






上个月小米su7发布为新能源汽车及各行业带来了超高热度,自动驾驶技术也再次被关注到。近两年自动驾驶也成为了各大研究院和高校、会议期刊的热门课题。 目前,自动驾驶算法领域大家研究比较多的技术不外乎——多任务学习、BEV感知、深度强化学习等。前沿的算法推动自动驾驶系统在感知、决策和规划等多个方面的进步,为实现更安全、高效的自动驾驶技术落地提供了支撑。
研梦非凡的《自动驾驶前沿算法及模型部署系列课程》已有1700多人观看! 课程主要内容包括:从算法「自动驾驶感知算法、多传感器融合、点云深度学习技术、在线地图及高精地图定位」,到模型部署「自动驾驶模型部署、规控与预测、毫米波雷达、自动驾驶仿真」等囊括感知、决策和规划,丰富内容!共8节课,约700分钟!
扫码找助教开课

再领190篇感知、决策和规划必读论文+代码+数据集

之前我们的《自动驾驶前沿算法及模型部署系列课程》需要购买前沿直播课年度会员(价值129元)才可以看。 现在8节系列课仅售8.8元! 回馈老学员的支持,再照顾一下错过直播的新同学!都打包好了!全年回放!让大家看过瘾!
8节自动驾驶前沿算法及模型部署系列课程
第1节:自动驾驶感知算法,最近真火啊!卷篇顶会就这个!
自动驾驶简介、自动驾驶的发展历程
视觉感知在自动驾驶中的重要性
单目相机感知算法综述
单目相机的基本原理
视觉SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)
目标检测与跟踪
单目深度估计
BEV感知算法综述
BEV视角在自动驾驶中的优势
BEV中的目标检测与跟踪
BEVFormer介绍
BEVFormer的背景与动机
BEVFormer的网络结构
BEVFormer的实验结果与性能评估
未来展望与讨论
自动驾驶视觉感知的挑战与机遇
新技术与研究方向的探讨
第2节:自动驾驶多传感器融合,做这个工作好毕业
自动驾驶中传感器及其成像原理
激光雷达成像原理
相机成像原理
毫米波雷达
GPS和IMU
多传感器信息融合方法
Lidar-base的方法
Camera-base的方法
BEVFusion原理
第3节:自动驾驶点云深度学习,不学这个等于没学
点云的基本概念
点云分类分割算法
点云目标检测算法
基于point:PointRCNN
基于point:Fast PointRCNN
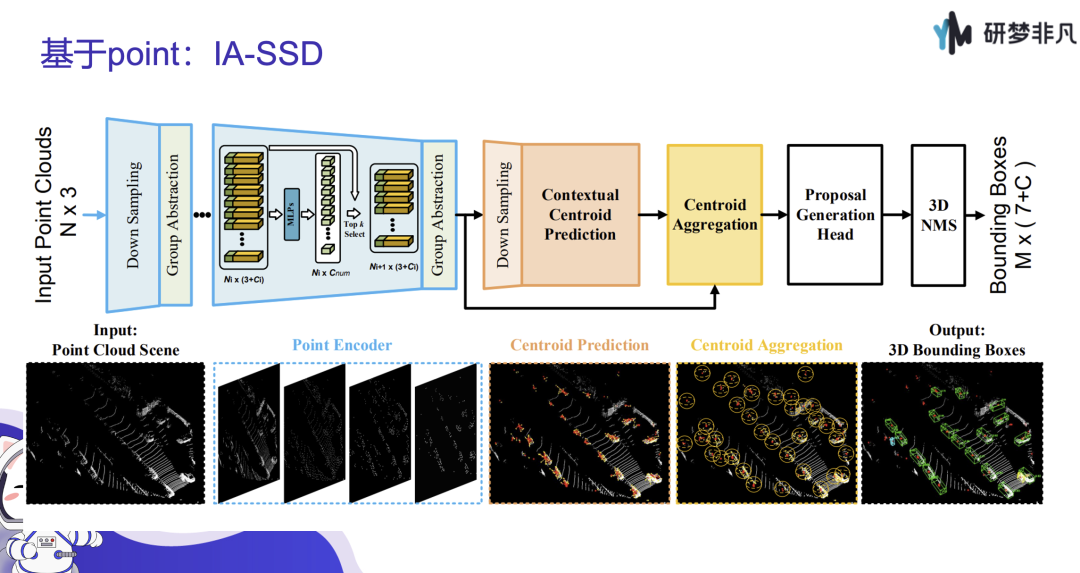
基于point:IA-SSD
基于Voxel:VoxelNet
基于Voxel:PointPillars
基于Point-Voxel:PV-RCNN
点云应用前瞻
第4节:自动驾驶高精地图,做过才知道难在哪里
MapTR论文核心要点
MapTR高精地图研究背景+创新点
算法框架
MapTR算法实验
新颖的地图元素建模方法
基于MapTR的实时建图
扫码直接购买课程
购买后找助教拉你进自动驾驶交流群,感兴趣可以来哈!有惊喜群福利!
