







关键点:
1.设计一个新颖的网络来处理无序的点云数据;
2.pointnet网络可以被训练用来处理分类、部件分割和场景分割多种任务;
3.提供了数据实验和理论分析来验证方法的可行性和有效性;
4.展示了由网络中选定的神经元计算的3D特征,并对其性能进行了直观的解释。
网络结构
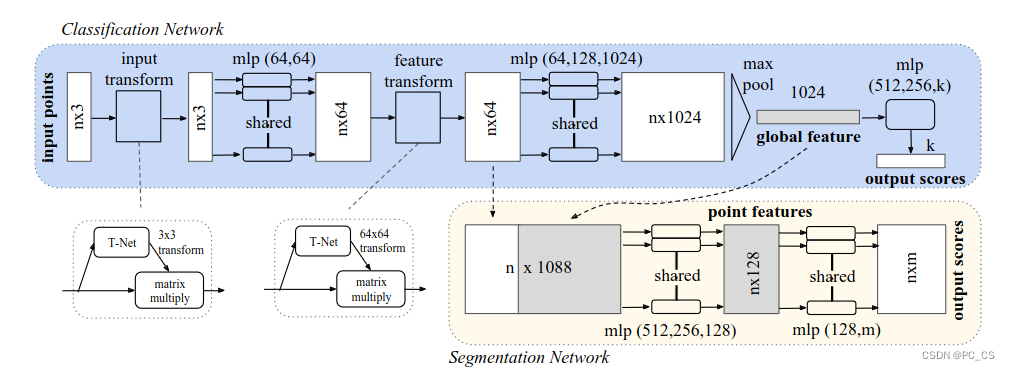
分类网络以n个点作为输入,应用输入和特征变换,然后通过最大池化来聚合点特征。输出是k个类的分类分数。分割网络是对分类网络的扩展。它连接全局和局部特征,并输出每个点的分数。“mlp”代表多层感知器,括号中的数字表示层的大小。Batchnorm用于具有ReLU的所有层。丢弃层用于分类网中的最后一个mlp。
输入数据特点:
1.无序性,点云之间的顺序排列是无序的(一个树木点云,点云的坐标固定,无论点的顺序如何排列,它依旧是树木的形状);
2.点之间是相互关联的,每个点之间存在空间距离,这意味着点不是孤立的,相邻的点形成了一个有意义的子集;
3.旋转不变性,通过旋转和平移点云数据的属性不会改变;
网络关键模块:
1.最大池化层作为一个对称函数来聚合来自所有点的信息;
理解这里的对称函数:在对称函数中,函数的输出值不随输入变数的排列而改变。从函数的形式中可以看出若输入变数排列后,方程式不会改变。而最大池化是指在输入特征图的一个局部窗口内选择最大值最为该窗口的输出,这里一个窗口内的数据的顺序对最后的输出结果并不会产生影响,所以根据对称函数定义可以将最大池化层看做一个对称函数;
2.一个局部和全局信息组合结构;这一块主要应对分割时,需要结合局部和整体特征进行,在分割网络中将局部特征和全局特征连接在一起;
3.以及两个对齐输入点和点特征的联合对齐网络。针对刚性变换不变性,设计了T-Net网络来预测一个仿射变换矩阵;















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









