






23年还剩不到20天,复盘下发现很多事情还没做完,生产力跟不上计划啊。。。如果要说对2023年行业的最深印象,我觉得可以用两个词形容“巨卷”和动荡。
今年BEV和NOA量产方案各家都在抢滩登陆,拼尽了算力、数据和码农们的人力(再次想到某xx公司封闭开发的状态),谁能率先抢占市场,就会有大量的客户和资源进来。30w的车型拼的是炮火连天,20w的车型更是一片哀嚎,拼不过就降价。蔚来、理想、华为、智己、极氪,还有比亚迪!谁将继续保持领先,24年我们且看吧~
说到动荡,其实本质就是存活与灭亡的问题,威马、爱驰都相继倒闭,行业内还有很多自动驾驶公司没实现盈利,是并购还是直接砍掉业务甚至公司,都是个未知数,也随时有可能发生。听说今年的年终奖,有几家公司已经没了。
可能是因为前期烧钱太多了,现在说话不离量产二字,公司想要的是能够直接带来利润、开发项目的干才,Demo时代已经彻底过去了。但是,我们比谁都明白,完整的量产经验太奢侈了,未毕业的同学几乎接触不到,很多已经工作的同学,也仅仅负责小的子模块,管中窥豹,可见一斑。这也是我们今年一直在大力自研课程的原因,自动驾驶之心想要做这样一个桥梁,对接工业界和学术界,让大家清楚知道每个模块的功能以及作用,上下游是如何配合的?这也是我们为什么要坚持开发了近20门课程。
今年是自动驾驶之心平台非常忙碌的一年,顺应这波浪潮,平台自研了一系列的学习课程,也为大家创build了一个官网(www.zdjszx.com),随时供大家学习。这里有各类公开课、学习综述文档、招聘等干货,网页端和手机端都可以方便使用。欢迎大家来逛,相信一定收获满满。
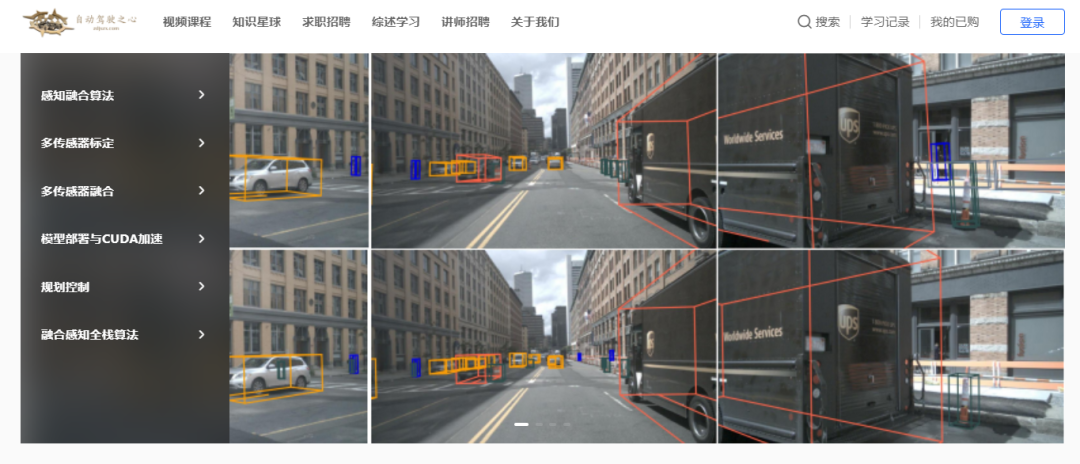
截止到目前,自动驾驶之心共上线了近20门课程,方向涉及BEV感知、多模态融合、多传感器融合、3D&4D毫米波雷达、目标跟踪、多传感器标定、规划控制、Occupancy、车道线检测、模型部署、轨迹预测等多个方向,基本形成了技术闭环,为行业培养了近2500名各类算法工程人员。其中BEV感知的同学人数最多,已经近600人,面向动态静态障碍物检测;其次是目前非常紧缺的cuda与模型部署类方向,接近了400人,课程准备的很充分,也比较深入,学习讨论环境特别好;多传感器标定的同学也非常多,近240人,面向目前量产常见的Camera/Lidar/IMU/Radar/环视相机等传感器的在线离线标定,还有其它多模态感知、多传感器融合方向的同学近700多名。
很开心看到小伙伴们能够通过自动驾驶之心平台的课程实现自己认知的突破,进而斩获各大厂的offer。目前已经确定了多名在校同学和已经工作的小伙伴拿到了包括蔚来、理想、百度、小鹏、滴滴、旷视、商汤、上海AI Lab、文远知行、比亚迪、极氪等多家自动驾驶公司offer,收获颇丰。所谓师傅领进门,修行看个人。我们也衷心的希望大家能够建立起终身学习的理念。不积跬步无以至千里,自动驾驶之路道阻且长。有了这么多人的支持,也让我们看到了自动驾驶之心的责任和价值,身上的担子更重了,但脚步也更稳了。
