






空间智能与具身智能视觉感知挑战赛
1
竞赛目的与意义
视觉感知是实现空间智能与具身智能的关键支撑技术,近年来在自动驾驶、智慧城市、机器人等场景中展现出广泛应用前景。特别是强化学习等技术在智能体感知与决策中的深度融合,正在成为推动该领域突破的重要力量。
•
推动高效、高质量的空间智能和具身智能技术的研究。
•
探索强化学习、计算机视觉、图形学等前沿方法的创新。
•
促进神经渲染、场景优化和机器人抓取等方向的应用。

2
竞赛组织方
组织者:彭君然、陈磊、唐彦嵩、刘健、许修为、尹航、孙浩文、卫浩宇、刘旭阳、赵鑫
指导专家:张兆翔、鲁继文、殷绪成
组织单位:北京科技大学、清华大学、中国科学院自动化研究所、北京九章云极科技有限公司、塞弗卓盈(上海)科技有限公司
赞助商及技术支持单位:北京九章云极科技有限公司
媒体支持单位:塞弗卓盈(上海)科技有限公司
联系电话:13051937326
联系邮箱:
prcvcompetition@126.com
微信交流群:报名邮件回复确定
参赛者要求:
按自愿报名的原则,参赛团队和成员的组成可以为:
•
各培养单位正式注册教师、在读研究生以及博士生。
•
国内各研究团体、企事业单位。
3
报名方式
以个人或团队方式均可通过邮件方式报名参赛,每个参赛队伍人员不超过5人,每名参赛选手只能参加1个参赛队。每个参赛队伍在竞赛截止时间之前最多可更新2次结果,截止时间之后不能再更新结果。参赛队发送报名信息至prcvcompetition@126.com。
邮件标题格式“空间智能与具身智能视觉感知挑战赛_(参赛队名称)”。
邮件内容应包括个人或团队基本信息、负责人基本信息、参赛人数、联系方式(手机,邮箱),所有表格中对应成员的信息均为必填项,填写后保存为excel的格式,文件命名为“空间智能与具身智能视觉感知挑战赛_(参赛队名称).xlsx”。
组织方收到邮件并与报名者确认后,报名成功。
报名截止日期为:7月31日。
序号 角色 姓名 单位 学历 手机 邮箱 |
1 队长 |
2 队员 |
3 队员 |
4 队员 |
5 队员 |
4
重要时间节点
时间 | 具体安排 |
6月10日 | 组委会在网站公布比赛任务、参赛办法和评比方式。 |
6月11日 | 参赛队伍报名及邮件资格确认。 |
7月21日 | 比赛开始,组委会发布比赛训练集。各参赛队在规定时间内完成比赛任务,将结果按照规定的格式上传至指定位置。每个参赛队只能提交一次结果参与评测(如果需要修改,请在规定时间内联系组委会进行修改)。 |
9月1日 | 评委按照规定的评测方法,验证各队程序执行结果,对结果进行评测,评比各队名次。 |
10月15日 | 在第八届中国模式识别与计算机视觉大会PRCV2025竞赛单元介绍获奖单位比赛方法,为获奖团队颁奖。 |
5
竞赛数据及计算资源
• 竞赛数据:
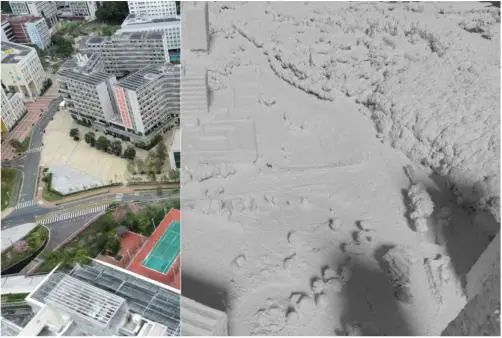
组织方将提供竞赛使用的真实和仿真数据集,包括2个大规模场景的多视角无人机航拍图,500-1000张1k分辨率的图片;具身智能赛道组织方将提供具体的仿真环境场景和任务定义。
• 计算资源:
○ 赞助商九章云极将免费提供8卡H800 GPU算力,供组织方对参赛团队提交的算法模型进行验证与系统测试。
○ 竞赛阶段使用自备算力或九章智算云(Alaya NeW Cloud)提供的H800算力包,平台注册链接:
https://www.alayanew.com/backend/register?utm_source=PRCV
1张H800卡运行1小时为2.56度算力,统一定价为18元/度。
九章智算云(Alaya NeW Cloud)为本次竞赛提供了H800弹性容器集群资源(最大32卡并行度,随开随用,按量付费),并赞助双重特惠活动及奖金:
第1重优惠——新用户专享算力包体验套餐,1度算力低至6元

