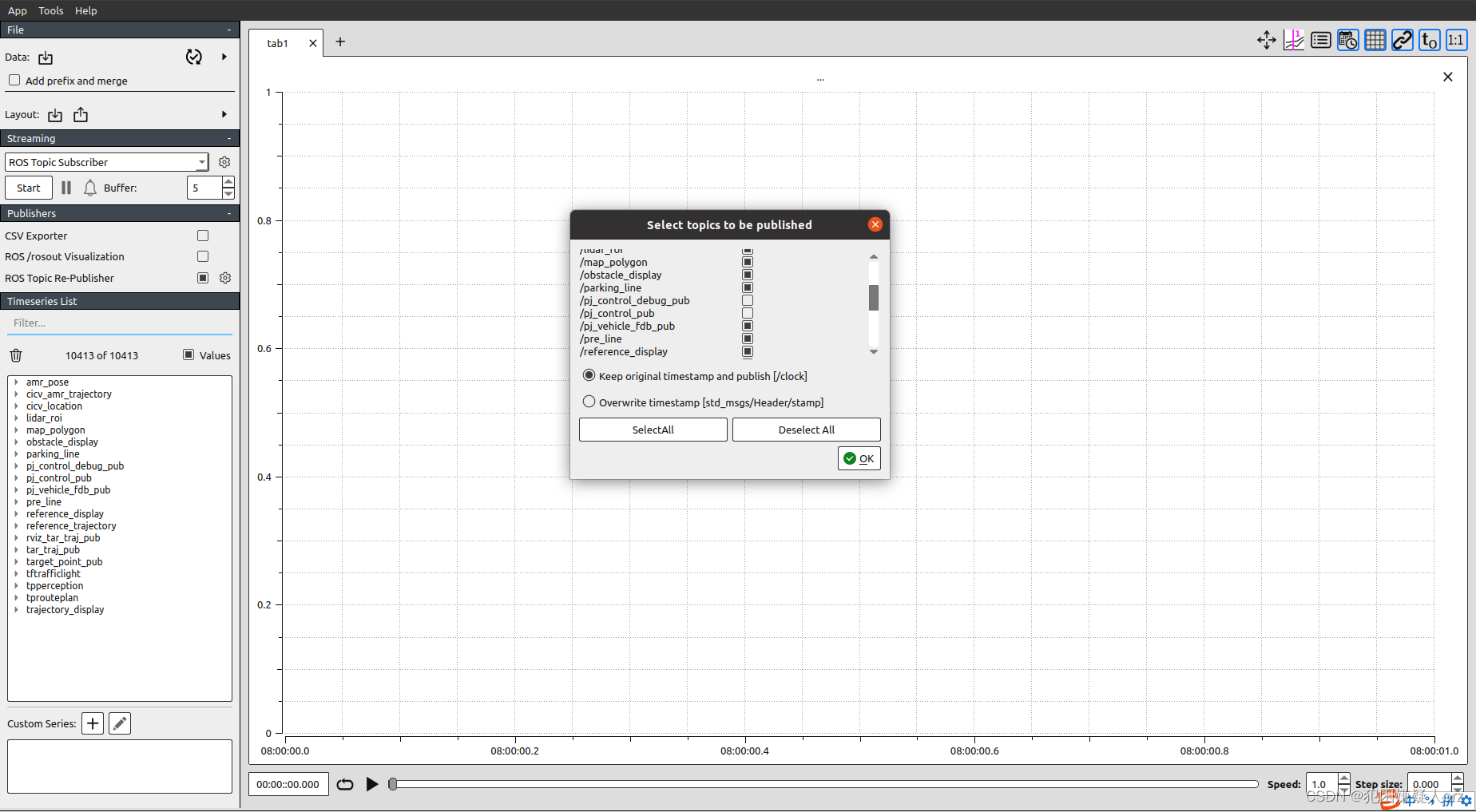
点击播放之后可以在终端中echo到播放的话题
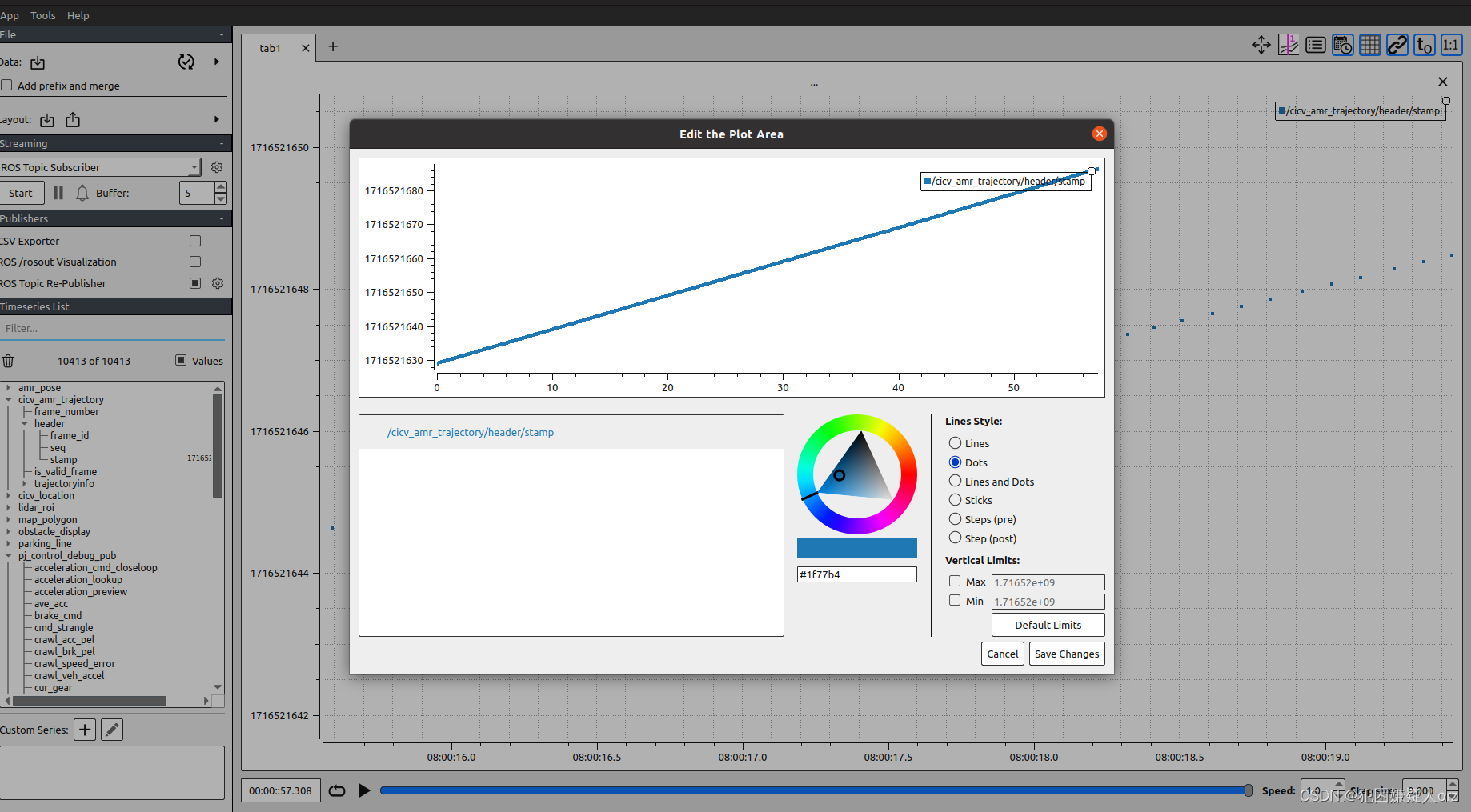
右下角可以设置播放的速度,其它功能可以自己尝试探索
【注】对于分析数据,有时候需要将线型设置为dots,否则有些数据丢帧的地方会看不出来















 6535
6535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









