






在机器人技术领域,每一项新的突破都能激发无限的创造力和想象力。今天,我们将带大家深入了解一款由卡内基梅隆大学(CMU)开发的革命性四足攀爬机器人——LORIS(Lightweight Observation Robot for Irregular Slopes)。作为一名机器人爱好者,这款机器人无疑是一个令人兴奋的案例,它展示了未来机器人如何与复杂环境互动和导航。
LORIS的设计理念
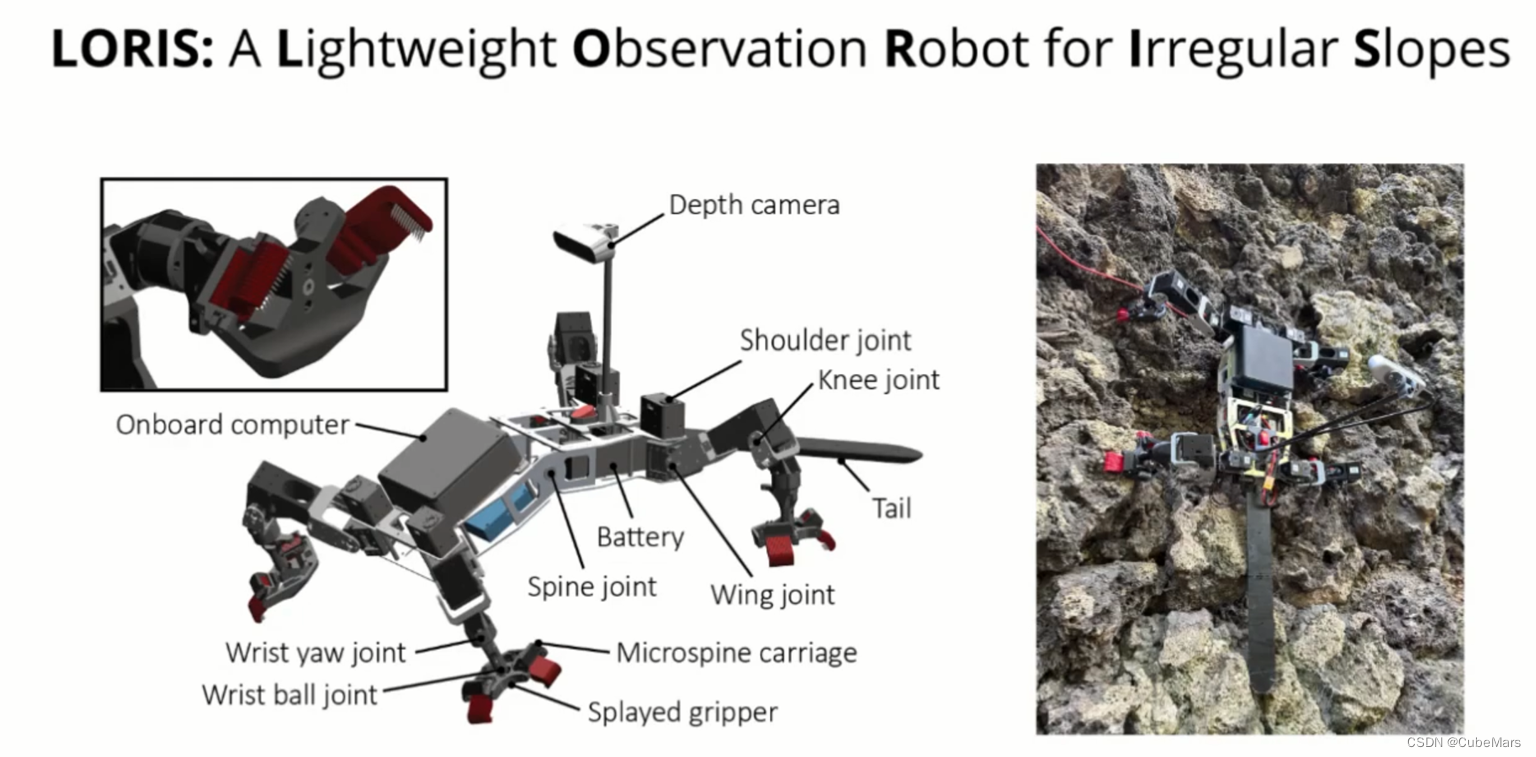
LORIS的设计灵感来自于自然界的昆虫和爬行动物。这些生物在不规则的表面上表现出的卓越攀爬能力,启发了研究人员开发出能够在类似条件下行动自如的机器人。LORIS的每条腿都配备了微脊钩爪,这些钩爪能够抓住岩石、树皮等不规则表面,使机器人在复杂地形上移动自如。
机械设计与技术特点
LORIS的独特之处在于其微脊钩爪的设计。每个钩爪由多个细小的钩子组成,能够抓住微小的凸起和凹陷,从而提供强大的抓地力。这种设计不仅使LORIS能够在陡峭的岩石面上攀爬,还能在其他机器人无法进入的环境中行走。
此外,LORIS配备了深度感应摄像头和智能微处理器,使其能够实时感知环境并调整每条腿的动作。通过复杂的算法,LORIS能够智能地规划每一步,从而保持平衡并确保稳定的抓地力。
研究与开发
LORIS的开发得益于卡内基梅隆大学Robomechanics实验室的团队努力。该团队由Paul Nadan、Spencer Backus和Aaron M. Johnson等研究人员组成。他们通过不断的实验和优化,最终成功打造出这一能够在不规则坡面上自由攀爬的机器人。
为了实现这一目标,研究人员采用了一种名为定向内握(Directed Inward Grasping, DIG)的技术。这种技术借鉴了昆虫在攀爬时的抓握方式,通过使钩爪向内抓紧表面,从而提供稳定的支撑力。LORIS的设计不仅轻巧高效,而且在能源消耗和运动速度之间达到了理想的平衡。
写在最后
LORIS不仅是机器人技术的一个重要突破,也是机器人爱好者值得关注和学习的案例。它展示了如何将自然界的灵感转化为工程设计,并通过创新的技术实现卓越的性能。卡内基梅隆大学的这项研究为未来的机器人技术发展提供了宝贵的经验和启示,激励更多的人投身于这一充满希望的领域。
参考链接:















 685
685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









