






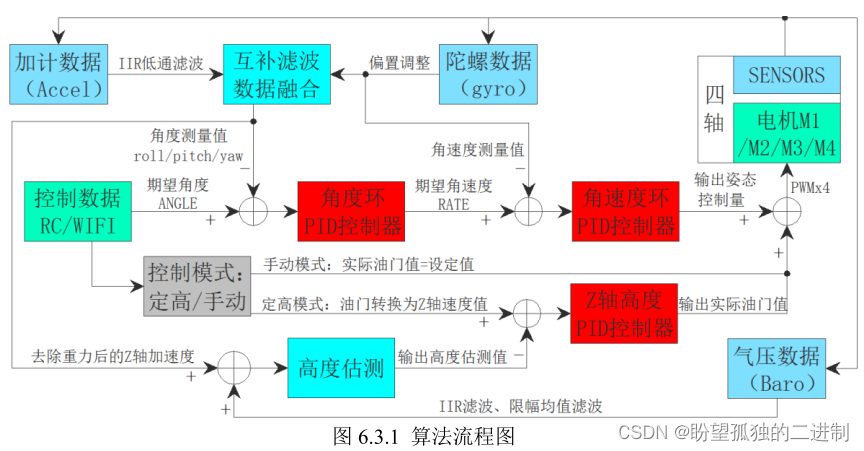
6.3 姿态解算和 PID 算法流程图
MiniFly 四轴的姿态解算和 PID 算法流程图如图 6.3.1 所示:
//姿态稳定任务,以每秒500次的速度采集传感器姿态信息,然后通过滤波和PID算法得到电机控制量。
void stabilizerTask(void* param)
{
u32 tick = 0;
u32 lastWakeTime = getSysTickCnt();
ledseqRun(SYS_LED, seq_alive);
while(!sensorsAreCalibrated())
{
vTaskDelayUntil(&lastWakeTime, MAIN_LOOP_DT);
}
while(1)
{
vTaskDelayUntil(&lastWakeTime, MAIN_LOOP_DT); /*1ms周期延时*/
//获取6轴和气压数据(500Hz)
if (RATE_DO_EXECUTE(RATE_500_HZ, tick))
{
sensorsAcquire(&sensorData, tick); /*获取6轴和气压数据*/
}
//四元数和欧拉角计算(250Hz)
if (RATE_DO_EXECUTE(ATTITUDE_ESTIMAT_RATE, tick))
{
imuUpdate(sensorData.acc, sensorData.gyro, &state, ATTITUDE_ESTIMAT_DT);
}
//位置预估计算(250Hz)
if (RATE_DO_EXECUTE(POSITION_ESTIMAT_RATE, tick))
{
positionEstimate(&sensorData, &state, POSITION_ESTIMAT_DT);
}
//目标姿态和飞行模式设定(100Hz)
if (RATE_DO_EXECUTE(RATE_100_HZ, tick) && getIsCalibrated()==true)
{
commanderGetSetpoint(&setpoint, &state); /*目标数据和飞行模式设定*/
}
if (RATE_DO_EXECUTE(RATE_250_HZ, tick))
{
fastAdjustPosZ(); /*快速调整高度*/
}
/*读取光流数据(100Hz)*/
if (RATE_DO_EXECUTE(RATE_100_HZ, tick))
{
getOpFlowData(&state, 0.01f);
}
/*翻滚检测(500Hz) 非定点模式*/
if (RATE_DO_EXECUTE(RATE_500_HZ, tick) && (getCommanderCtrlMode() != 0x03))
{
flyerFlipCheck(&setpoint, &control, &state);
}
/*异常检测*/
anomalDetec(&sensorData, &state, &control);
/*PID控制*/
stateControl(&control, &sensorData, &state, &setpoint, tick);
//控制电机输出(500Hz)
if (RATE_DO_EXECUTE(RATE_500_HZ, tick))
{
powerControl(&control);
}
tick++;
}
}
下面是该任务串行执行的函数,其中最核心的是串级 PID 控制函数stateControl()
/*获取传感器数据*/
void sensorsAcquire(sensorData_t *sensors, const u32 tick)
{
sensorsReadGyro(&sensors->gyro);
sensorsReadAcc(&sensors->acc);
sensorsReadMag(&sensors->mag);
sensorsReadBaro(&sensors->baro);
}
void imuUpdate(Axis3f acc, Axis3f gyro, state_t *state , float dt) /*数据融合 互补滤波*/
{
float normalise;
float ex, ey, ez;
float halfT = 0.5f * dt;
float accBuf[3] = {0.f};
Axis3f tempacc = acc;
gyro.x = gyro.x * DEG2RAD; /* 度转弧度 */
gyro.y = gyro.y * DEG2RAD;
gyro.z = gyro.z * DEG2RAD;
/* 加速度计输出有效时,利用加速度计补偿陀螺仪*/
if((acc.x != 0.0f) || (acc.y != 0.0f) || (acc.z != 0.0f))
{
/*单位化加速计测量值*/
normalise = invSqrt(acc.x * acc.x + acc.y * acc.y + acc.z * acc.z);
acc.x *= normalise;
acc.y *= normalise;
acc.z *= normalise;
/*加速计读取的方向与重力加速计方向的差值,用向量叉乘计算*/
ex = (acc.y * rMat[2][2] - acc.z * rMat[2][1]);
ey = (acc.z * rMat[2][0] - acc.x * rMat[2][2]);
ez = (acc.x * rMat[2][1] - acc.y * rMat[2][0]);
/*误差累计,与积分常数相乘*/
exInt += Ki * ex * dt ;
eyInt += Ki * ey * dt ;
ezInt += Ki * ez * dt ;
/*用叉积误差来做PI修正陀螺零偏,即抵消陀螺读数中的偏移量*/
gyro.x += Kp * ex + exInt;
gyro.y += Kp * ey + eyInt;
gyro.z += Kp * ez + ezInt;
}
/* 一阶近似算法,四元数运动学方程的离散化形式和积分 */
float q0Last = q0;
float q1Last = q1;
float q2Last = q2;
float q3Last = q3;
q0 += (-q1Last * gyro.x - q2Last * gyro.y - q3Last * gyro.z) * halfT;
