







UWB室内定位
课程名称:室内定位技术
姓 名:阚昊宇
目录
UWB室内定位
一 实验场地及设备介绍
本实验在测绘学院302室进行,在室内空旷地区选择一块矩形区域作为实验场地,长3.6 m,宽3 m。以宽为x轴,长为y轴建立平面坐标系,场地除一处小型障碍物外通视良好,具体选点和障碍物尺寸见下章。实验设备无论参考点、待测点均采用同一型号UWB测距设备Time Domain PulsON 400(P400)系列,采集软件为Time Domain的P400 RCM/RangeNet Software,其中RCM版本为2.8,RangeNet版本为1.3。
二 数据采集实验过程
参考点、待测点如图 1 实验场地及参考点、待测点示意图选择,其中参考点使用4台设备布设于作为响应节点(参考点,Reference Point),使用1台设备在5个待测点(Observation Point)上与参考点进行距离测量,坐标以天线位置为准。在每个待测点对每个参考点发起测距1000次,得到原始数据。在采集完参考点之后,进行待测点(Observation Point)的信号采集,采集标准及处理方法同参考点。
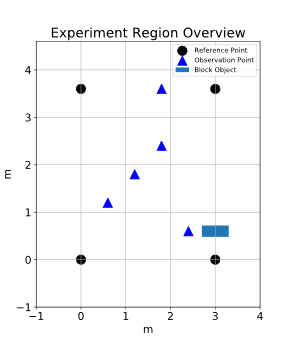
图 1 实验场地及参考点、待测点示意图
统计原始数据的测距成功次数、成功率、平均值、标准差、信噪比平均值、信噪比标准差,得到预处理数据如表 1 采集设备预处理后的部分数据展示。所有预处理之后的数据见UBWDATA.txt。
表 1 采集设备预处理后的部分数据展示
| 观测点1-参考点104 | 测量次数 | 915 / 1000 |
| 测量成功率 | 91.5% | |
| 平均距离 | 2738.4 mm | |
| 样本标准差 | 15.2 mm | |
| 平均信噪比 | 43.9 dB | |
| 信噪比标准差 | 2.2 dB | |
| 观测点1-参考点105 | 测量次数 | 967 / 1000 |
| 测量成功率 | 96.7% | |
| 平均距离 | 2520.7 mm | |
| 样本标准差 | 6.7 mm | |
| 平均信噪比 | 44.2 dB | |
| 信噪比标准差 | 1.1 dB | |
| ··· | ··· | ··· |
三 数据处理算法介绍及处理过程
通过平面距离交汇计算待测点位置,由于在相对位置已知的条件下每个待测点的位置只需要两个参考点的测距就可以解算得到,但目前每个参考点有4条测距信息,故采用平差方式得到待测点位置:
设一个待测点第i次真实距离为d_i,则观测方程
|
|
| (1) |

