






点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
今天自动驾驶之心为大家分享一篇从4D雷达点云中进行高效目标检测工作:RadarPillars。如果您有相关工作需要分享,请在文末联系我们!
自动驾驶课程学习与技术交流群事宜,也欢迎添加小助理微信AIDriver004做进一步咨询
编辑 | 自动驾驶之心
原标题:RadarPillars: Efficient Object Detection from 4D Radar Point Clouds
论文链接:https://arxiv.org/pdf/2408.05020
作者单位:曼海姆应用科学大学

论文思路:
汽车雷达(radar)系统已经发展到不仅提供距离、方位角和多普勒速度,还能提供俯仰数据。这一额外的维度使得4D雷达可以表示为3D点云。因此,现有的用于3D目标检测的深度学习方法,最初是为LiDAR数据开发的,经常被应用于这些雷达点云。然而,这忽略了4D雷达数据的特殊特性,例如极端稀疏性和速度信息的最佳利用。为了弥补这些在现有技术中的不足,本文提出了RadarPillars,一种基于柱状结构的目标检测网络。通过分解径向速度数据,引入PillarAttention进行高效特征提取,并研究层缩放以适应雷达稀疏性,RadarPillars在View-of-Delft数据集上的检测结果显著优于现有技术。重要的是,这在显著减少参数量的同时,实现了超越现有方法的效率,并在边缘设备上实现了实时性能。
论文设计:
在自动驾驶和汽车应用的背景下,雷达作为一种关键的感知技术脱颖而出,使车辆能够检测到周围的物体和障碍物。这一能力对于确保各种自动驾驶功能的安全性和效率至关重要,包括碰撞避免、自适应巡航控制和车道保持辅助。雷达技术的最新进展导致了4D雷达的发展,它结合了三个空间维度以及一个额外的多普勒速度维度。与传统雷达系统不同,4D雷达引入了作为第三维度的俯仰信息。这一增强功能使得雷达数据可以表示为3D点云,类似于LiDAR或深度感应相机生成的点云,从而能够应用之前仅限于这些传感器的深度学习方法。
