






今年的智驾只有一个声音,那就是端到端+大模型!无论是完全端到端,还是专注于planner的模型,各家公司基本都投入较大人力去研发,小鹏、蔚来、理想、华为都对外展示了其端到端自动驾驶方案,效果着实不错,非常有研究价值。
为什么需要端到端?
首先我们聊一下当前的主流自动驾驶方案,主要核心部分包括:感知模块、预测模块、规控模块。每个模块相对独立,感知模块给预测模块提供动静态障碍物信息;预测模块为规控模块提供规划的参考,规划再转换为控制指令。从传感器端到控制端,需要多个功能支持,这就不可避免导致了累积误差,一旦碰到问题,需要整个pipeline做分析。而且每个模块的优化,并不能保证整个系统达成最优解。
这个时候,就希望有一种模型能够完成感知信息的无损传递,即从传感器端到输出控制策略端,这也是端到端自动驾驶提出的原因。端到端核心是优化最终目标且全局可导,作为一个完整的优化任务来看,直接求最优解,而不是先求感知再求规控的最优解。
可以看出,和以前模块化的方法不同,端到端不再要求算法工程师各自为战,搞感知的就搞感知,搞规控的就搞规控。而是需要全栈!什么都要懂,感知的难点要端到端解!规控的难点也要端到端来解!!那么端到端到底涉及哪些内容呢?今天就带大家一起看下我们『自动驾驶之心知识星球』关于端到端自动驾驶的相关内容和前沿讨论!涉及综述/数据集/前沿算法的汇总、科研界顶级大佬直播、岗位招聘、日常讨论、从业感悟等等,应有尽有~

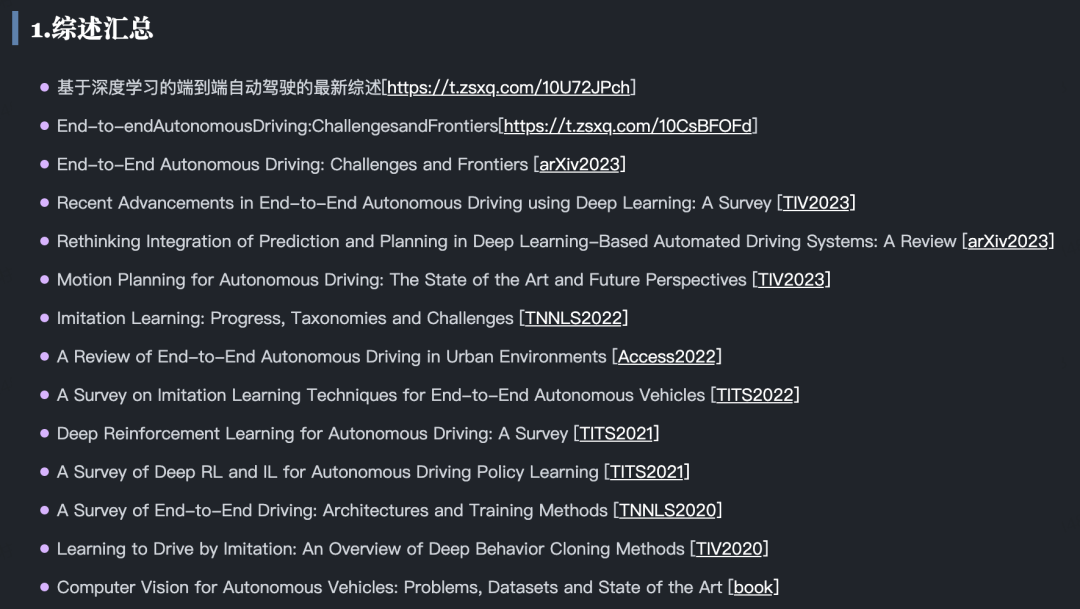
综述
首先离不开综述的汇总!这些综述系统性的归纳近几年的研究工作并分门别类,很适合小白和找方向的小伙伴:
