







1 场景定义
车辆( 具备L1及以上的驾驶自动化系统) 在道路中行驶,当道路中存在遮挡场景(如“鬼探头” )时,车辆不能及时识别有潜在危险的目标物(如车辆、行人)。通过路侧设备C-V2X RSU或者车端设备C-V2X OBU,可以提前获知目标物的位置和姿态。车端C-V2X协同应用系统中将摄像头、雷达等单车感知数据与C-V2X数据进行融合,当检测到本车与目标物存在碰撞风险时,车端C-V2X协同应用系统通过HMI消息提醒人类驾驶员,并在必要时发出控车信号(刹车或降低车速)从而避免碰撞或减轻碰撞程度。
2 适用范围
该场景适用于城市、郊区、封闭园区等的普通道路及高速公路等区域。
3 场景功能点
C-AEB在传统AEB单车感知的基础上引入C-V2X技术。 通过C-V2X直连通信,车辆能够提前感知超视距的目标对象( 如其他车辆或行人), 并将这些数据与车辆本车的传感器数据进行融合决策, 及时给出安全提醒或控车信号,避免因视域受限导致的行车安全性问题,同时提升行车舒适性。
具体实施规则如下:
1) 本车的车端C-V2X协同应用系统融合本车摄像头/雷达及C-V2X设备感知到的周围目标物,根据目标物信息计算得出碰撞危险程度;
2) 碰撞危险程度达到临界预警点表明本车与目标物存在碰撞可能,车端C-V2X协同应用系统会触发“前方有危险目标物” 预警;
3) 若人类驾驶员获得预警信息后未采取制动,车端C-V2X协同应用系统会输出控车信号进行部分制动
4) 若碰撞危险程度达到制动临界点,车端C-V2X协同应用系统会输出控
车信号进行制动缓解碰撞。
4 基本性能要求
1)C-V2X OBU播发BSM消息频率为10 Hz, 信息传输平均时延在30 ms以内,传输距离≥150 m;
2) 路侧设备感知的目标信息位置精度0.5 m,车辆速度精度1.8 km/h,非机动车速度精度1.8 km/h;
3) 车端设备感知的目标信息位置精度0.1 m,速度精度2 km/h, 加速度0.1m/s2;
4) C-V2X RSU播发RSM消息频率为10 Hz, MAP消息频率≥1 Hz, 信息传输平均时延在30 ms以内,传输距离≥150 m;