q1 += ( q0Last * gyro.x + q2Last * gyro.z - q3Last * gyro.y) * halfT;
q2 += ( q0Last * gyro.y - q1Last * gyro.z + q3Last * gyro.x) * halfT;
q3 += ( q0Last * gyro.z + q1Last * gyro.y - q2Last * gyro.x) * halfT;
/*单位化四元数*/
normalise = invSqrt(q0 * q0 + q1 * q1 + q2 * q2 + q3 * q3);
q0 *= normalise;
q1 *= normalise;
q2 *= normalise;
q3 *= normalise;
imuComputeRotationMatrix(); /*计算旋转矩阵*/
/*计算roll pitch yaw 欧拉角*/
state->attitude.pitch = -asinf(rMat[2][0]) * RAD2DEG;
state->attitude.roll = atan2f(rMat[2][1], rMat[2][2]) * RAD2DEG;
state->attitude.yaw = atan2f(rMat[1][0], rMat[0][0]) * RAD2DEG;
if (!isGravityCalibrated) /*未校准*/
{
// accBuf[0] = tempacc.x* rMat[0][0] + tempacc.y * rMat[0][1] + tempacc.z * rMat[0][2]; /*accx*/
// accBuf[1] = tempacc.x* rMat[1][0] + tempacc.y * rMat[1][1] + tempacc.z * rMat[1][2]; /*accy*/
accBuf[2] = tempacc.x* rMat[2][0] + tempacc.y * rMat[2][1] + tempacc.z * rMat[2][2]; /*accz*/
calBaseAcc(accBuf); /*计算静态加速度*/
}
}
void positionEstimate(sensorData_t* sensorData, state_t* state, float dt)
{
static float rangeLpf = 0.f;
static float accLpf[3] = {0.f}; /*加速度低通*/
float weight = wBaro;
float relateHight = sensorData->baro.asl - startBaroAsl; /*气压相对高度*/
if(getModuleID()==OPTICAL_FLOW && isEnableVl53lxx==true) /*光流模块可用,且使用激光*/
{
vl53lxxReadRange(&sensorData->zrange); /*读取激光数据*/
// rangeLpf = sensorData->zrange.distance;
rangeLpf += (sensorData->zrange.distance - rangeLpf) * 0.1f; /*低通 单位cm*/
float quality = sensorData->zrange.quality;
if(quality < 0.3f) /*低于这个可行度,激光数据不可用*/
{
quality = 0.f;
}else
{
weight = quality;
startBaroAsl = sensorData->baro.asl - rangeLpf;
}
fusedHeight = rangeLpf * quality + (1.0f - quality) * relateHight;/*融合高度*/
}
else /*无光流模块*/
{
fusedHeight = relateHight; /*融合高度*/
}
fusedHeightLpf += (fusedHeight - fusedHeightLpf) * 0.1f; /*融合高度 低通*/
if(isRstHeight)
{
isRstHeight = false;
weight = 0.95f; /*增加权重,快速调整*/
startBaroAsl = sensorData->baro.asl;
if(getModuleID() == OPTICAL_FLOW)
{
if(sensorData->zrange.distance < VL53L0X_MAX_RANGE)
{
startBaroAsl -= sensorData->zrange.distance;
fusedHeight = sensorData->zrange.distance;
}
}
estimator.pos[Z] = fusedHeight;
}
else if(isRstAll)
{
isRstAll = false;
accLpf[Z] = 0.f;
fusedHeight = 0.f;
fusedHeightLpf = 0.f;
startBaroAsl = sensorData->baro.asl;
if(getModuleID() == OPTICAL_FLOW)
{
if(sensorData->zrange.distance < VL53L0X_MAX_RANGE)
{
startBaroAsl -= sensorData->zrange.distance;
fusedHeight = sensorData->zrange.distance;
}
}
estimator.vel[Z] = 0.f;
estimator.pos[Z] = fusedHeight;
}
Axis3f accelBF;
accelBF.x = sensorData->acc.x * GRAVITY_CMSS - estimator.accBias[X];
accelBF.y = sensorData->acc.y * GRAVITY_CMSS - estimator.accBias[Y];
accelBF.z = sensorData->acc.z * GRAVITY_CMSS - estimator.accBias[Z];
/* Rotate vector to Earth frame - from Forward-Right-Down to North-East-Up*/