然而,尽管来自LiDAR检测领域的深度学习技术已经被适配到4D雷达数据上,但它们并没有充分探索或适应其独特特性。与LiDAR数据相比,4D雷达数据显著稀疏。尽管存在这种稀疏性,雷达独特地提供了速度作为特征,这在各种场景中有助于移动物体的检测,例如在LiDAR传统上难以应对的远距离场景中[1]。在View-of-Delft数据集中,平均每次4D雷达扫描仅包含216个点,而相同视野内的LiDAR扫描包含21,344个点[2]。对此,本文提出了RadarPillars,一种专门为4D雷达数据量身定制的新型3D检测网络。通过RadarPillars,本文填补了当前技术中的空白,并在以下几个方面做出了贡献,大幅提升了性能,同时保持了实时能力:
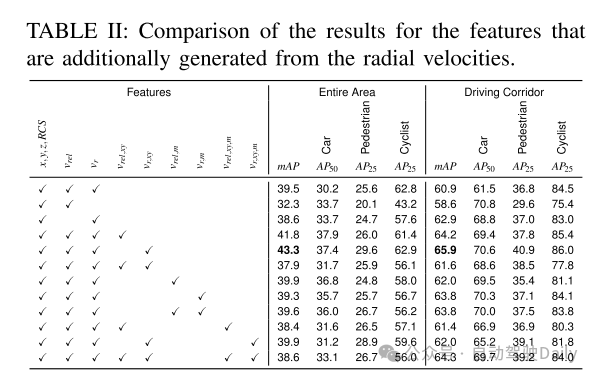
增强速度信息的利用:本文分解径向速度数据,提供额外的特征,从而显著提升网络性能。
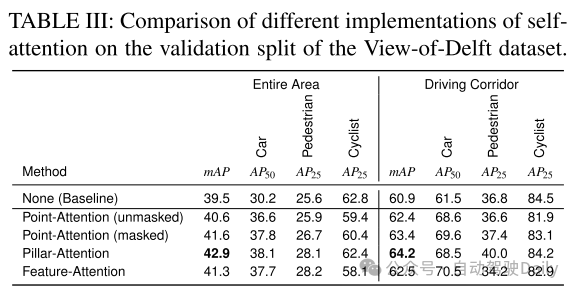
适应雷达稀疏性:RadarPillars利用柱状表示法[3]进行高效的实时处理。本文利用4D雷达数据固有的稀疏性,并引入PillarAttention,一种将每个 pillar 作为一个 token 处理的新型自注意层,同时保持效率和实时性能。
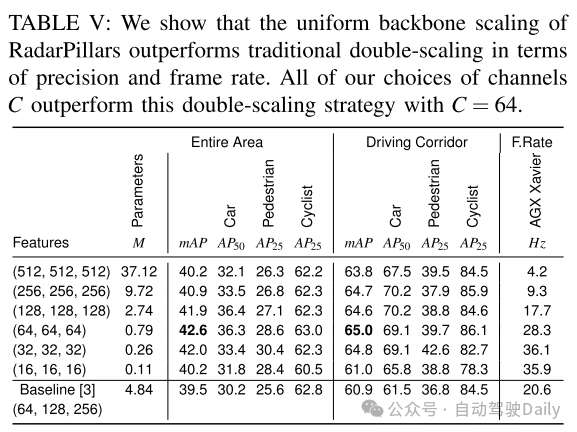
针对稀疏雷达数据的扩展:本文展示了雷达数据的稀疏性可能导致检测网络中信息量较少的特征。通过均匀网络,本文不仅提升了性能,还显著减少了参数量,从而提高了运行效率。
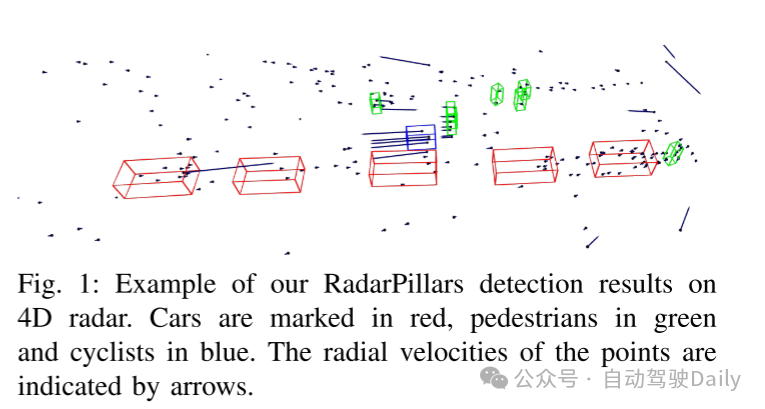
图1:RadarPillars在4D雷达上的检测结果示例。汽车用红色标记,行人用绿色标记,骑行者用蓝色标记。点的径向速度由箭头指示。
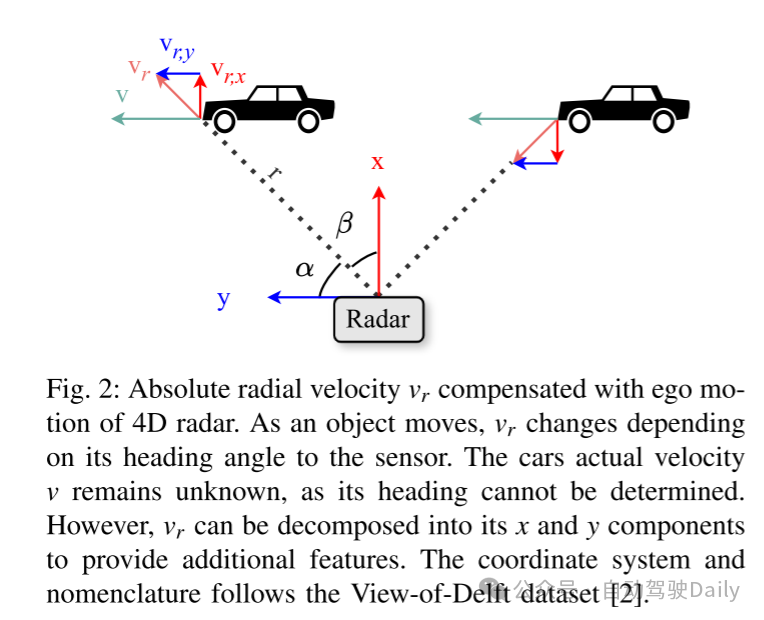
图2:补偿了4D雷达自车运动的绝对径向速度$ v_r $。随着物体的移动,$ v_r $会根据其相对于传感器的航向角发生变化。由于其航向无法确定,汽车的实际速度$v$仍然未知。然而,$ v_r $可以分解为其$x$和$y$分量,以提供额外的特征。坐标系统和命名法遵循View-of-Delft数据集[2]。
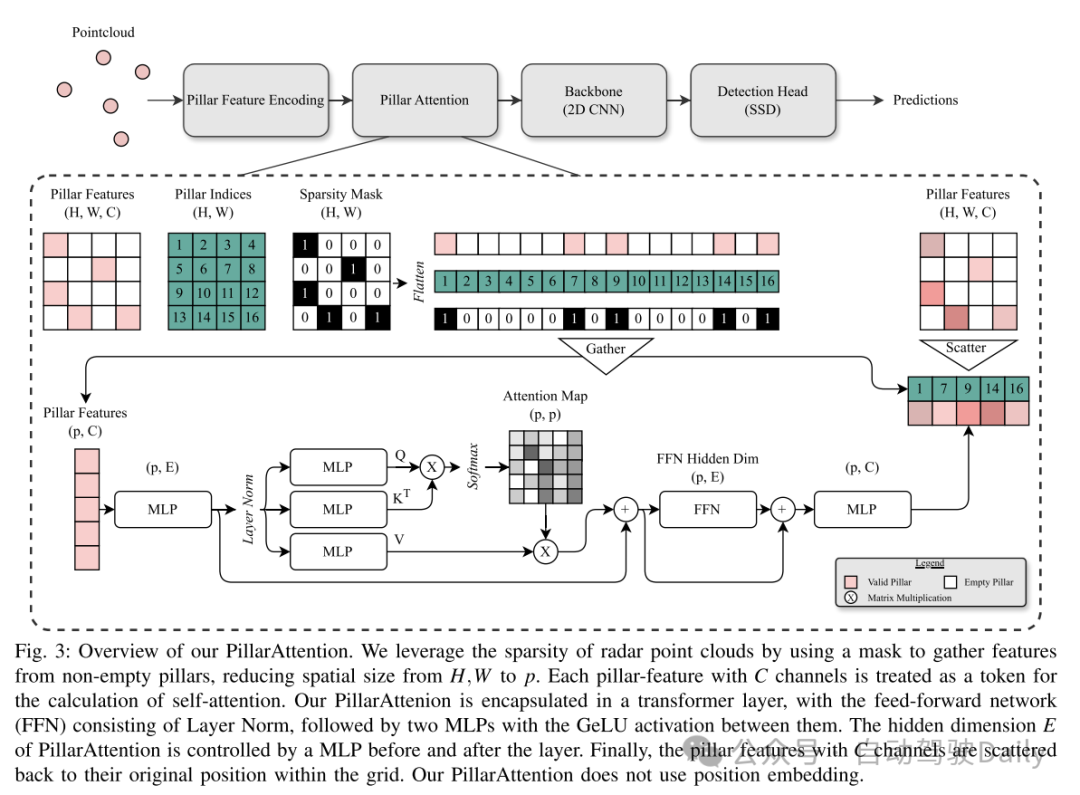
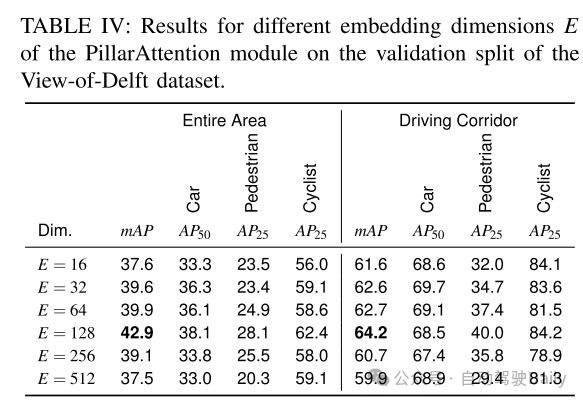
