






ROS学习(一)
`这里主要介绍ROS的安装以及使用
前言
我的运行环境是ubuntu18.04,ROS要安装对应版本的
一、ROS安装
这里主要参考的是此篇博主:
安装ubuntu18.04的ROS
这篇博文里,介绍了2种安装方法。我使用第一种,使用脚本失败了。我使用的是第二种,常规命令行安装,替换文件。
二、使用步骤
1.建立工作空间
建立catkin_ws文件夹(名称随意)
在catkin_ws下建立src文件夹(名称随意)
进入src文件夹
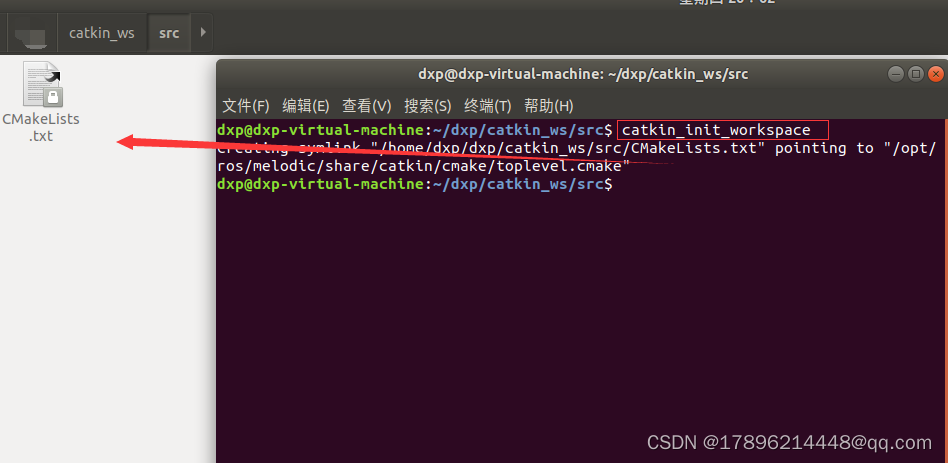
执行
catkin_init_workspace
在src文件夹下生成CmakeLists文件