imuTransformVectorBodyToEarth(&accelBF);
estimator.acc[X] = applyDeadbandf(accelBF.x, estimator.vAccDeadband);/*去除死区的加速度*/
estimator.acc[Y] = applyDeadbandf(accelBF.y, estimator.vAccDeadband);/*去除死区的加速度*/
estimator.acc[Z] = applyDeadbandf(accelBF.z, estimator.vAccDeadband);/*去除死区的加速度*/
for(u8 i=0; i<3; i++)
accLpf[i] += (estimator.acc[i] - accLpf[i]) * 0.1f; /*加速度低通*/
bool isKeyFlightLand = ((getCommanderKeyFlight()==true)||(getCommanderKeyland()==true)); /*定高飞或者降落状态*/
if(isKeyFlightLand == true) /*定高飞或者降落状态*/
{
state->acc.x = constrainf(accLpf[X], -ACC_LIMIT, ACC_LIMIT); /*加速度限幅*/
state->acc.y = constrainf(accLpf[Y], -ACC_LIMIT, ACC_LIMIT); /*加速度限幅*/
state->acc.z = constrainf(accLpf[Z], -ACC_LIMIT, ACC_LIMIT); /*加速度限幅*/
}else
{
state->acc.x = constrainf(estimator.acc[X], -ACC_LIMIT_MAX, ACC_LIMIT_MAX); /*最大加速度限幅*/
state->acc.y = constrainf(estimator.acc[Y], -ACC_LIMIT_MAX, ACC_LIMIT_MAX); /*最大加速度限幅*/
state->acc.z = constrainf(estimator.acc[Z], -ACC_LIMIT_MAX, ACC_LIMIT_MAX); /*最大加速度限幅*/
}
float errPosZ = fusedHeight - estimator.pos[Z];
/* 位置预估: Z-axis */
inavFilterPredict(Z, dt, estimator.acc[Z]);
/* 位置校正: Z-axis */
inavFilterCorrectPos(Z, dt, errPosZ, weight);
if(getModuleID() == OPTICAL_FLOW) /*光流模块可用*/
{
float opflowDt = dt;
float opResidualX = opFlow.posSum[X] - estimator.pos[X];
float opResidualY = opFlow.posSum[Y] - estimator.pos[Y];
float opResidualXVel = opFlow.velLpf[X] - estimator.vel[X];
float opResidualYVel = opFlow.velLpf[Y] - estimator.vel[Y];
float opWeightScaler = 1.0f;
float wXYPos = wOpflowP * opWeightScaler;
float wXYVel = wOpflowV * sq(opWeightScaler);
/* 位置预估: XY-axis */
inavFilterPredict(X, opflowDt, estimator.acc[X]);
inavFilterPredict(Y, opflowDt, estimator.acc[Y]);
/* 位置校正: XY-axis */
inavFilterCorrectPos(X, opflowDt, opResidualX, wXYPos);
inavFilterCorrectPos(Y, opflowDt, opResidualY, wXYPos);
/* 速度校正: XY-axis */
inavFilterCorrectVel(X, opflowDt, opResidualXVel, wXYVel);
inavFilterCorrectVel(Y, opflowDt, opResidualYVel, wXYVel);
}
/*加速度偏置校正*/
Axis3f accelBiasCorr = {{ 0, 0, 0}};
accelBiasCorr.z -= errPosZ * sq(wBaro);
float accelBiasCorrMagnitudeSq = sq(accelBiasCorr.x) + sq(accelBiasCorr.y) + sq(accelBiasCorr.z);
if (accelBiasCorrMagnitudeSq < sq(INAV_ACC_BIAS_ACCEPTANCE_VALUE))
{
/* transform error vector from NEU frame to body frame */
imuTransformVectorEarthToBody(&accelBiasCorr);
/* Correct accel bias */
estimator.accBias[X] += accelBiasCorr.x * wAccBias * dt;
estimator.accBias[Y] += accelBiasCorr.y * wAccBias * dt;
estimator.accBias[Z] += accelBiasCorr.z * wAccBias * dt;
}
if(isKeyFlightLand == true) /*定高飞或者降落状态*/
{
state->velocity.x = constrainf(estimator.vel[X], -VELOCITY_LIMIT, VELOCITY_LIMIT); /*速度限幅 VELOCITY_LIMIT*/
state->velocity.y = constrainf(estimator.vel[Y], -VELOCITY_LIMIT, VELOCITY_LIMIT); /*速度限幅 VELOCITY_LIMIT*/