第5节:自动驾驶模型部署,算法落地这个最重要
自动驾驶简介、自动驾驶的发展历程
自动驾驶技术的核心组成部分:感知、决策、控制
自动驾驶模型部署的重要性和挑战
模型部署的基本概念和流程
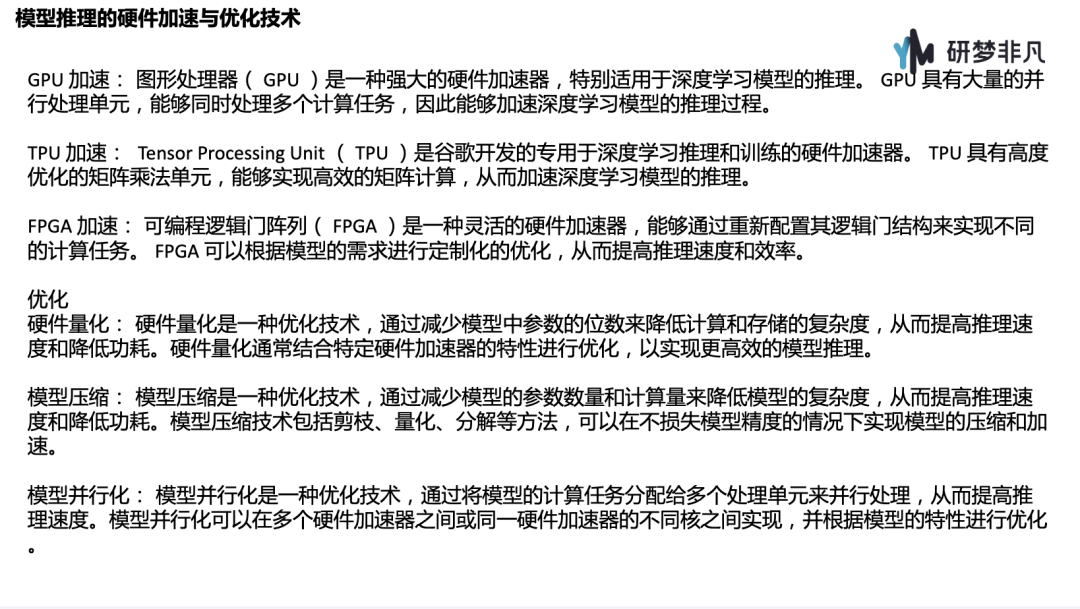
模型推理的硬件加速与优化技术
基于云端和边缘端的模型部署比较与选择
自动驾驶系统中的实时性与效率需求
安全性与可靠性保障措施
模型更新与迭代的管理与部署策略
实时监控与故障排除
部署后的模型性能评估与优化策略
实际案例分析:自动驾驶模型部署的挑战与解决方案
未来自动驾驶模型部署的趋势与展望
自动驾驶模型部署中的人才需求与发展机会
第6节:规控与预测自动驾驶关键技术
导论与基础知识: 介绍自动驾驶技术的基本概念、发展历程和应用场景,以及相关领域的基础知识。
环境感知与感知模块: 讨论如何通过传感器获取车辆周围环境的信息,以及如何使用机器学习和计算机视觉技术对这些信息进行处理和分析。
决策与规划算法: 介绍自动驾驶车辆如何基于环境感知的信息做出决策和规划路径,以及常用的决策算法和路径规划算法,如马尔科夫决策过程(MDP)、强化学习等。
车辆控制与执行: 探讨自动驾驶车辆如何通过控制系统执行规划好的路径,包括车辆动力学模型、控制器设计、执行器(如转向系统、油门和刹车系统)控制等。
场景预测与行为建模: 研究如何对周围车辆和行人的行为进行建模和预测。
数据集与评估方法: 介绍自动驾驶领域常用的数据集和评估方法,如KITTI、Cityscapes等数据集,以及评估自动驾驶系统性能的指标和方法。
安全性与道德问题: 探讨自动驾驶技术所涉及的安全性和道德问题。
案例分析与实践项目: 结合实际案例和项目,深入了解自动驾驶技术的应用和挑战。
