






四旋翼无人机轨迹跟踪MATLAB仿真
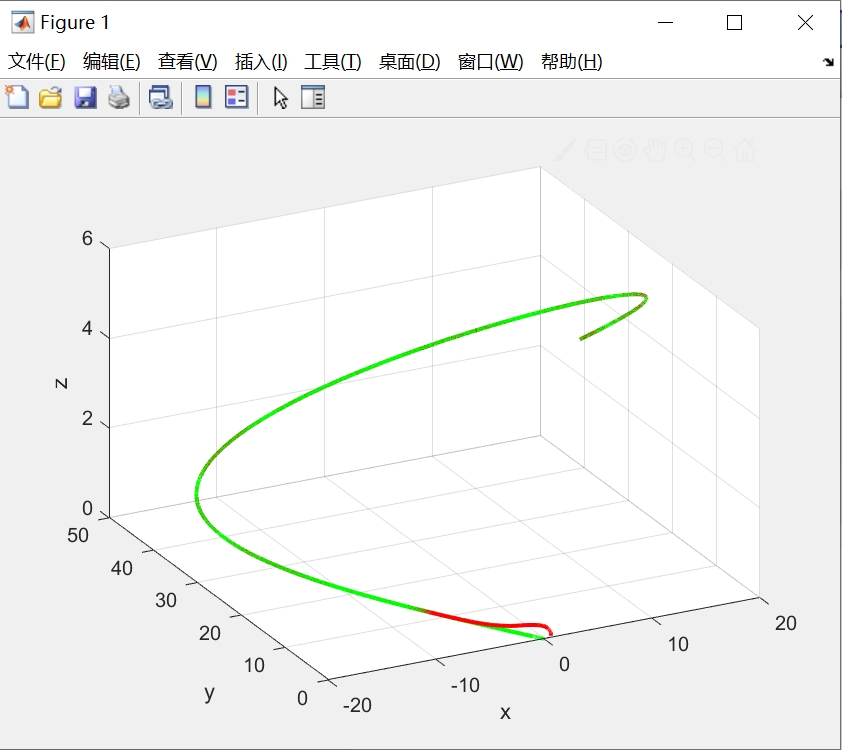
1.无人机跟踪灰机
2.无人机跟踪误差
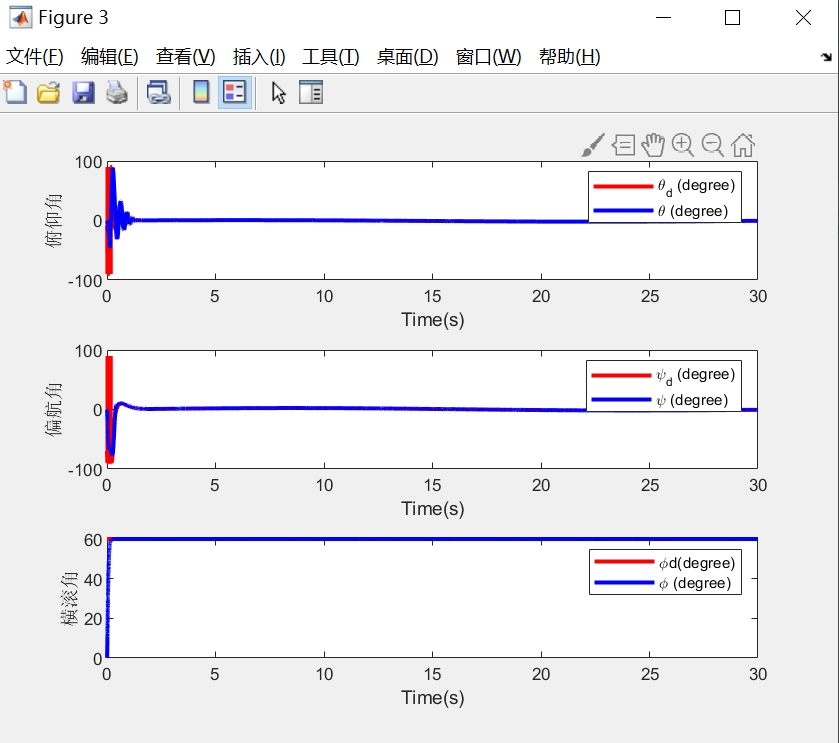
3.无人机姿态角变化
(可以直接运行,不解答)
ID:1460666520550257
五月暖风a

四旋翼无人机技术在近年来的飞速发展中,逐渐成为航空领域的热门研究话题。无人机的轨迹跟踪是其中一个重要的研究方向,它可以实现无人机对目标物体的准确跟踪和控制。本文将以MATLAB仿真为基础,围绕四旋翼无人机轨迹跟踪展开讨论。主要包括无人机跟踪灰机、无人机跟踪误差以及无人机姿态角变化等三个方面。
首先,我们来探讨无人机如何实现对灰机的跟踪。无人机跟踪灰机的关键在于精确的目标检测和跟踪算法。在实际应用中,我们可以利用图像处理技术和计算机视觉算法,通过无人机搭载的摄像头获取灰机的图像信息,并将其转化为数字信号进行处理。然后,通过目标检测算法,无人机可以实时识别出灰机的位置和姿态信息。在跟踪过程中,无人机通过控制飞行器的姿态和位置,保持与灰机的相对位置和角度,从而实现对灰机的精确跟踪。
其次,我们来讨论无人机跟踪误差。无人机跟踪的精度直接影响到其实际应用的效果。在跟踪过程中,由于环境的复杂性和传感器的限制,无人机的跟踪误差是不可避免的。这时候,我们需要合适的控制算法和滤波方法来消除或减小误差。例如,我们可以利用模糊控制算法来提高无人机的控制精度,或者使用卡尔曼滤波算法来估计无人机的位置和速度,从而减小跟踪误差。
最后,我们来讨论无人机姿态角变化。在跟踪过程中,无人机的姿态角是一个重要的参数,它决定了无人机的姿态和飞行方向。通过分析无人机跟踪过程中的姿态角变化,
相关的代码,程序地址如下:http://nodep.cn/666520550257.html
















 1367
1367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