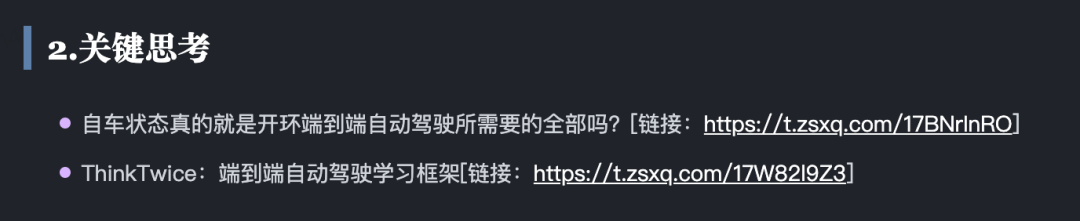
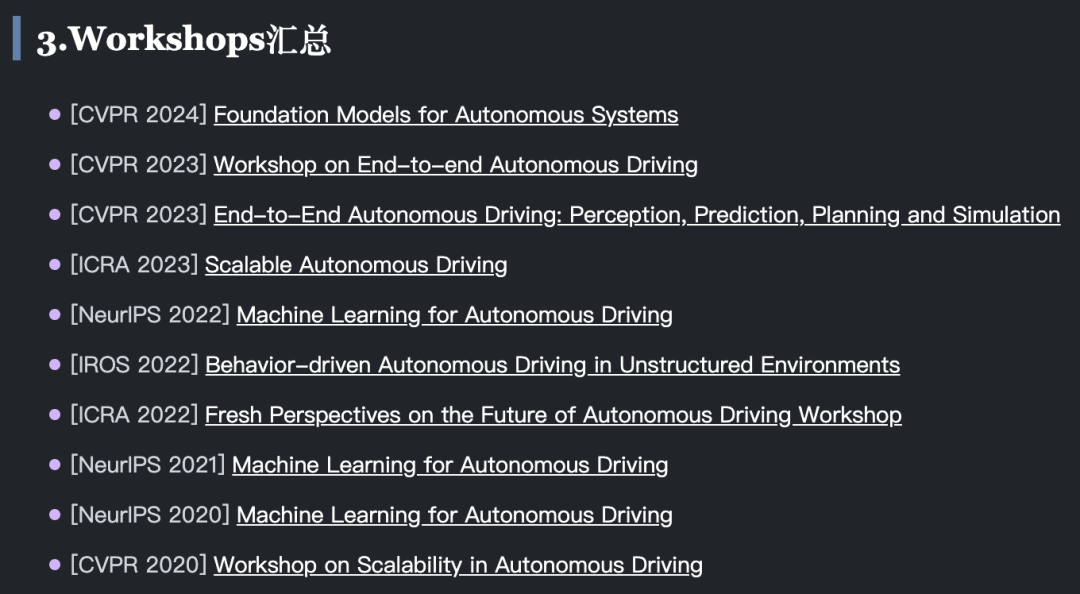
关键思考和Workshop
其次是一些对于端到端自动驾驶的深入思考及业内最前沿的workshop:
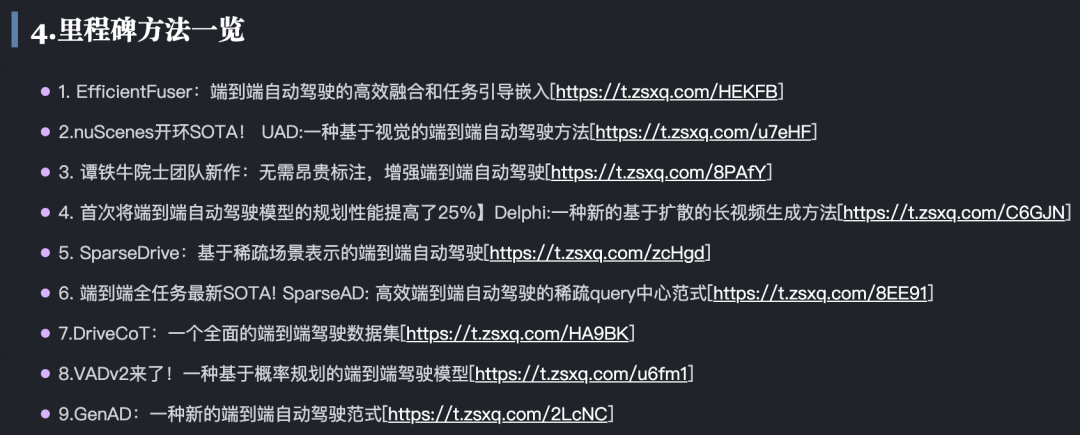
里程碑算法一览
任何算法的发展离不开一些里程碑的奠基之作:
自动驾驶与视觉大语言模型
端到端与视觉大语言模型的结合也是一大趋势:
世界模型与强化学习相关
自世界模型提出以来,也有相当多端到端世界模型工作:
多传感器融合与端到端
端到端自然也离不开多传感器融合:
多任务学习与端到端