其中,x,y为是未知的待测点坐标,x_{ri},y_{ri}为已知的第i个参考点的坐标。
(1)式线性化,得到
|
|
| (2) |
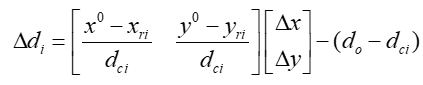
其中x^0,y^0为待测点近似坐标,\delta_x,\delta_y为待测点坐标改正数,d_o为观测距离, 。
。
由(2)式根据间接平差得到
|
|
| (3) |
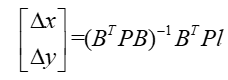
其中
 ,
,
P可取单位阵或按观测值标准差或按信噪比定权, 。多次迭代得到待测点坐标。
。多次迭代得到待测点坐标。
四 数据处理结果及精度分析
(一)不剔除粗差,用测距数据的标准差的倒数定权
在利用所有接收成功的测距数据的平均值解算,利用测距数据的标准差的倒数定权,对5个待测点进行估计,得到结果如下表 2 方法一结果及精度。
表 2 方法一结果及精度
| 待测点 | 1 | 2 | 3 | 4 | 5 | |||||
| 坐标真值/m | 0.60 | 1.20 | 1.20 | 1.80 | 1.80 | 3.60 | 2.40 | 0.60 | 1.80 | 2.40 |
| 估计位置/m | 0.536 | 1.150 | 1.189 | 1.792 | 1.842 | 3.592 | 2.300 | 0.475 | 1.814 | 2.371 |
| 坐标误差/m | 0.063 | 0.050 | 0.011 | 0.008 | -0.042 | 0.008 | 0.100 | 0.124 | -0.014 | 0.028 |
| 内符合精度(sigma)/m | 0.098 | 0.240 | 0.098 | 0.103 | 0.164 | |||||
| 外符合精度(RMS)/m | 0.083 | |||||||||
(二)剔除粗差,用测距数据的标准差的倒数定权
观察数据注意到,当待测点和参考点距离较大、接收机成功测距次数较少时,测距精度迅速下降,例如在本次实验中,剔除粗差后:
- 当对某参考点测距成功率为91.7%时,观测标准差为7.4 mm;
- 当对某参考点测距成功率为84.4%时,观测标准差为25.5 mm;
- 当对某参考点测距成功率为33.4%时,观测标准差为319.2 mm;
故考虑数据利用测距数据的标准差的倒数定权,得到结果如表 3 方法二结果及精度。
表 3 方法二结果及精度
| 待测点 | 1 | 2 | 3 | 4 | 5 | |||||
| 坐标真值/m | 0.60 | 1.20 | 1.20 | 1.80 | 1.80 | 3.60 | 2.40 | 0.60 | 1.80 | 2.40 |
| 估计位置/m | 0.529 | 1.150 | 1.180 | 1.786 | 1.837 | 3.599 | 2.351 | 0.514 | 1.813 | 2.370 |
| 坐标误差/m | 0.071 | 0.050 | 0.020 | 0.014 | -0.037 | 0.001 | 0.049 | 0.086 | -0.012 | 0.030 |
| 内符合精度(sigma)/m | 0.059 | 0.252 | 0.181 | 0.155 | 0.170 | |||||
| 外符合精度(RMS)/m | 0.063 | |||||||||
(三)剔除粗差,利用信噪比赋权
信噪比(英语:Signal-to-noise ratio,缩写为SNR或S/N),是科学和工程中所用的一种度量,用于比较所需信号的强度与背景噪声的强度。其定义为信号功率与噪声功率的比率,以分贝(dB)为单位表示。
例如在本次实验中,剔除粗差后:
- 当对某参考点测距成功率为91.7%时,平均信噪比为38.6 dB
- 当对某参考点测距成功率为86.8%时,平均信噪比为22.4 dB;
- 当对某参考点测距成功率为36.9%时,平均信噪比为21.8 dB
根据320-0320B RCM - RangeNet RET User Guide.pdf的Appendix E: Noise, Signal, and SNR一节,得到
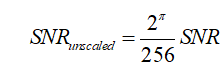
故考虑利用测距数据的Unscaled处理后的信噪比定权,得到结果如表 4方法三结果及精度,其中内符合精度无意义,故在表中舍去。
表 4 方法三结果及精度
| 待测点 | 1 | 2 | 3 | 4 | 5 | |||||
| 坐标真值/m | 0.60 | 1.20 | 1.20 | 1.80 | 1.80 | 3.60 | 2.40 | 0.60 | 1.80 | 2.40 |
| 估计位置/m | 0.616 | 1.210 | 1.167 | 1.788 | 1.787 | 3.707 | 2.387 | 0.534 | 1.788 | 2.386 |
| 坐标误差/m | -0.016 | -0.010 | 0.033 | 0.012 | 0.013 | -0.107 | 0.013 | 0.066 | 0.012 | 0.014 |
| 外符合精度(RMS)/m | 0.060 | |||||||||
五 小结
在小区域室内定位场景且其他条件相同的情况下,三种不同定权方式对最终定位结果影响较大,见图 2 不同定权和处理方法精度柱形图。
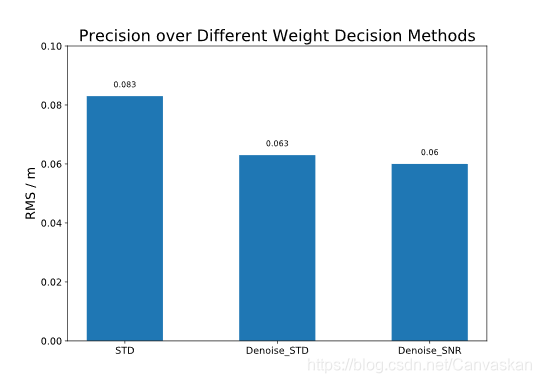
图 2 不同定权和处理方法精度柱形图
本次实验熟悉了UWB室内定位从室内数据采集到建立数据库到事后定位的一系列操作流程,编程实现2D平面的平差定位算法。经过粗差剔除和信噪比赋权后,算法定位精度在cm级,满足小区域内较高精度室内定位要求。
参考文献
[1] Pail D.Grove 著, 练军想 等 译. GNSS与惯性及多传感器组合导航系统原理(第二版)[M]. 北京: 国防工业出版社, 2015.3.

















 1690
1690

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