第7节:自动驾驶毫米波雷达必学的15个知识点
自动驾驶简介、自动驾驶的发展历程
自动驾驶技术的核心组成部分:感知、决策、控制
毫米波雷达在自动驾驶中的重要性和应用场景
毫米波雷达感知算法综述
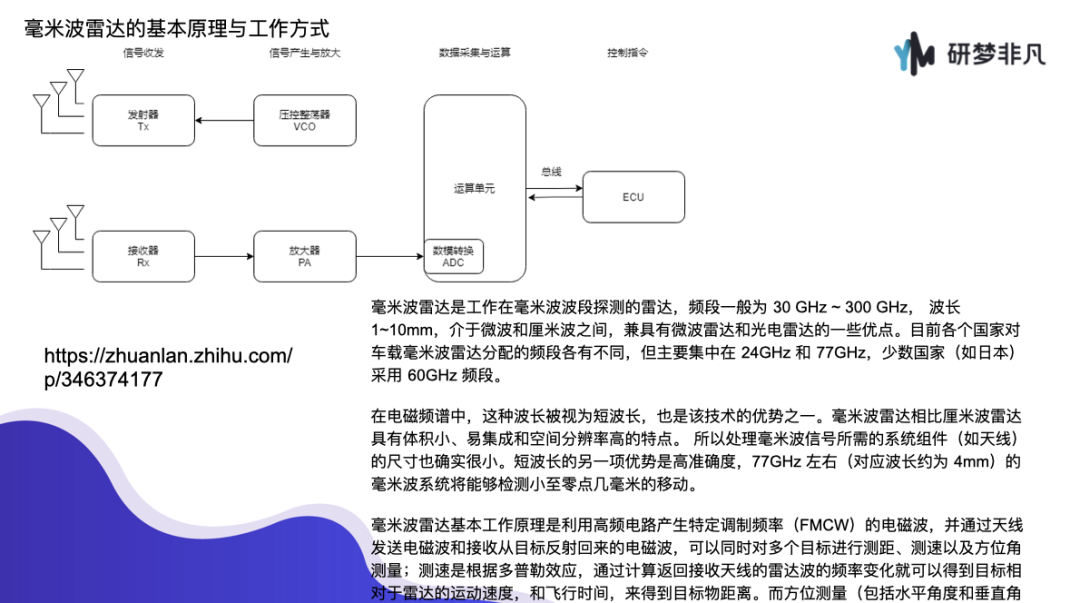
毫米波雷达的基本原理与工作方式
毫米波雷达数据处理与目标检测
毫米波雷达SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)
毫米波雷达与其他感知技术的融合与协同
毫米波雷达数据的特点与处理方法
毫米波雷达数据融合与传感器融合策略
毫米波雷达在自动驾驶系统中的实时性与效率需求
毫米波雷达数据的安全性与可靠性保障措施
毫米波雷达技术的发展趋势与未来展望
毫米波雷达在自动驾驶中的实际应用案例分析
毫米波雷达自动驾驶的挑战与解决方案
毫米波雷达自动驾驶的人才需求与发展机会
第8节:自动驾驶仿真,可是上了Nature封面了呢!
自动驾驶简介、自动驾驶的发展历程
自动驾驶技术的核心组成部分:感知、决策、控制
自动驾驶仿真的重要性和应用场景
自动驾驶仿真平台综述:CARLA、LGSVL、Apollo等
自动驾驶仿真的基本原理与工作方式
仿真环境的构建与场景设计
虚拟感知传感器的仿真与数据生成
自动驾驶算法的集成与验证
仿真评估指标与性能评估方法
仿真与真实场景的数据对齐与验证
仿真平台的实时性与效率需求
仿真结果的准确性与可靠性保障措施
自动驾驶仿真技术的发展趋势与未来展望
自动驾驶仿真在实际应用中的案例分析
自动驾驶仿真的挑战与解决方案
自动驾驶仿真技术的人才需求与发展机会
扫码直接购买课程
购买后找助教拉你进自动驾驶交流群,感兴趣可以来哈!有惊喜群福利!