state->velocity.z = constrainf(estimator.vel[Z], -VELOCITY_LIMIT, VELOCITY_LIMIT); /*速度限幅 VELOCITY_LIMIT*/
}else
{
state->velocity.x = constrainf(estimator.vel[X], -VELOCITY_LIMIT_MAX, VELOCITY_LIMIT_MAX); /*最大速度限幅 VELOCITY_LIMIT_MAX*/
state->velocity.y = constrainf(estimator.vel[Y], -VELOCITY_LIMIT_MAX, VELOCITY_LIMIT_MAX); /*最大速度限幅 VELOCITY_LIMIT_MAX*/
state->velocity.z = constrainf(estimator.vel[Z], -VELOCITY_LIMIT_MAX, VELOCITY_LIMIT_MAX); /*最大速度限幅 VELOCITY_LIMIT_MAX*/
}
state->position.x = estimator.pos[X];
state->position.y = estimator.pos[Y];
state->position.z = estimator.pos[Z];
}
void commanderGetSetpoint(setpoint_t *setpoint, state_t *state)
{
static float maxAccZ = 0.f;
ctrlDataUpdate(); /*更新控制数据*/
state->isRCLocked = isRCLocked; /*更新遥控器锁定状态*/
if(commander.ctrlMode & 0x01)/*定高模式*/
{
if(commander.keyLand)/*一键降落*/
{
flyerAutoLand(setpoint, state);
}
else if(commander.keyFlight)/*一键起飞*/
{
setpoint->thrust = 0;
setpoint->mode.z = modeAbs;
if (initHigh == false)
{
initHigh = true;
isAdjustingPosXY = true;
errorPosX = 0.f;
errorPosY = 0.f;
errorPosZ = 0.f;
setFastAdjustPosParam(0, 1, 80.f); /*一键起飞高度80cm*/
}
float climb = ((ctrlValLpf.thrust - 32767.f) / 32767.f);
if(climb > 0.f)
climb *= MAX_CLIMB_UP;
else
climb *= MAX_CLIMB_DOWN;
if (fabsf(climb) > 5.f)
{
isAdjustingPosZ = true;
setpoint->mode.z = modeVelocity;
setpoint->velocity.z = climb;
if(climb < -(CLIMB_RATE/5.f)) /*油门下拉过大*/
{
if(isExitFlip == true) /*退出空翻,再检测加速度*/
{
if(maxAccZ < state->acc.z)
maxAccZ = state->acc.z;
if(maxAccZ > 250.f) /*油门下拉过大,飞机触地停机*/
{
commander.keyFlight = false;
estRstAll(); /*复位估测*/
}
}
}else
{
maxAccZ = 0.f;
}
}
else if (isAdjustingPosZ == true)
{
isAdjustingPosZ = false;
setpoint->mode.z = modeAbs;
setpoint->position.z = state->position.z + errorPosZ; /*调整新位置*/
}
else if(isAdjustingPosZ == false) /*Z位移误差*/
{
errorPosZ = setpoint->position.z - state->position.z;
errorPosZ = constrainf(errorPosZ, -10.f, 10.f); /*误差限幅 单位cm*/
}
}
else/*着陆状态*/
{
setpoint->mode.z = modeDisable;
setpoint->thrust = 0;
setpoint->velocity.z = 0;
setpoint->position.z = 0;
initHigh = false;
isAdjustingPosZ = false;
}
}
else /*手动飞模式*/
{
setpoint->mode.z = modeDisable;
setpoint->thrust = ctrlValLpf.thrust;
}
setpoint->attitude.roll = ctrlValLpf.roll;
setpoint->attitude.pitch = ctrlValLpf.pitch;
setpoint->attitude.yaw = -ctrlValLpf.yaw; /*摇杆方向和yaw方向相反*/
if(getOpDataState() && commander.ctrlMode == 0x03) /*光流数据可用,定点模式*/
{
setpoint->attitude.yaw *= 0.5f; /*定点模式减慢yaw调节*/
/*调整位置 速度模式*/
if(fabsf(setpoint->attitude.roll) > 1.5f || fabsf(setpoint->attitude.pitch) > 1.5f)
{
adjustPosXYTime = 0;
isAdjustingPosXY = true;
setpoint->mode.x = modeVelocity;
setpoint->mode.y = modeVelocity;
setpoint->velocity.x = setpoint->attitude.pitch * 4.0f;
setpoint->velocity.y = setpoint->attitude.roll * 4.0f;