5) 本车定位信息采集频率≥10 Hz, 偏差1.5 m之内占比95%以上;
6) 满足车车、车路传输安全要求。
5 数据输入/输出
1) 数据输入: 本车摄像头信号(车道信息、交通参与者信息)、雷达信号(车辆和行人的位置和姿态), C-V2X有效数据(目标车辆、行人), 高精度地图信息(可选),本车的车辆位置信息、 姿态信息和
车辆异常信息等
2) 数据输出: “前方有危险目标物” 预警,控车信号。
6 功能模块设计
场景功能模块C-AEB场景的功能模块如图所示。中:
✓ 输入系统:包括MEC、 C-V2X RSU、 C-V2X OBU, 本车的传感器(摄像头、雷达)、组合定位系统以及底盘/车身系统,用橙色模块
标识;
✓ 车端C-V2X协同应用系统:包括C-V2X数据处理、融合感知和决策,用绿色模块标识;
✓ 输出系统: 包括HMI和底盘/车身系统,用黄色模块标识。
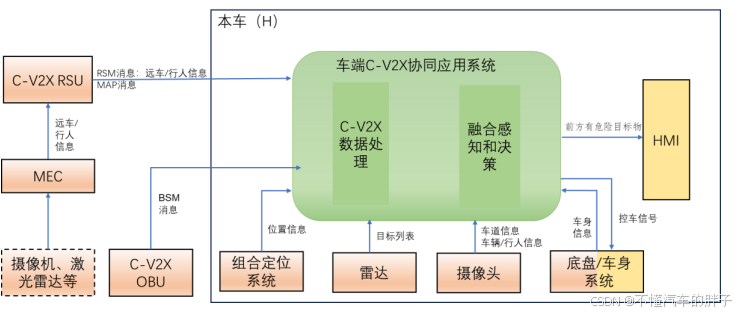
图 C-AEB场景的功能模块图
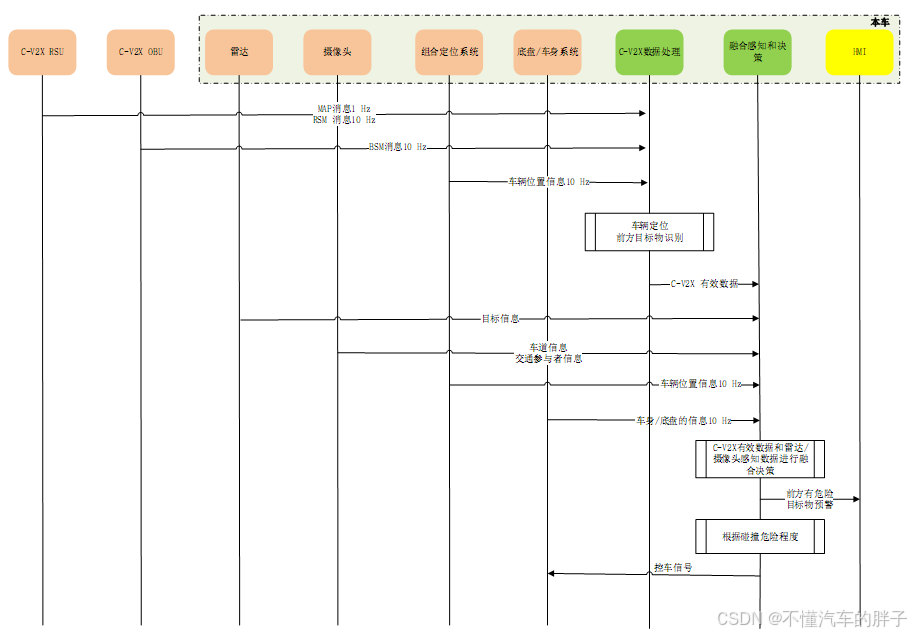
2) 系统间信息流程图
C-AEB场景的系统间信息交互流程如图所示,主要描述不同系统间的信息交互内容,以及车端C-V2X协同应用系统的处理流程。
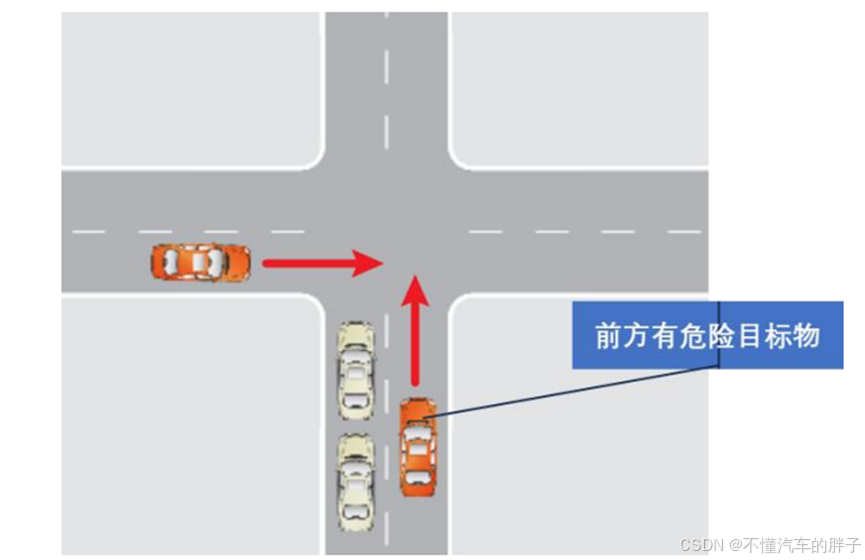
3) 场景功能效果图
本车行驶穿过十字路口,左侧车道有两辆车遮挡住本车视野,依靠人类驾驶员视觉、车端摄像头、雷达等单车感知未有效识别左侧横穿被遮挡车辆。 本车通过C-V2X消息可获取左侧横穿车辆的实时位置和姿态,车端C-V2X协同应用系统计算出碰撞风险,发出“ 前方有危险目标物” 预警,并在必要时采取紧急制动。具体功能效果如图所示。
引用:陈山枝等,《车路云一体化系统C-V2X车车/车路协同典型应用场景及实施参考》,移动通信及车联网国家工程研究中心等, 2024年10月。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