图3:PillarAttention概述。本文利用雷达点云的稀疏性,通过使用掩码从非空 pillars 中收集特征,将空间大小从$H, W$减少到$p$。每个具有$C$通道的柱状特征被视为计算自注意力的一个 token 。本文的PillarAttention封装在一个Transformer层中,前馈网络(FFN)由层归一化(Layer Norm)和两个中间带有GeLU激活的MLP组成。PillarAttention的隐藏维度$E$由层前后的MLP控制。最后,具有$C$通道的柱状特征被散射回其在网格中的原始位置。本文的PillarAttention不使用位置嵌入。
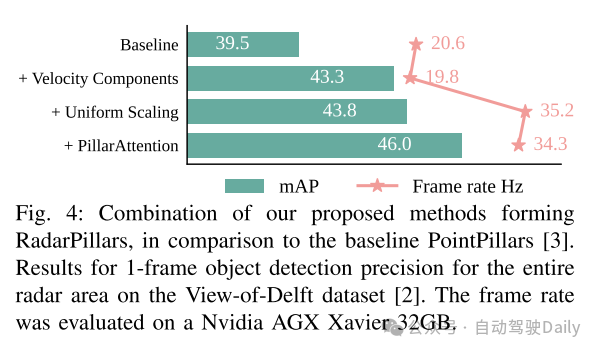
图4:本文提出的方法组合形成RadarPillars,与基准方法PointPillars [3]的比较。在View-of-Delft数据集[2]上,整个雷达区域的一帧目标检测精度结果。帧率是在Nvidia AGX Xavier 32GB上评估的。
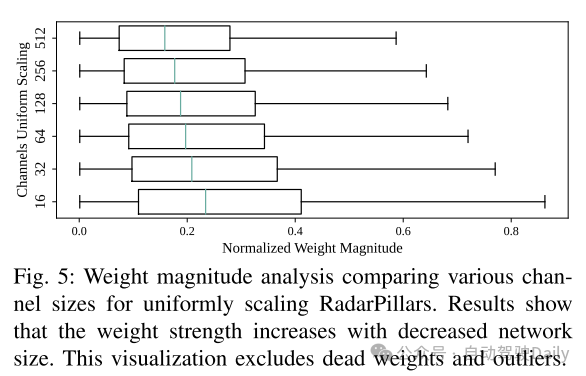
图5:权重幅度分析比较不同通道大小的均匀缩放RadarPillars。结果显示,随着网络规模的减小,权重强度增加。本可视化排除了无效权重和异常值。
实验结果:
总结:
本文提出了RadarPillars,利用4D雷达数据进行目标检测的新方法。作为一个仅有 0.27 M 参数和1.99 GFLOPS的轻量级网络,RadarPillars在检测性能方面建立了新的基准,同时实现了实时能力,显著超越了当前的先进技术。本文研究了雷达速度的最佳利用,以为网络提供增强的上下文。此外,本文引入了PillarAttention,这是一种创新的层,将每个 pillar 视为一个 token ,同时确保效率。本文展示了均匀缩放网络在检测性能和实时推理方面的优势。以RadarPillars为基础,本文未来的工作将集中于通过优化主干网络和探索无锚检测头来提升运行时间。另一条研究途径是研究使用仅包含PillarAttention的Transformer层进行端到端的目标检测,或将有前景的LiDAR方法[38], [39]适用于雷达。此外,本文还提出将RadarPillars扩展到其他传感器数据模态的潜力,如深度传感器或LiDAR。
引用:
@ARTICLE{2024arXiv240805020M,
author = {{Musiat}, Alexander and {Reichardt}, Laurenz and {Schulze}, Michael and {Wasenm{\"u}ller}, Oliver},
title = "{RadarPillars: Efficient Object Detection from 4D Radar Point Clouds}",
journal = {arXiv e-prints},
keywords = {Computer Science - Computer Vision and Pattern Recognition},
year = 2024,
month = aug,
eid = {arXiv:2408.05020},
pages = {arXiv:2408.05020},
doi = {10.48550/arXiv.2408.05020},
archivePrefix = {arXiv},
eprint = {2408.05020},
primaryClass = {cs.CV},
adsurl = {https://ui.adsabs.harvard.edu/abs/2024arXiv240805020M},
adsnote = {Provided by the SAO/NASA Astrophysics Data System}
}投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!重磅,自动驾驶之心科研论文辅导来啦,申博、CCF系列、SCI、EI、毕业论文、比赛辅导等多个方向,欢迎联系我们!
① 全网独家视频课程
BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 网页端官网:www.zdjszx.com
网页端官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
国内最大最专业,近3000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】全平台矩阵
















 3940
3940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