}
else if(isAdjustingPosXY == true)
{
if(adjustPosXYTime++ > 100)
{
adjustPosXYTime = 0;
isAdjustingPosXY = false;
}
setpoint->mode.x = modeAbs;
setpoint->mode.y = modeAbs;
setpoint->position.x = state->position.x + errorPosX; //调整新位置
setpoint->position.y = state->position.y + errorPosY; //调整新位置
}
else if(isAdjustingPosXY == false) /*位移误差*/
{
errorPosX = setpoint->position.x - state->position.x;
errorPosY = setpoint->position.y - state->position.y;
errorPosX = constrainf(errorPosX, -30.0f, 30.0f); /*误差限幅 单位cm*/
errorPosY = constrainf(errorPosY, -30.0f, 30.0f); /*误差限幅 单位cm*/
}
}
else /*手动模式*/
{
setpoint->mode.x = modeDisable;
setpoint->mode.y = modeDisable;
}
setpoint->mode.roll = modeDisable;
setpoint->mode.pitch = modeDisable;
if(commander.flightMode)/*无头模式*/
{
yawMode = CAREFREE;
rotateYawCarefree(setpoint, state);
}
else /*X飞行模式*/
{
yawMode = XMODE;
}
}
/*快速调整高度*/
static void fastAdjustPosZ(void)
{
if(velModeTimes > 0)
{
velModeTimes--;
estRstHeight(); /*复位估测高度*/
float baroVel = (sensorData.baro.asl - baroLast) / 0.004f; /*250Hz*/
baroLast = sensorData.baro.asl;
baroVelLpf += (baroVel - baroVelLpf) * 0.35f;
setpoint.mode.z = modeVelocity;
state.velocity.z = baroVelLpf; /*气压计融合*/
setpoint.velocity.z = -1.0f * baroVelLpf;
if(velModeTimes == 0)
{
if(getModuleID() == OPTICAL_FLOW)
setHeight = getFusedHeight();
else
setHeight = state.position.z;
}
}
else if(absModeTimes > 0)
{
absModeTimes--;
estRstAll(); /*复位估测*/
setpoint.mode.z = modeAbs;
setpoint.position.z = setHeight;
}
}
bool getOpFlowData(state_t *state, float dt)
{
static u8 cnt = 0;
float height = 0.01f * getFusedHeight();/*读取高度信息 单位m*/
if(opFlow.isOpFlowOk && height<4.0f) /*4m范围内,光流可用*/
{
cnt= 0;
opFlow.isDataValid = true;
float coeff = RESOLUTION * height;
float tanRoll = tanf(state->attitude.roll * DEG2RAD);
float tanPitch = tanf(state->attitude.pitch * DEG2RAD);
opFlow.pixComp[X] = 480.f * tanPitch; /*像素补偿,负方向*/
opFlow.pixComp[Y] = 480.f * tanRoll;
opFlow.pixValid[X] = (opFlow.pixSum[X] + opFlow.pixComp[X]); /*实际输出像素*/
opFlow.pixValid[Y] = (opFlow.pixSum[Y] + opFlow.pixComp[Y]);
if(height < 0.05f) /*光流测量范围大于5cm*/
{
coeff = 0.0f;
}
opFlow.deltaPos[X] = coeff * (opFlow.pixValid[X] - opFlow.pixValidLast[X]); /*2帧之间位移变化量,单位cm*/
opFlow.deltaPos[Y] = coeff * (opFlow.pixValid[Y] - opFlow.pixValidLast[Y]);
opFlow.pixValidLast[X] = opFlow.pixValid[X]; /*上一次实际输出像素*/
opFlow.pixValidLast[Y] = opFlow.pixValid[Y];
opFlow.deltaVel[X] = opFlow.deltaPos[X] / dt; /*速度 cm/s*/
opFlow.deltaVel[Y] = opFlow.deltaPos[Y] / dt;
#ifdef AVERAGE_FILTER
velFilter(opFlow.deltaVel, opFlow.velLpf); /*限幅均值滤波法*/
#else
opFlow.velLpf[X] += (opFlow.deltaVel[X] - opFlow.velLpf[X]) * 0.15f; /*速度低通 cm/s*/
opFlow.velLpf[Y] += (opFlow.deltaVel[Y] - opFlow.velLpf[Y]) * 0.15f; /*速度低通 cm/s*/
#endif