如果你还在苦于不知道怎么入门自动驾驶,还未掌握有效的学习方法,无人带路独自摸索,真心建议学习自动驾驶之心的课程(最前沿的内容和最清晰的讲解,还有氛围很好的讨论群),这次双十二给大家准备了8折优惠券(近一年力度最大的优惠),大小课程涉及了近20种,非常系统和全面。
双十二钜惠全场八折!
扫码学习全部课程!
自动驾驶感知系列
国内首个单目3D感知全栈教程(3D检测+BEV+Occupancy)
多模态融合感知
国内首个多模态3D目标检测全栈教程(前融合/特征级融合/后融合)
多传感器融合与多目标跟踪全栈教程(Camera/Lidar/Radar)
多传感器融合中的毫米波雷达-视觉融合感知全栈教程(深度学习+传统方式)
车道线检测
国内首个面向量产级的车道线感知全栈教程(单目/BEV/局部高精地图)
模型部署
自动驾驶模型部署:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码
Transformer与大模型
彻底搞懂Transformer在检测/分割/3D视觉/自动驾驶/视觉大模型上的应用
多传感器标定
Lidar+Radar+Camera+IMU离线/在线近20+标定方案
规划控制
论文带读
其他
YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程
大专栏系列
为了方便大家更系统的学习,我们搭配了一系列的大专栏,包括:
多传感器融合感知标定全栈课程;
多传感器标定/融合感知/模型部署全栈课程;
感知算法与模型部署全栈教程;
自动驾驶全栈算法工程师系列;
多模态融合感知大专栏;
自动驾驶全栈大专栏教程;
规划控制&轨迹预测大专栏;
双十二钜惠来啦!扫码领取
扫码添加助理咨询课程
写在后面
自动驾驶之心平台建立以来,团队已经和数千位小伙伴深入交流过。有名校博士、行业leader、科研大牛,也有初入职场、不满足现状的新人,亦有懵懵懂懂即将结束学生生涯,慌忙应对毕业和就业的小伙伴。汽车人感受最大的有两点:一是明晰自己未来的路,二是即刻行动起来。汽车人也一直秉持着这两点原则,所以团队一致决定走自己的路,从0自研课程,严控质量,不合格就无限期打磨,真的能让大家学到东西。除此之外,我们还创办了自动驾驶之心知识星球,目前已经超过2200人,我们对星球的定位是国内最大的自动驾驶资源共享的私密交流社区(技术+行业),里面输出的都是行业最新最实用的技术方案,直接面向工业级项目,还有很多学术界的idea、求职、方向选择上的建议。嘉宾基本都是行业的算法专家,以及国内外知名高校的博士,能够为大家解决学术和工作上的难题,甚至包括怎么投稿......


未来,自动驾驶之心不会把自己局限在自媒体和课程培训上,我们希望汇聚更多的行业资源和机会,打造一个全方位、多功能的自动驾驶技术分享和资源共享的平台。我们始终认为一个人的力量是有限的,只有汇聚更多人的力量,让更多的人享受行业发展的红利才是更有意义的事情。未来我们会多多尝试,挖掘更多潜在的机会,绝对不会让大家失望,也愿大家能和我们一起继续前进。














 1202
1202











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









