







 本文详细介绍了几何光学中的望远镜、显微镜和照相物镜系统的理想光学性质。望远系统包括伽利略望远镜和开普勒望远镜,其特点为物方和像方焦距无限大,垂轴放大率和轴向放大率与物距无关。显微镜系统由短焦距物镜和目镜组成,成倒立像,垂轴放大率为负。照相物镜则在无限远成像时放大率为0。此外,还讨论了矩阵运算在几何光学中的应用,如近轴光的矩阵表示、物像矩阵等,用于描述光线在光学系统中的传播变化。
本文详细介绍了几何光学中的望远镜、显微镜和照相物镜系统的理想光学性质。望远系统包括伽利略望远镜和开普勒望远镜,其特点为物方和像方焦距无限大,垂轴放大率和轴向放大率与物距无关。显微镜系统由短焦距物镜和目镜组成,成倒立像,垂轴放大率为负。照相物镜则在无限远成像时放大率为0。此外,还讨论了矩阵运算在几何光学中的应用,如近轴光的矩阵表示、物像矩阵等,用于描述光线在光学系统中的传播变化。
几何光学学习笔记(12)- 3.9几种典型系统的理想光学系统性质& 3.10 矩阵运算在几何光学中的应用
3.9几种典型系统的理想光学系统性质
1.望远镜系统
平行于光轴入射到光学系统中的光线,因系统结构不同,其共辄光线可以和光轴相交,也可以平行于光轴。前一种为有限焦距系统,后一种为望远系统(无焦系统)。望远系统是光组组合的重要情况之一,它由两个光组组合而成,其重要特点是光学间隔为零。由于其光学间隔为零,所以有许多奇妙的特点。
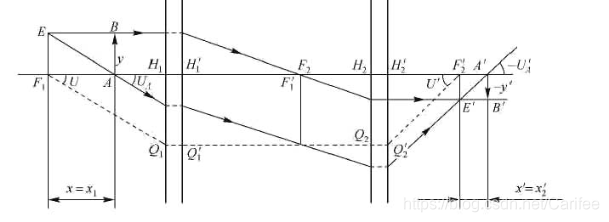 其物方焦距和像方焦距为无限大。即平行光射入平行光射出,主点位置和焦点位置均在无限远处。望远系统的焦距为无限大,但放大率为有限值,且不因物体位置而异。
其物方焦距和像方焦距为无限大。即平行光射入平行光射出,主点位置和焦点位置均在无限远处。望远系统的焦距为无限大,但放大率为有限值,且不因物体位置而异。
系统总长为 f 1 ′ − f 2 f'_{1}-f_{2} f1′−f2
系统的物像公式:
x
2
′
=
f
2
f
2
′
f
1
f
1
′
x
1
x'_{2}={{f_{2}f'_{2}}\over {f_{1}f'_{1}}}x_{1}
x2′=f1f1′f2f2′x1
垂轴放大率:
b
=
b
1
b
2
=
f
2
′
f
1
′
b=b_{1}b_{2}={{f'_{2}}\over {f'_{1}}}
b=b1b2=f1′f2′
轴向放大率:
a
=
f
2
f
2
′
f
1
f
1
′
a={{f_{2}f'_{2}}\over {f_{1}f'_{1}}}