opFlow.velLpf[X] = constrainf(opFlow.velLpf[X], -VEL_LIMIT, VEL_LIMIT); /*速度限幅 cm/s*/
opFlow.velLpf[Y] = constrainf(opFlow.velLpf[Y], -VEL_LIMIT, VEL_LIMIT); /*速度限幅 cm/s*/
opFlow.posSum[X] += opFlow.deltaPos[X]; /*累积位移 cm*/
opFlow.posSum[Y] += opFlow.deltaPos[Y]; /*累积位移 cm*/
}
else if(opFlow.isDataValid == true)
{
if(cnt++ > 100) /*超过定点高度,切换为定高模式*/
{
cnt = 0;
opFlow.isDataValid = false;
}
resetOpFlowData();
}
return opFlow.isOpFlowOk; /*返回光流状态*/
}
/********************************************************
* Flyer 翻滚检测
*********************************************************/
void flyerFlipCheck(setpoint_t* setpoint, control_t* control, state_t* state)
{
static u16 flipThrust = 0;
static u16 tempThrust = 0;
static u16 reverTime = 0;
static u16 flipTimeout = 0;
static float pitchTemp = 0.0;
static float rollTemp = 0.0;
static float yawTemp = 0.0;
static float deltaThrust = 0.0;
static u16 exitFlipCnt = 0;
static u16 flipThrustMax = 0;
fstate = (u8)flipState;
switch(flipState)
{
case FLIP_IDLE: /*翻滚空闲状态*/
{
if(flipDir!=CENTER)
{
if(control->thrust > 28000 && state->velocity.z > -20.f)
{
flipState = FLIP_SET;
exitFlipCnt = 500; /*空翻完成,延时1S(500Hz)退出空翻 */
isExitFlip = false;
}
else
{
flipDir = CENTER;
}
}else if(isExitFlip == false)
{
if(exitFlipCnt > 0)
exitFlipCnt--;
else
isExitFlip = true;
}
break;
}
case FLIP_SET: /*翻滚设置*/
{
currentRate = 0.f;
maxRateCnt = 0;
currentAngle = 0.f;
flipTimeout = 0;
control->flipDir = flipDir;
flipThrust = -9000.0f + 1.2f * configParam.thrustBase;
deltaThrust = configParam.thrustBase / 90.0f;
flipThrustMax = configParam.thrustBase + 20000;
if(flipThrustMax > 62000) flipThrustMax = 62000;
tempThrust = flipThrust;
rollTemp = state->attitude.roll;
pitchTemp = state->attitude.pitch;
yawTemp = state->attitude.yaw;
flipState = FLIP_SPEED_UP;
break;
}
case FLIP_SPEED_UP: /*加速上升过程*/
{
if(state->velocity.z < desiredVelZ)
{
setpoint->mode.z = modeDisable;
if(tempThrust < flipThrustMax)
tempThrust += deltaThrust;
setpoint->thrust = tempThrust;
if(flipTimeout++ > SPEED_UP_TIMEOUT) /*超时处理*/
{
flipTimeout = 0;
flipState = FLIP_SLOW_DOWN; /*直接进入下一个状态*/
}
}else
{
flipTimeout = 0;
flipState = FLIP_SLOW_DOWN;
}
break;
}
case FLIP_SLOW_DOWN: /*减速过程*/
{
if(tempThrust > flipThrust)
{
tempThrust -= (6500.f - flipThrust / 10.0f);
setpoint->mode.z = modeDisable;
setpoint->thrust = tempThrust;
}else
{
flipState = FLIP_PERIOD;
}
}
case FLIP_PERIOD: /*翻滚过程*/
{
if(flipTimeout++ > FLIP_TIMEOUT) /*超时处理*/
{
flipTimeout = 0;
flipState = FLIP_ERROR;
}
setpoint->mode.z = modeDisable;
setpoint->thrust = flipThrust - 3*currentRate;
currentAngle += currentRate; /*当前角度 放大500倍*/
if(currentAngle < MID_ANGLE) /*上半圈*/
{
if(currentRate < MAX_FLIP_RATE)/*小于最大速率,速率继续增大*/
currentRate += DELTA_RATE;
else /*大于最大速率,速率保持*/
maxRateCnt++;
}else /*下半圈*/
{
if(maxRateCnt > 0)
{