研途(研梦非凡)专注考研行业教育10余年,深知考研成功不是终点。研究生只是科研的开始,大家还需要我们帮助科研论文写作指导!
如果你是cv方向/nlp方向/机器学习/深度学习及AI+金融,医疗,交通等方向的同学,需要ccf a-c会议,sci一区-四区期刊,南大/北大核心论文都可以来研途(研梦非凡)匹配到合适的科研论文指导。
(下面是我们根据自动驾驶之心的粉丝需求整理的可指导的研究方向和现有idea!)
自动驾驶研究方向
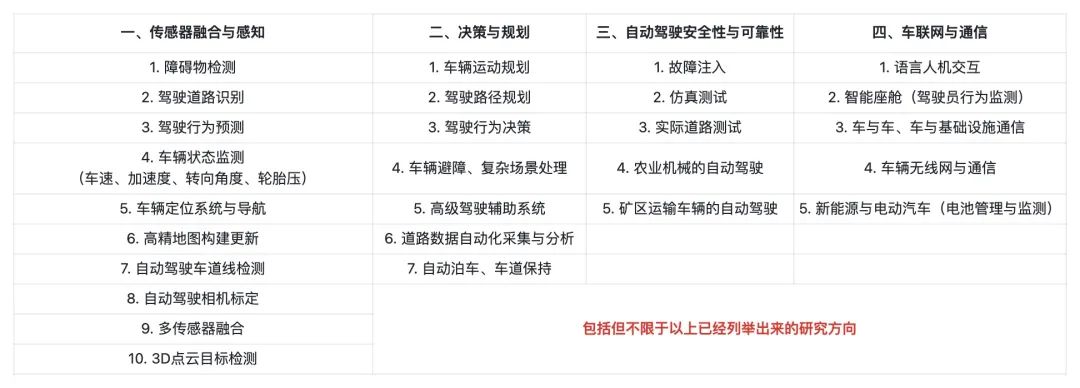
自动驾驶方向科研常用方法

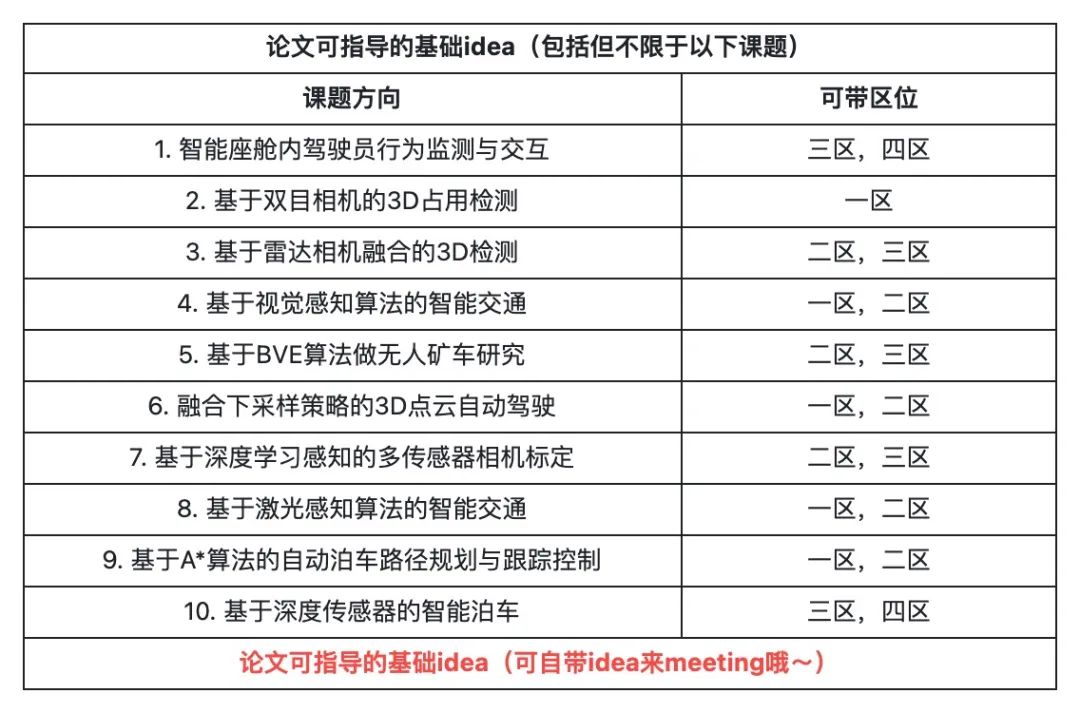
自动驾驶方向现准备好的idea
扫码找助教了解更多方向/验证自己的idea是否可行👇

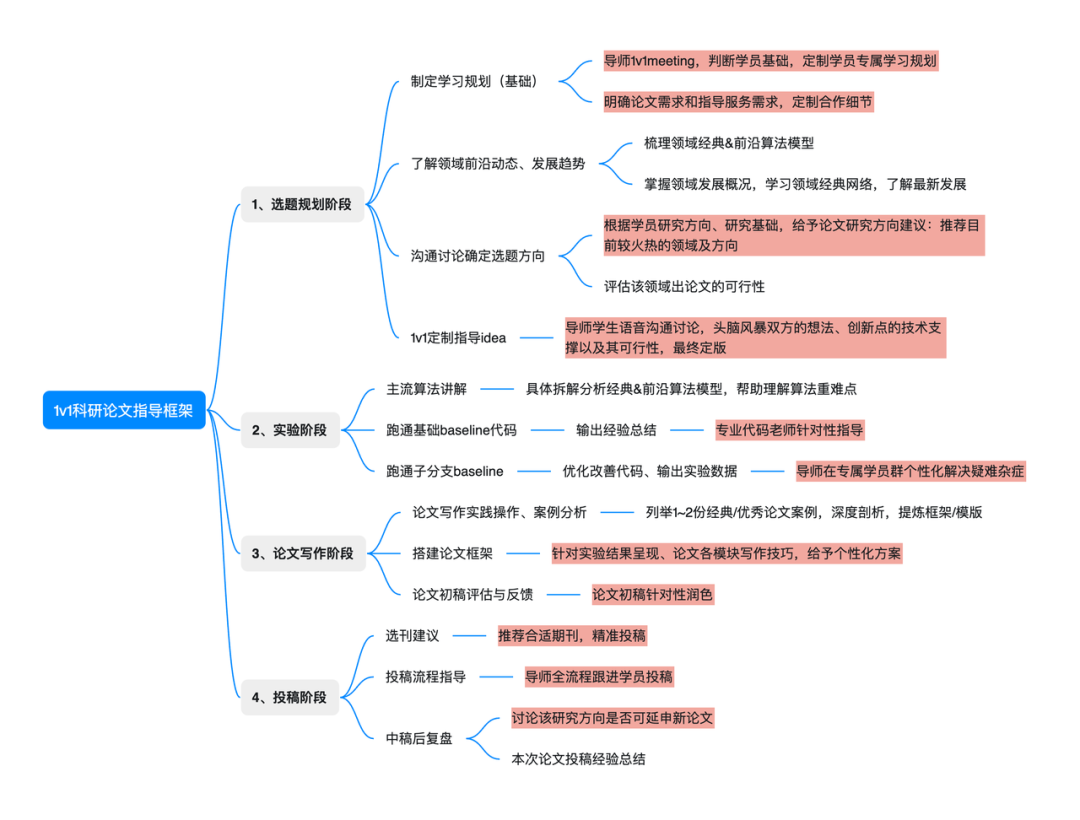
研梦非凡科研论文指导
方案一:1v1定制化论文指导