第2重优惠——H800弹性算力包订阅套餐,H800 8卡每月订阅价仅4.2万

享受以上赞助优惠请联系九章云极专属客服:张先生 17865164680
赞助算力咨询请入群:

6
任务设置
竞赛分设空间智能与具身智能两个赛道:
赛道1:空间智能
本任务要求构建基于多视角航拍图像的城市场景三维重建模型,具体定义为:
•
输入:多视角空中俯拍RGB图像序列及对应的相机内外参数矩阵
•
输出:可渲染新视角的三维场景表征,以及由此提取得到的场景网格面片
赛道2:具身智能
本任务在动态遮挡仿真场景中完成抓取/杂物清理任务,具体定义为:
•
输入:Agent视角的RGBD图像、与任务有关的语义信息以及Agent的机械臂关节角等任务相关的机器人自我信息
•
输出:Agent在环境中执行的一系列动作,直至成功完成指定任务目标或判断任务失败
7
评价方法
赛道1:空间智能
评估流程包含两个维度:
1. 渲染质量,其评估流程为
(1) 组委会提供预设的相机位姿集合
(2) 参赛模型生成指定分辨率(如1024×1024)的RGB渲染图
评价指标:
PSNR(峰值信噪比)
2. 几何精度,其评估流程为
(1) 组委会提供场景的标准点云和有效测定范围
(2) 参数模型在给定的存储大小限制内生成网格面片,对其表面均匀采样得到预测的点云,并在有效测定范围内和官方标准点云对比,得到评价指标
评价指标:
F1-Score(精度和召回率综合评定指标)
最终成绩:
得分根据排名倒排得分,仅前20名计分有效,每项满分10分。
计算方式为0.6 x 渲染质量 + 0.4 x 几何精度。
赛道2:具身智能
评估流程划分为两个维度:
1. 任务完成度评估
用于评估机器人完成操作任务的精度与可靠性
评估流程:
(1) 任务设定与环境初始化
组委会提供若干标准动态遮挡场景,每个任务包含目标物体和指定目标位置。Agent初始位姿以及目标物体初始位姿将会在一定范围内随机初始化。
(2) 机器人执行
Agent自主完成感知、规划与操作,尝试完成指定目标的抓取与放置
(3) 评估数据记录
评价指标:
成功率。定义为:成功抓取并正确放置的次数 / 尝试次数
位姿平均误差。定义为:对于成功完成的任务,位姿误差为0,而对于失败的任务,位姿误差为物体最终位置与正确位置范围之间的最短归一化欧氏距离。如果姿态也在任务考察范围内,则加上Quaternion误差作为完整的位姿评价指标。
2. 执行效率评估
评价指标:
任务完成时间。定义:完成各项任务的累计归一化总耗时,对于超时任务则将任务完成时间指标记为1
路径效率。定义:路径效率 = 实际路径长度 / 理论最短路径长度
最终成绩:
两个维度的评价指标采用倒排得分,仅前20名计分有效,每项满分10分。
最终成绩将对三个维度的得分加权得到:0.5 x 完成度 + 0.5 x 执行效率。
8
提交方式
•
以指定格式提交结果(排名前列的会由主办方复现评估结果)。
•
附技术报告(不超过4页)说明方法细节。
•
通过竞赛平台上传,截止时间前完成提交。
9
奖项设置
竞赛每个赛道各设置(以下奖金及算力券由北京九章云极科技有限公司提供赞助):
一等奖1名(奖金6000元人民币、500度算力券)
二等奖2名(奖金各3000元人民币、200度算力券)
三等奖3名(奖金各1000元人民币、100度算力券)