a=f1f1′f2f2′
角放大率:
g
=
t
a
n
U
′
t
a
n
U
=
f
1
f
2
′
g={{tanU'}\over {tan U}}={{f_{1}}\over {f'_{2}}}
g=tanUtanU′=f2′f1
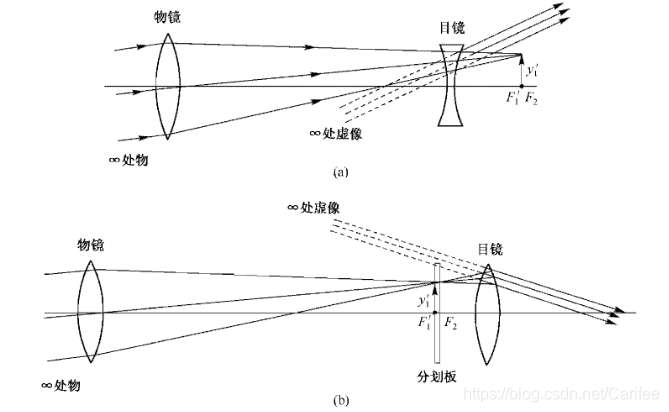
由此可见,一般光学系统中的各放大率之间的关系在望远系统中同样成立。望远系统有两种最基本形式,一种称为伽利略望远镜革统,用正透镜作为物镜,以负透镜作为目镜,其产生正立虚像,系统中没有实像,不能装瞄准用卦划板 ; 另一种称为开普勒望远镜系统,物镜和目镜均为正透镜,其产生倒立虚像,由于有中间实像,可以安装瞄准用分划板。
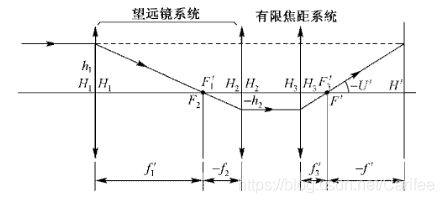
 一个望远系统与一望远系统组合,仍为望远系统。望远系统加一个有限焦距的系统,组合成为一个有限焦距系统,其像焦点就是所加系统的像方焦点,易于证明 h2/ h1, 为望远镜的垂轴倍率倒数1/b1。在一个有限焦距的光学系统之前加一个角放大率为 g 的望远系统时,整个系统的焦距为原有限焦距系统的焦距的g倍。
一个望远系统与一望远系统组合,仍为望远系统。望远系统加一个有限焦距的系统,组合成为一个有限焦距系统,其像焦点就是所加系统的像方焦点,易于证明 h2/ h1, 为望远镜的垂轴倍率倒数1/b1。在一个有限焦距的光学系统之前加一个角放大率为 g 的望远系统时,整个系统的焦距为原有限焦距系统的焦距的g倍。
2.显微镜系统
显微镜系统由焦距很短的物镜和目镜组成,在物镜后焦F’1到目镜前焦点F之间有着较大的光学间隔 D。
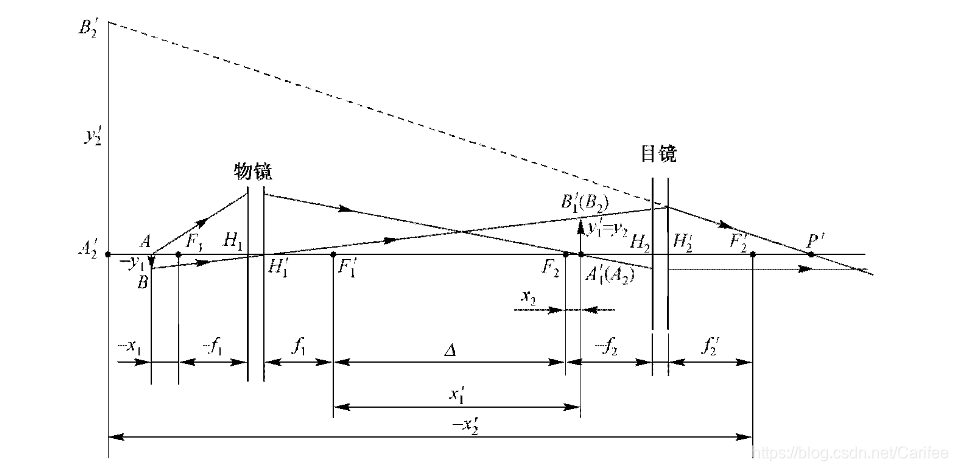 f
′
=
−
f
1
′
f
2
′
D
,
f
′
=
f
1
f
2
D
f'=-{{f'_{1}f'_{2}}\over {D}},f'={f_{1}f_{2}\over {D}}
f′=−Df1′f2′,f′=Df1f2
f
′
=
−
f
1
′
f
2
′
D
,
f
′
=
f
1
f
2
D
f'=-{{f'_{1}f'_{2}}\over {D}},f'={f_{1}f_{2}\over {D}}
f′=−Df1′f2′,f′=Df1f2
像方焦距f’为负,物方焦距f为正。
垂轴放大率
b
=
x
1
′
x
2
′
f
1
′
f
2
′
b={{x'_{1}x'_{2}}\over {f'_{1}f'_{2}}}
