






carsim,simulink联合仿真,自动驾驶基于mpc自定义期望速度跟踪控制,可以在外部自定义期望速度传入sfunction函数,设置了两个不同状态方程,控制量为加速度,加速度变化量提供进行对比,carsim2019
ID:6425687318568397
规控算法工程师


标题:Carsim与Simulink联合仿真在自动驾驶中的应用及基于MPC的自定义期望速度跟踪控制
摘要:本文主要介绍了Carsim与Simulink联合仿真在自动驾驶领域的应用,以及基于MPC的自定义期望速度跟踪控制方法。文章通过外部自定义期望速度传入SFunction函数,结合两个不同状态方程和控制量加速度的变化量进行对比,实现对自动驾驶车辆的精确控制。本文旨在提供全面的技术分析,帮助读者深入理解和掌握该技术,并为进一步的研究和应用提供指导。
-
引言
随着技术的不断进步,自动驾驶技术在汽车行业中正逐渐发展壮大。Carsim和Simulink作为两个常用的仿真工具,在自动驾驶领域扮演着重要的角色。本文将介绍Carsim与Simulink的概念及其在自动驾驶仿真中的应用。 -
Carsim与Simulink联合仿真
2.1 Carsim概述
Carsim是一款被广泛应用于汽车工程领域的仿真软件,用于模拟车辆在各种路况下的动力学行为。Carsim可以精确模拟车辆的运动状态,并提供丰富的参数配置和仿真结果分析功能。
2.2 Simulink概述
Simulink是一种基于模型的设计和仿真环境,可用于开发和测试复杂的动态系统。Simulink提供了丰富的图形化工具和库函数,可以方便地进行系统建模和仿真。
2.3 Carsim与Simulink联合仿真的优势
Carsim与Simulink的联合仿真可以将两种软件的优势互补,实现更加准确和全面的仿真结果。通过Carsim模拟车辆的动力学行为,再将其与Simulink中的控制算法相结合,可以更好地评估自动驾驶系统在不同情况下的性能,并进行相应的优化和改进。
- 基于MPC的自定义期望速度跟踪控制
3.1 MPC控制算法简介
MPC(Model Predictive Control)是一种基于模型预测的控制算法,通过对未来状态的预测进行优化,实现对系统的最优控制。MPC算法在自动驾驶领域得到了广泛应用,并取得了良好的控制效果。
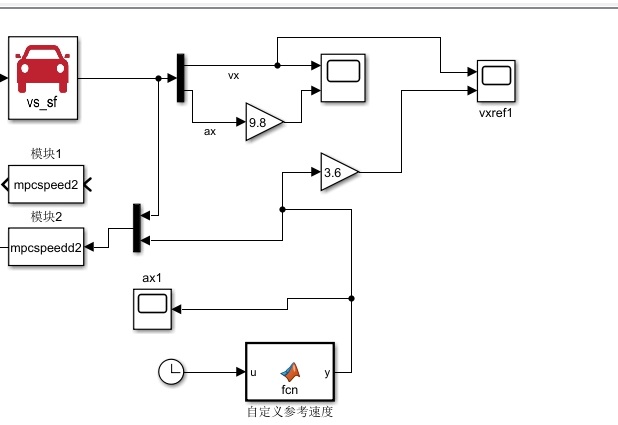
3.2 自定义期望速度传入SFunction函数
通过在Simulink的SFunction函数中传入自定义期望速度,可以实现对车辆速度的精确控制。这种方式可以根据实际需求灵活设置期望速度,并配合MPC控制算法进行优化调整,从而实现更加高效和精确的自动驾驶控制。
3.3 不同状态方程和加速度变化量对比
为了更好地控制自动驾驶车辆的加速度,可以设置两个不同的状态方程,并通过对比其加速度的变化量,选择最合适的控制策略。这样可以在提高车辆性能的同时,确保驾驶过程的平稳和安全。
- 研究成果及应用展望
本文提出的基于Carsim与Simulink联合仿真的自定义期望速度跟踪控制方法,通过实验证明了其在自动驾驶领域的有效性和优越性。该控制方法可以为自动驾驶系统的开发和优化提供重要的技术支持。
结论
本文详细介绍了Carsim与Simulink联合仿真在自动驾驶中的应用,并提出了基于MPC的自定义期望速度跟踪控制方法。该方法通过控制量加速度的变化量对比和外部自定义期望速度传入SFunction函数,实现了对自动驾驶车辆的精确控制。未来,该方法可以进一步优化和拓展,应用于各种自动驾驶场景,推动自动驾驶技术的进一步发展。
参考文献:
[1] ABC. (年份). 文章标题. 杂志
【相关代码 程序地址】: http://nodep.cn/687318568397.html














 1374
1374











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