maxRateCnt--;
}else
{
if(currentRate >= DELTA_RATE && currentAngle < 2*MID_ANGLE)
{
currentRate -= DELTA_RATE;
}
else
flipState = FLIP_FINISHED;
}
}
switch(control->flipDir)
{
case FORWARD: /* pitch+ */
setpoint->attitude.pitch = currentRate;
setpoint->attitude.roll = state->attitude.roll = rollTemp;
setpoint->attitude.yaw = state->attitude.yaw = yawTemp;
break;
case BACK: /* pitch- */
setpoint->attitude.pitch = -currentRate;
setpoint->attitude.roll = state->attitude.roll = rollTemp;
setpoint->attitude.yaw = state->attitude.yaw = yawTemp;
break;
case LEFT: /* roll- */
setpoint->attitude.roll = -currentRate;
setpoint->attitude.pitch = state->attitude.pitch = pitchTemp;
setpoint->attitude.yaw = state->attitude.yaw = yawTemp;
break;
case RIGHT: /* roll+ */
setpoint->attitude.roll = currentRate;
setpoint->attitude.pitch = state->attitude.pitch = pitchTemp;
setpoint->attitude.yaw = state->attitude.yaw = yawTemp;
break;
default :break;
}
break;
}
case FLIP_FINISHED: /*翻滚完成*/
{
setpoint->mode.z = modeDisable;
setpoint->thrust = tempThrust;
tempThrust = flipThrust;
reverTime = 0;
flipTimeout = 0;
flipDir = CENTER;
control->flipDir = flipDir;
flipState = REVER_SPEED_UP;
break;
}
case REVER_SPEED_UP: /*翻滚完成后 反向加速*/
{
if(reverTime++<REVER_SPEEDUP_TIME)
{
if(tempThrust < flipThrustMax)
tempThrust += 2.0f * deltaThrust;
setpoint->mode.z = modeDisable;
setpoint->thrust = tempThrust;
}else
{
flipTimeout = 0;
flipState = FLIP_IDLE;
// if(getCommanderKeyFlight()) /*定高模式*/
// {
// setpoint->thrust = 0;
// setpoint->mode.z = modeAbs;
// }
}
break;
}
case FLIP_ERROR:
{
reverTime = 0;
flipDir = CENTER;
control->flipDir = CENTER;
setpoint->mode.z = modeDisable;
setpoint->thrust = 0;
if(flipTimeout++ > 1)
{
flipTimeout = 0;
if(getCommanderKeyFlight()) /*定高模式*/
{
setpoint->thrust = 0;
setpoint->mode.z = modeAbs;
}
flipState = FLIP_IDLE;
}
break;
}
default : break;
}
}
/*异常检测*/
void anomalDetec(const sensorData_t *sensorData, const state_t *state, const control_t *control)
{
#if defined(DETEC_ENABLED)
if(control->flipDir != CENTER)
{
outFlipCnt = 1000;
return;
}
if(state->isRCLocked == false && //遥控器解锁状态
getCommanderKeyFlight() == false && //未飞行状态
(getCommanderCtrlMode() & 0x01) == 0x01)//定高模式
{
float accMAG = (sensorData->acc.x*sensorData->acc.x) +
(sensorData->acc.y*sensorData->acc.y) +
(sensorData->acc.z*sensorData->acc.z);
if(detecFreeFall(state->acc.z/980.f, accMAG) == true)/*自由落体检测*/
{
setCommanderKeyFlight(true);
setFastAdjustPosParam(35, 10, 0.f); /*设置快速调整位置参数*/
}
}
if(outFlipCnt > 0)
{
outFlipCnt--;
}
if(outFlipCnt == 0 && detecTumbled(state)==true)/*碰撞检测*/
{
setCommanderKeyFlight(false);
setCommanderKeyland(false);
}
#endif
}
void stateControl(control_t *control, sensorData_t *sensors, state_t *state, setpoint_t *setpoint, const u32 tick)
{
static u16 cnt = 0;