按不同的需求(选题阶段,实验阶段,成稿阶段)分别收费,区别于其他1v1论文辅导收全程指导费。
针对在完成论文的过程中某些部分遇到难题,而找不到路径的同学,协助其用更少的费用快速地解决问题。
定制1v1论文辅导扫码咨询助教👇

方案二:1对1全程论文指导
全程论文指导的服务适合以下需求的同学
非常适合科研小白:有科研需求,想融会贯通地使用算法模型,了解前沿进展和方向;
非常适合转专业和研究领域做敲门砖用:系统提升算法理论,高效掌握算法设计及创新思路,快速了解论文撰写技能;
适合留学/申硕/申博提升自己背景实力:QS排名前100大学博士生/顶会审稿人/教授导师/为你提供最具性价比的科研提升规划。
全程1v1论文辅导扫码咨询助教👇

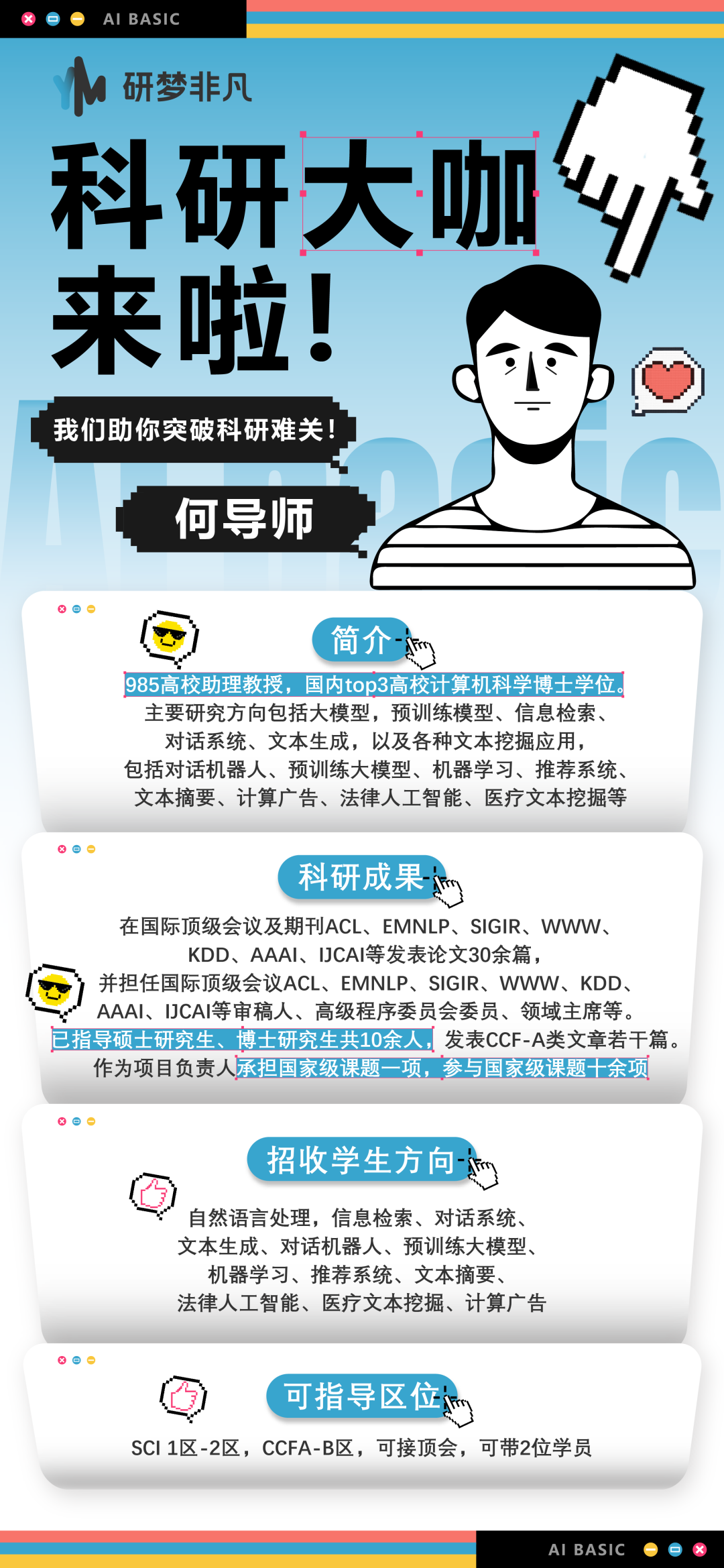
导师介绍
研梦非凡的导师来自海外QStop200、国内华五、C9、985高校的教授/博士导师/博士后,世界500强公司算法工程师,以及国内外知名人工智能实验室研究员。
这是一支实力强大的高学历导师团队,在计算机科学、机器学习、深度学习等领域,积累了丰富的科研经历,研究成果也发表在国际各大顶级会议和期刊上,在指导学员的过程中,全程秉持初心,坚持手把手个性化带教。包括但不限于以下导师~~
<<< 左右滑动见更多 >>>
扫码加助教为你匹配合适课题的大牛导师

研梦非凡科研福利
💡90分钟人工智能零基础入门课免费领
💡7小时科研论文写作系列课免费领
💡14节前沿论文直播课程免费领
💡50小时3080 GPU算力免费领:
💡400篇4月论文资料大合集免费领
💡自动驾驶之心粉丝报名1v1科研论文指导减学费!
▼ 扫码领取以上6重粉丝专属科研福利!



















 3565
3565

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