多任务学习范式的端到端是当前落地的主流,UniAD便是代表作之一:
BEV与端到端自动驾驶
其他方向
当然还有很多与端到端自动驾驶相关的方向:

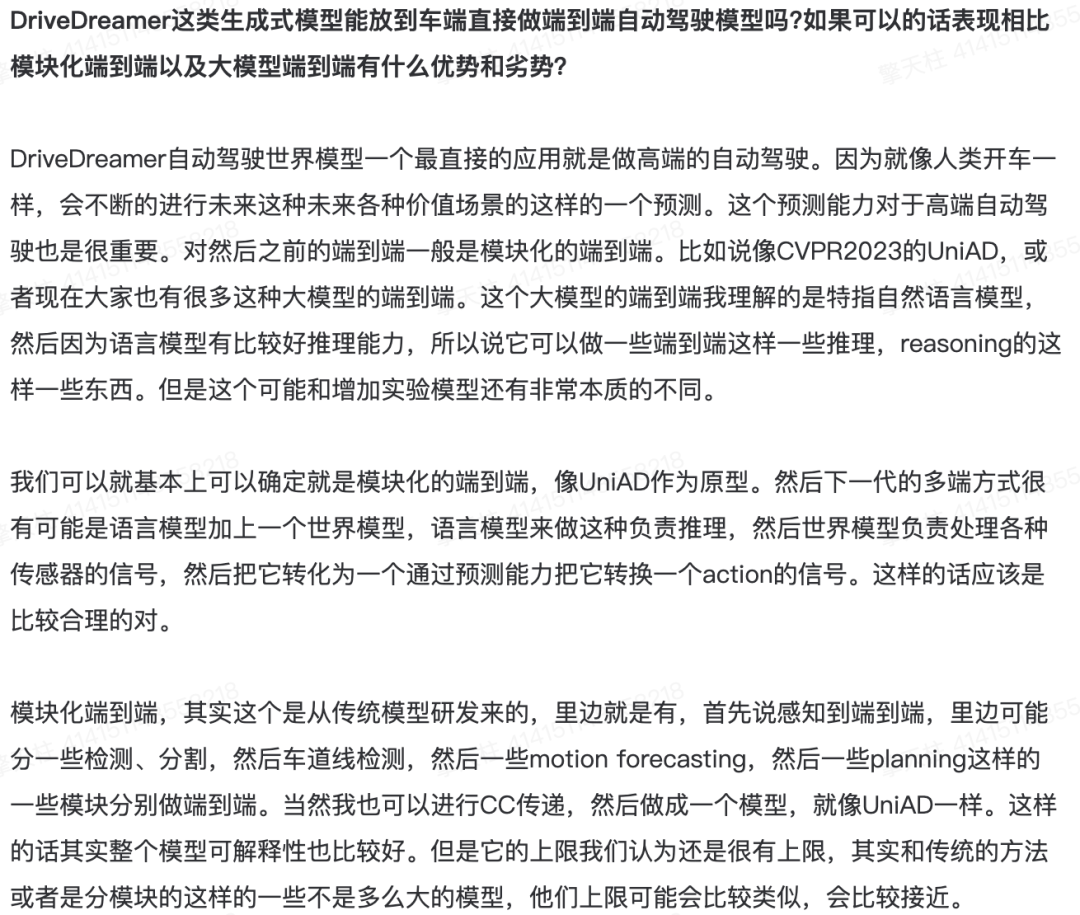
日常讨论
也不乏和诸多星友的日常讨论,这里也摘取一些分享:


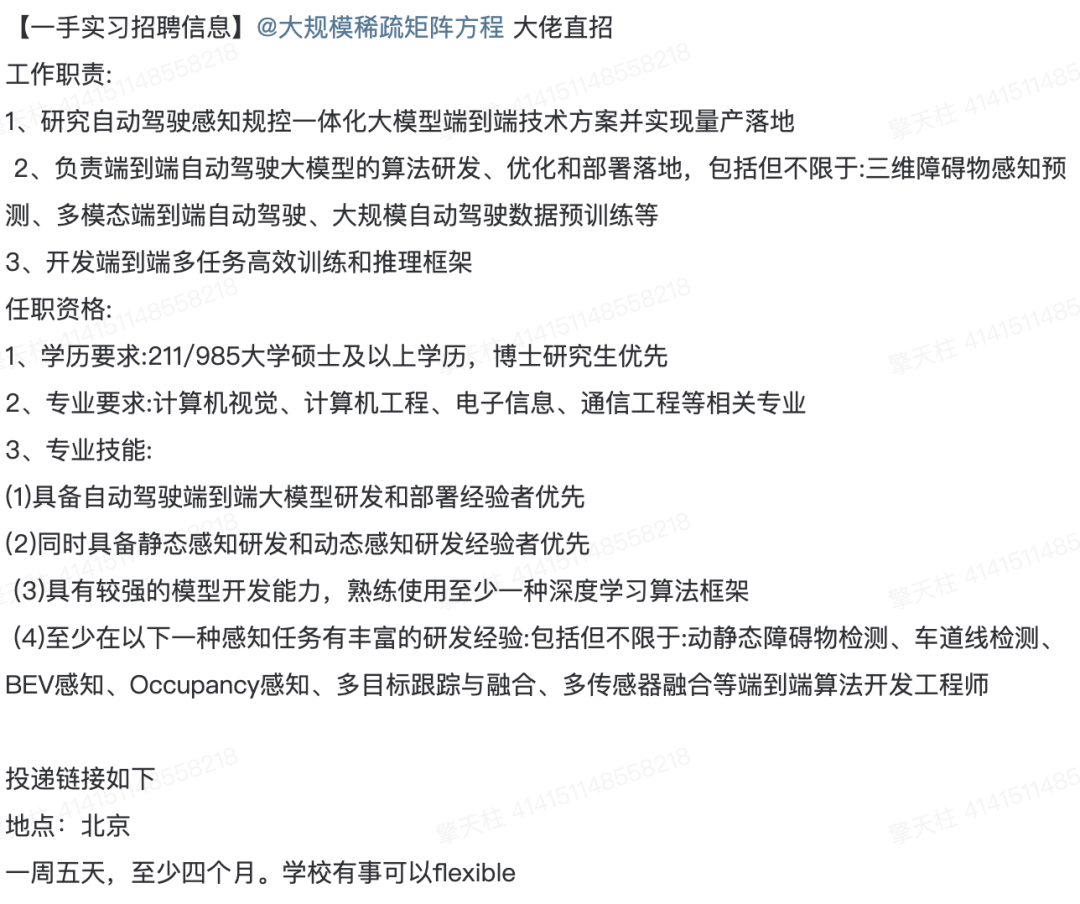
招聘信息
当然也少不了一手的招聘信息!
直播分享
更有顶级大佬的直播分享:
以上内容均摘自『自动驾驶之心知识星球』,欢迎加入与4000名从业人员一起变的更强!


















 2192
2192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