if (RATE_DO_EXECUTE(POSITION_PID_RATE, tick))
{
if (setpoint->mode.x != modeDisable || setpoint->mode.y != modeDisable || setpoint->mode.z != modeDisable)
{
positionController(&actualThrust, &attitudeDesired, setpoint, state, POSITION_PID_DT);
}
}
//角度环(外环)
if (RATE_DO_EXECUTE(ANGEL_PID_RATE, tick))
{
if (setpoint->mode.z == modeDisable)
{
actualThrust = setpoint->thrust;
}
if (setpoint->mode.x == modeDisable || setpoint->mode.y == modeDisable)
{
attitudeDesired.roll = setpoint->attitude.roll;
attitudeDesired.pitch = setpoint->attitude.pitch;
}
if(control->flipDir == CENTER)
{
attitudeDesired.yaw += setpoint->attitude.yaw/ANGEL_PID_RATE; /*期望YAW 速率模式*/
if(attitudeDesired.yaw > 180.0f)
attitudeDesired.yaw -= 360.0f;
if(attitudeDesired.yaw < -180.0f)
attitudeDesired.yaw += 360.0f;
}
attitudeDesired.roll += configParam.trimR; //叠加微调值
attitudeDesired.pitch += configParam.trimP;
attitudeAnglePID(&state->attitude, &attitudeDesired, &rateDesired);
}
//角速度环(内环)
if (RATE_DO_EXECUTE(RATE_PID_RATE, tick))
{
if (setpoint->mode.roll == modeVelocity)
{
rateDesired.roll = setpoint->attitudeRate.roll;
attitudeControllerResetRollAttitudePID();
}
if (setpoint->mode.pitch == modeVelocity)
{
rateDesired.pitch = setpoint->attitudeRate.pitch;
attitudeControllerResetPitchAttitudePID();
}
extern u8 fstate;
if (control->flipDir != CENTER && fstate == 4) /*空翻过程只使用内环PID*/
{
rateDesired.pitch = setpoint->attitude.pitch;
rateDesired.roll = setpoint->attitude.roll;
}
attitudeRatePID(&sensors->gyro, &rateDesired, control);
}
control->thrust = actualThrust;
if (control->thrust < 5.f)
{
control->roll = 0;
control->pitch = 0;
control->yaw = 0;
attitudeResetAllPID(); /*复位姿态PID*/
positionResetAllPID(); /*复位位置PID*/
attitudeDesired.yaw = state->attitude.yaw; /*复位计算的期望yaw值*/
if(cnt++ > 1500)
{
cnt = 0;
configParamGiveSemaphore();
}
}else
{
cnt = 0;
}
}
9.控制马达输出
void powerControl(control_t *control) /*功率输出控制*/
{
s16 r = control->roll / 2.0f;
s16 p = control->pitch / 2.0f;
motorPWM.m1 = limitThrust(control->thrust - r - p + control->yaw);
motorPWM.m2 = limitThrust(control->thrust - r + p - control->yaw);
motorPWM.m3 = limitThrust(control->thrust + r + p + control->yaw);
motorPWM.m4 = limitThrust(control->thrust + r - p - control->yaw);
if (motorSetEnable)
{
motorPWM = motorPWMSet;
}
motorsSetRatio(MOTOR_M1, motorPWM.m1); /*控制电机输出百分比*/
motorsSetRatio(MOTOR_M2, motorPWM.m2);
motorsSetRatio(MOTOR_M3, motorPWM.m3);
motorsSetRatio(MOTOR_M4, motorPWM.m4);
}
void getMotorPWM(motorPWM_t* get)
{
*get = motorPWM;
}
void setMotorPWM(bool enable, u32 m1_set, u32 m2_set, u32 m3_set, u32 m4_set)
{
motorSetEnable = enable;
motorPWMSet.m1 = m1_set;
motorPWMSet.m2 = m2_set;
motorPWMSet.m3 = m3_set;
motorPWMSet.m4 = m4_set;
}















 5426
5426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