优胜奖6名(奖金各500元人民币、50度算力券)
各参赛队伍根据比赛成绩均可获得由PRCV 2025组委会与组织单位等共同颁发的获奖证书和奖金。
10
知识产权等说明
•
各参赛队在赛前需签订数据使用协议,承诺本竞赛提供的测试数据集仅能用于本竞赛,不用于除本竞赛外的任何其他用途,并承诺数据用后即刻删除,不可扩散,组织方保留追究法律责任的权利。
•
各参赛队需要承诺本队提交的结果可重复,参赛队所有的方案、算法以及相关的知识产权均属于参赛队伍所有,组织方承诺履行保密义务,并不用于除本比赛外的任何其他用途。
•
参赛队伍应保证所提供的方案、算法属于自有知识产权。组织方对参赛队伍因使用本队提供/完成的算法和结果而产生的任何实际侵权或者被任何第三方指控侵权概不负责。一旦上述情况和事件发生参赛队伍必须承担一切相关法律责任和经济赔偿责任并保护组织方免于承担该等责任。
•
该项竞赛为公益性赛事,全程不收取参赛队伍任何费用。
•
竞赛期间,组委会坚持公开、公平、公正的原则。参赛结果评比由专业评审队完成,如参赛队伍对公布结果有异议,可申请成绩复核,申请通过后到组委会指定地点进行现场复核。
大会简介
第八届中国模式识别与计算机视觉学术会议(PRCV 2025)将于2025年10月15日-18日在上海国家会展中心举办。PRCV是国内模式识别和计算机视觉领域顶级学术盛会,也是国际上重要且受到国际学术界认可会议,进入CCF分区(CCF-C)。本届会议投稿截止时间为2025年6月30日,热忱邀约学术翘楚与产业精英踊跃投稿!大会将隆重颁发最佳论文奖、最佳论文提名奖、最佳学生论文奖等殊荣,伴以丰厚奖励。
会议还将邀请数十位领域顶尖专家共襄盛会。四位院士与国际巨擘的主旨报告高屋建瓴,八位国家级人才及 IEEE Fellow 的特邀演讲洞悉前沿,百余位国家级人才、企业专家参加的十余场专题论坛与讲习班涵盖学术前沿、产业应用与技术创新。女科学家论坛、竞赛论坛、博士生论坛等多元舞台交相辉映,为全球学者搭建展示卓越成果、碰撞思想火花的广阔天地。更有十余家先锋企业共襄会展盛况,深化“产学研”融合,助力模式识别与计算机视觉领域乘风破浪,勇攀高峰。
PRCV 2025 正在火热征稿中!现向广大科技工作者公开征集高质量、原创性的优秀英文学术论文。录用的论文将在大会上交流,会议论文集将由Springer出版社出版,并被EI和ISTP检索。您的参与不仅将为大会增添光彩,也将助力我国模式识别与计算机视觉领域迈向更高水平!
投稿网站:
https://www.prcv.cn/CallforPapers/


征稿网站
官方会议网站
组织机构
主办单位
|
|
中国图象图形学学会 | 中国人工智能学会 |
|
|
中国计算机学会 | 中国自动化学会 |




承办单位

上海交通大学
协办单位

AutoDL
钻石赞助

AutoDL
铂金赞助
腾讯优图
银牌赞助
达摩院 ✖ 湖畔实验室
联系方式
大会官网:https://www.prcv.cn/
联系咨询:prcv2025@163.com





距大会开幕还有 127 天
期待遇见一场技术巅峰的对话




















 6720
6720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









