






穿越机F4飞控F405代码pcb文件,原理图,源代码,穿越机无人机,F4V3飞控PCB资料,AD格式原理图、PCB图、Bo可直接打板,电子资料不退不换,
YID:763719166930350
727美好的一天

穿越机F4飞控F405是一种先进的飞控系统,具备强大的处理能力和丰富的功能。本文将重点讨论穿越机F4飞控F405的代码、PCB文件、原理图和源代码,以及相关的无人机技术。
- 穿越机F4飞控F405的代码
穿越机F4飞控F405代码是无人机飞行控制系统的核心部分。通过代码,可以实现无人机的各种飞行模式、姿态调整以及飞行器的稳定性控制。代码的编写需要考虑飞行器的硬件配置、传感器数据处理、算法计算等多个方面。
在穿越机F4飞控F405的代码中,常见的模块包括飞行控制模块、姿态传感器模块、飞行模式选择模块、通信模块等。飞行控制模块负责根据传感器数据和用户输入进行飞行器的控制;姿态传感器模块负责获取飞行器的姿态信息;飞行模式选择模块负责根据用户的选择切换不同的飞行模式;通信模块负责与地面站进行通信,传输飞行器的状态信息。
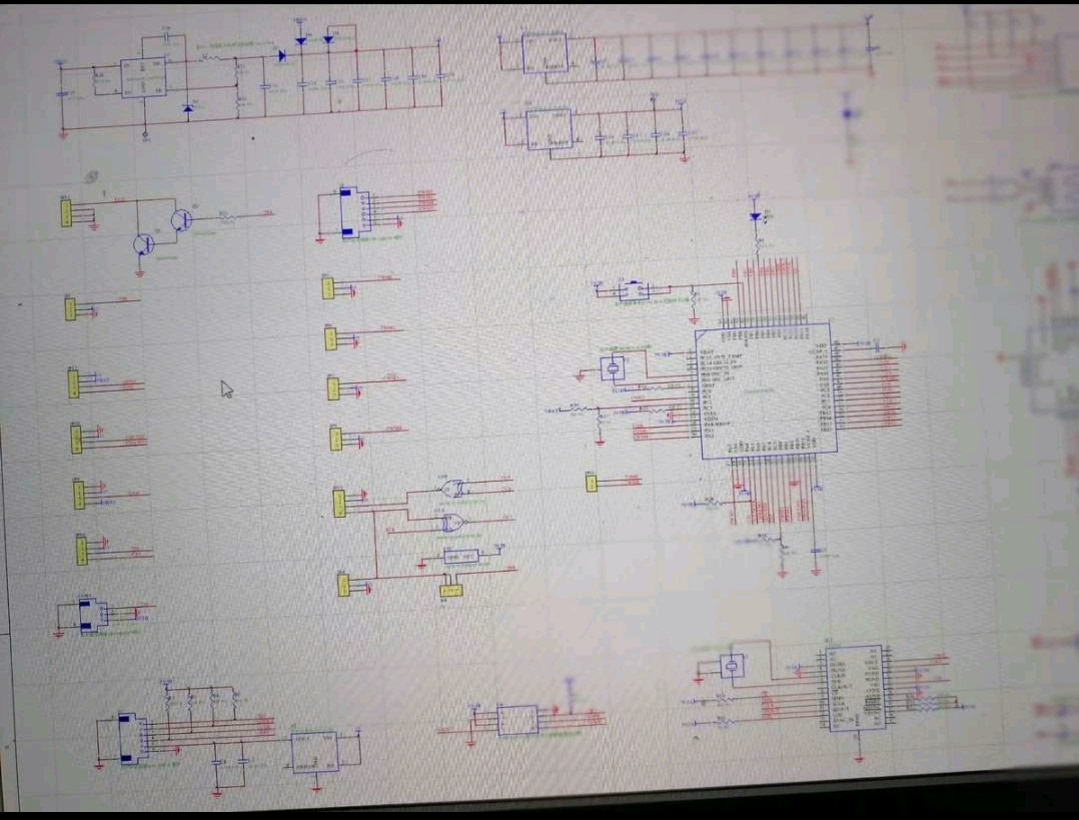
- 穿越机F4飞控F405的PCB文件和原理图
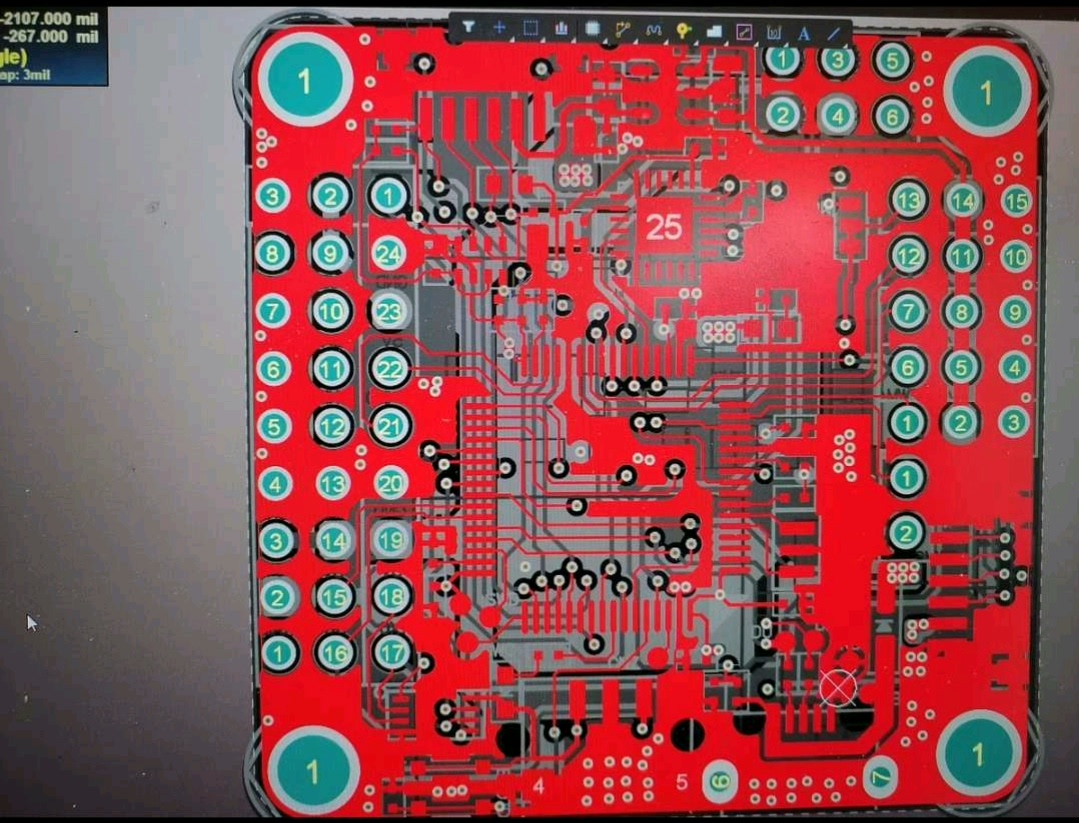
PCB文件和原理图是设计穿越机F4飞控F405硬件的关键文件。PCB文件描述了硬件电路板的布局和连接方式,原理图则展示了电路的各个组成部分和其连接关系。
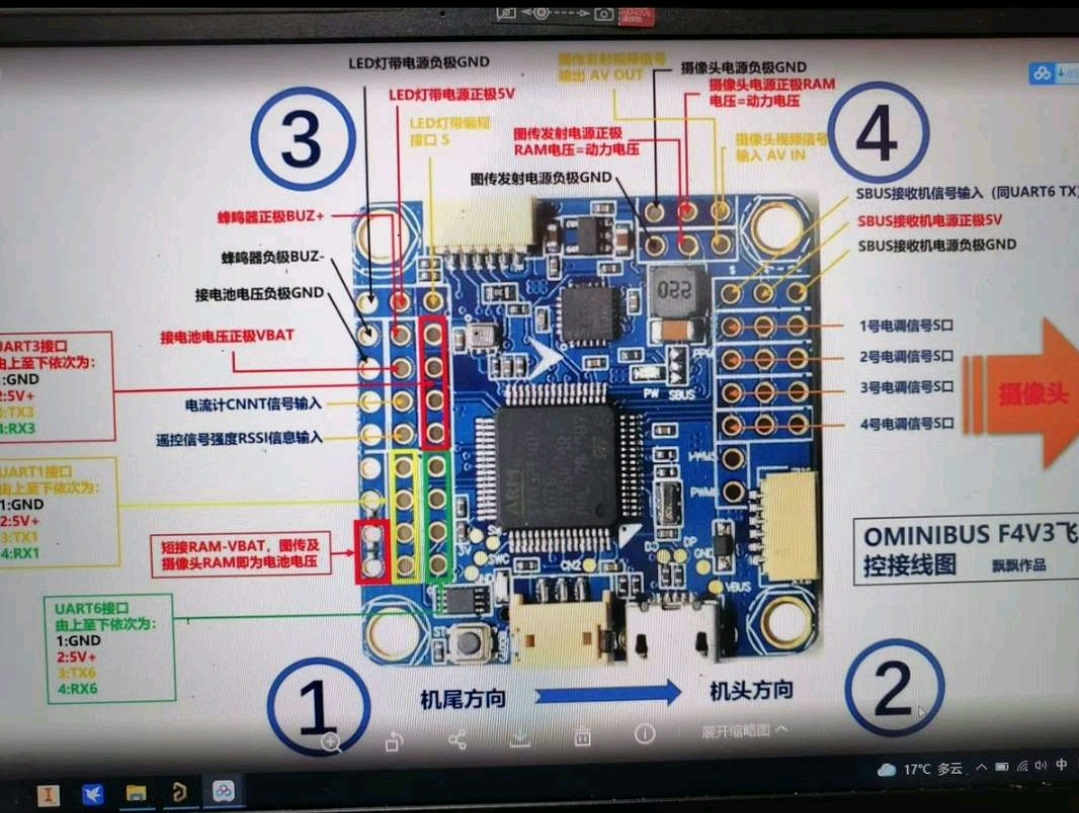
穿越机F4飞控F405的PCB文件中,常见的元件包括微处理器、电源管理模块、传感器接口、通信接口等。微处理器是飞行控制系统的核心部分,负责运行代码和控制整个飞行器的各个模块。电源管理模块则提供稳定的电源供给,确保飞行控制系统的正常运行。传感器接口负责连接飞行器的姿态传感器和其他传感器,获取飞行器的各种数据。通信接口则实现与其他设备的数据交换和通信。
- 穿越机F4飞控F405的无人机应用
穿越机F4飞控F405作为一款高性能的飞行控制系统,被广泛应用于无人机领域。无人机的应用场景包括航拍摄影、植保喷洒、物流配送等多个领域。
在航拍摄影中,穿越机F4飞控F405可以实现飞行器的稳定悬停、跟随拍摄、航线规划等功能,为摄影师提供高质量的航拍作品。在植保喷洒中,穿越机F4飞控F405可以实现精确的飞行路径规划和药剂喷洒控制,提高农业生产效率。在物流配送中,穿越机F4飞控F405可以实现点对点的自动飞行和货物运输,提供快速、高效的物流服务。
总结:
穿越机F4飞控F405的代码、PCB文件和原理图是无人机领域的重要组成部分。通过编写代码,实现飞行器的各种功能和控制;通过设计PCB文件和原理图,实现硬件系统的配置和连接。穿越机F4飞控F405在无人机应用中具有广泛的应用前景,可以为航拍摄影、植保喷洒、物流配送等领域提供高性能的飞行控制系统。
以上相关代码,程序地址:http://coupd.cn/719166930350.html















 2769
2769











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