b=f1′f2′x1′x2′
b为负值,显微镜系统成倒像。
轴向放大率
a
=
x
1
′
x
2
′
f
1
′
f
2
′
a={{x'_{1}x'_{2}}\over {f'_{1}f'_{2}}}
a=f1′f2′x1′x2′
角放大率
g
=
f
1
′
f
2
′
x
1
′
x
2
′
g={{f'_{1}f'_{2}}\over{x'_{1}x'_{2}}}
g=x1′x2′f1′f2′
3.照相物镜系统
照相物镜一脚才无限远成像,此时垂轴放大率、轴向放大率和角放大率分别:b=0,a=0,g=∞。实际照相物镜是在有限距离应用,随物距的改变,像平面相对于物镜的距离也改变,一般移动物镜,在规定像平面上成清晰像,即所谓调焦。
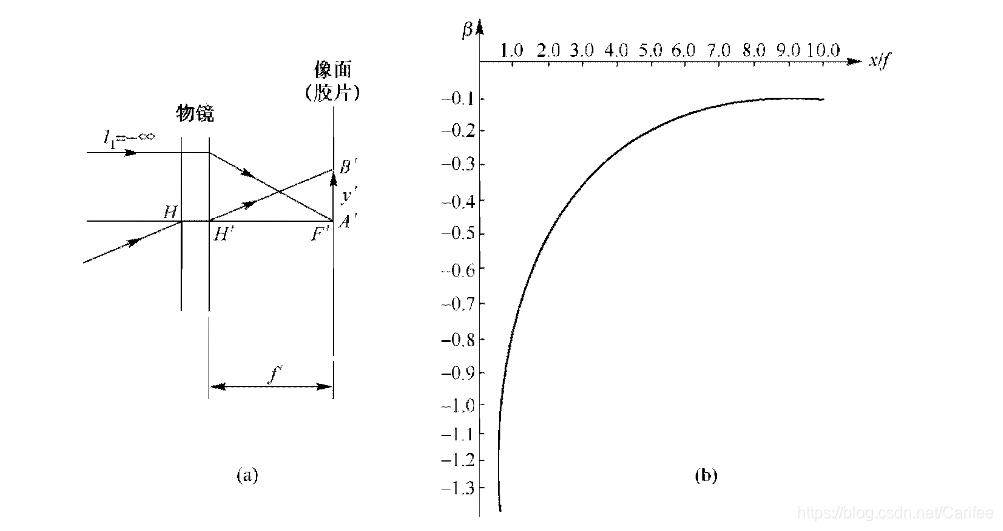
由曲线可以看出:
其一,由于牛顿放大率公式 b=-f/x , 且照相时必须成实像在胶片上,所以永远成倒像。随着物距
的减小,即 x/f 的减小, b 增大。在x=f处为 b= -1 的倒立实像。其二,当物距一定时,照相物镜
更换为长焦距时,其垂轴放大率 b 也增大。
3.10 矩阵运算在几何光学中的应用(了解)
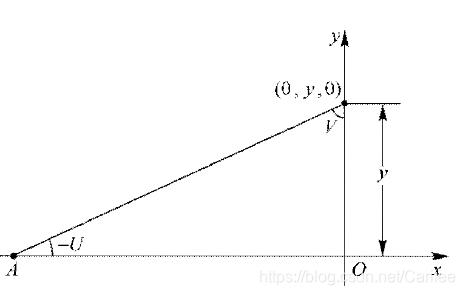
1.近轴光的矩阵表示
在矩阵运算中,确定一条光线的雪间位置用该光线和一己知参考面上交点的坐标(0 , y , z)及该光线的三个方向余弦和所在空间折射率的乘积na,nb和ng来表示(8个还是9个变量?)。对于子午面内的光线,只要用两个参量就可以了,即光线在参考面上的交点高度 y 及该光线和 y 坐标轴夹角的余弦与折射率的乘积 ncosV。
折射矩阵:
参考面可以是折射面的近轴部分,也可以是物、像面或任一指定平面。光线通过参考面之后,其参量发生变化,湖中变化可以用一个矩阵来描述。例如光线经过一个折射面,其方向变化可用折射矩阵来表示。
过渡矩阵:
光线由一个参考面射向另一个参考面,光线在后一个参考面上的坐标发生变化,可用一个过渡矩
阵来表示。
传递矩阵:
光线经过光学系统可用一系列的折射矩阵和过渡矩阵的乘积来表示,该乘积即为传递矩阵。
2.物像矩阵
光学系统对物体成像是把光线在物面处的坐标变换为像面处的坐标。这个变换由一个物像矩阵来
完成。


















 1477
1477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