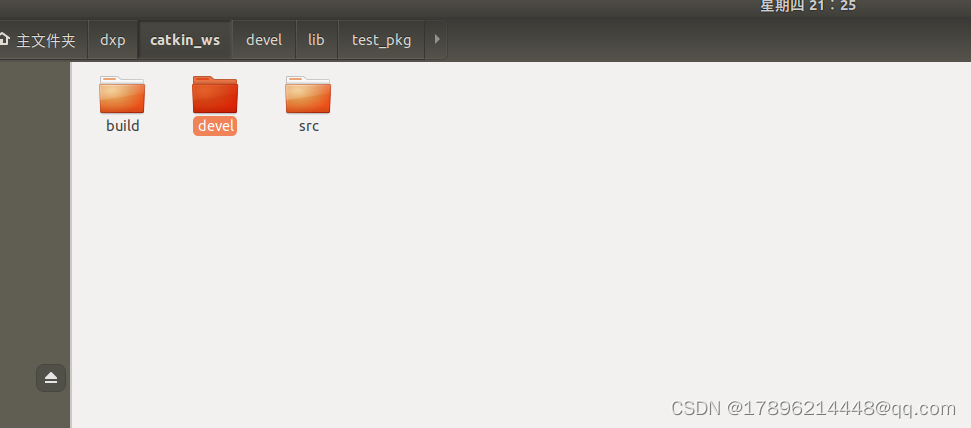
 回到catkin_ws文件夹下
回到catkin_ws文件夹下
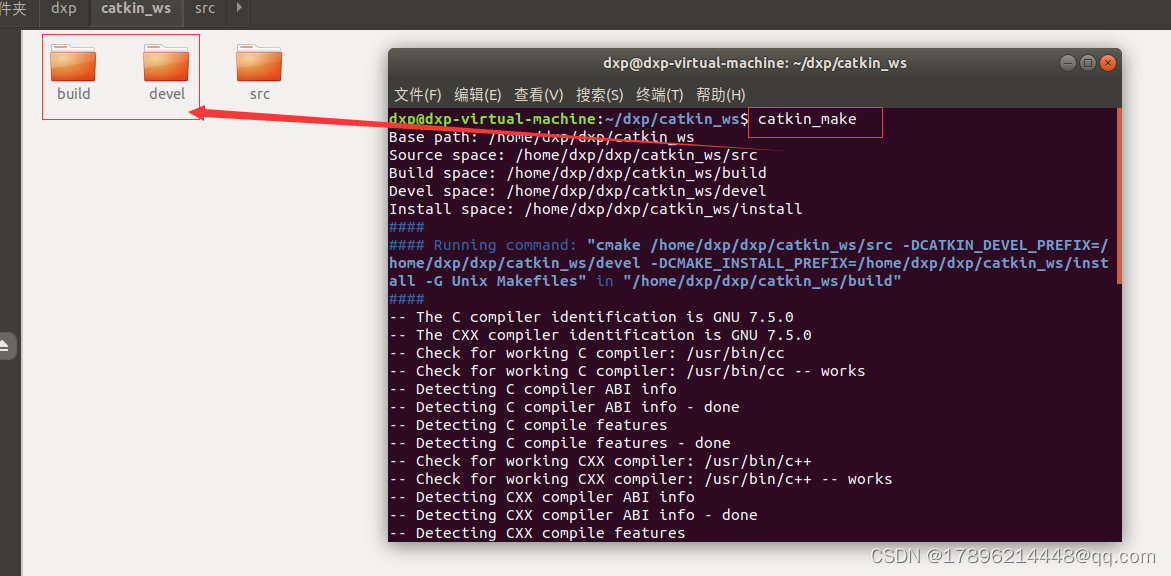
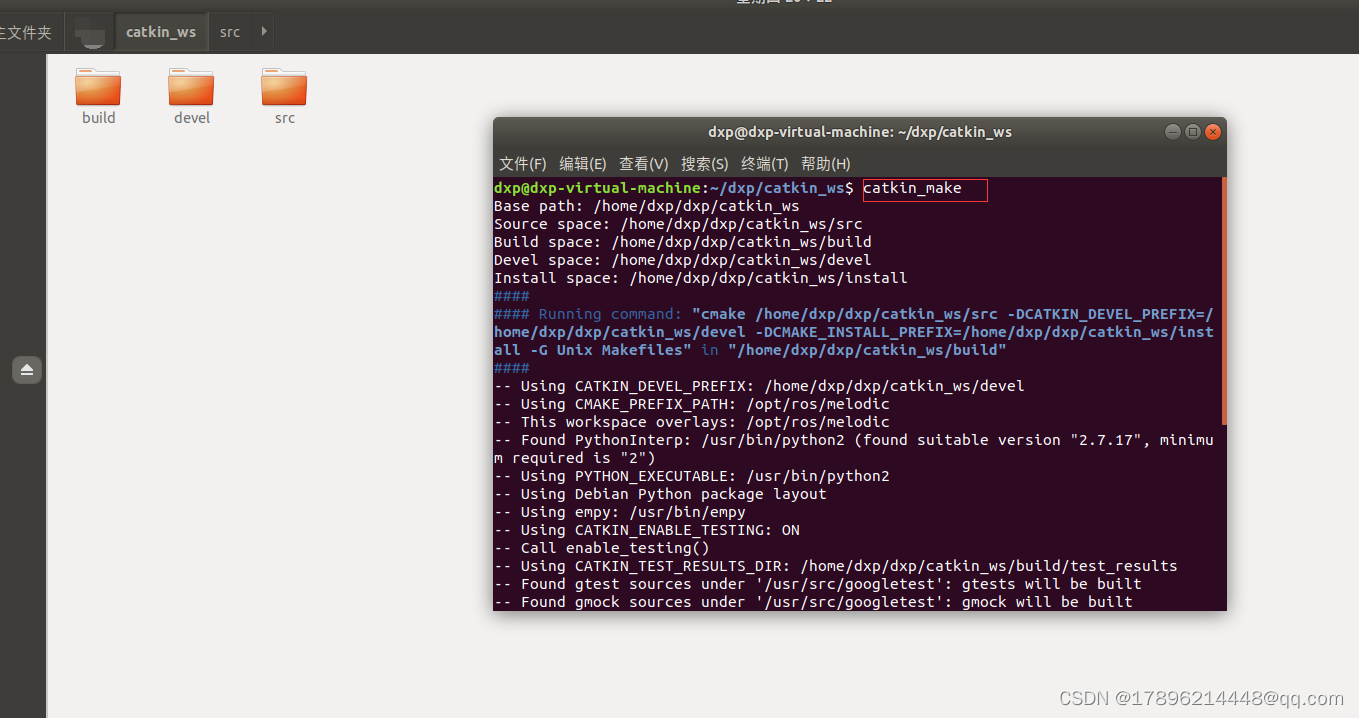
执行
catkin_make
生成如上图所示文件夹
2.创立功能包并运行
在上一节中,建立了最基本的结构,这一节建立功能包
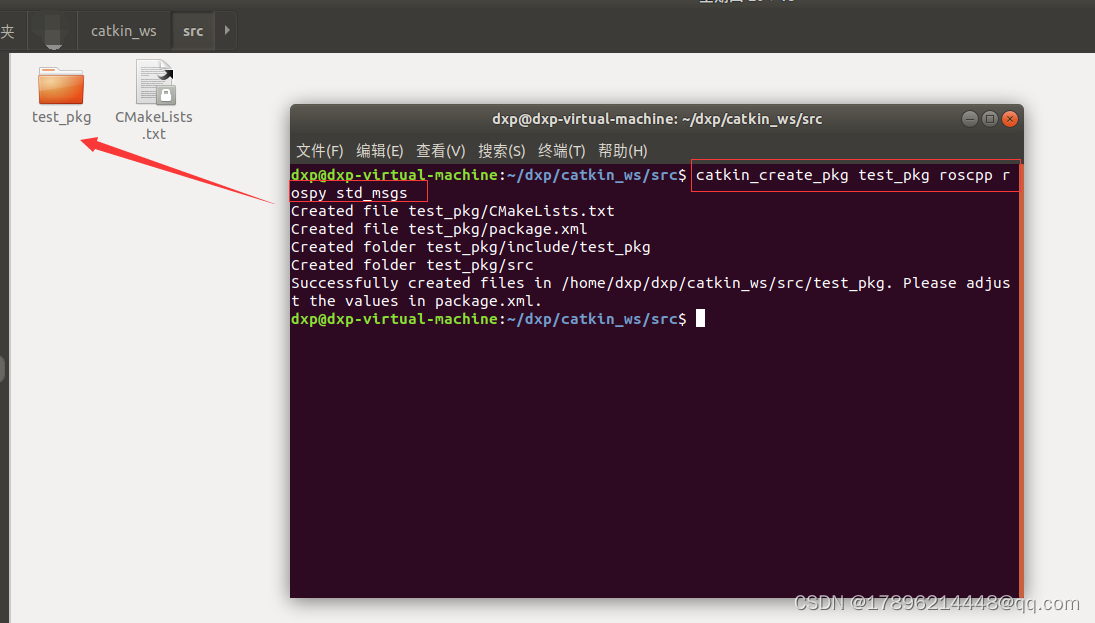
进入src文件夹,输入
catkin_create_pkg test_pkg roscpp rospy std_msgs
生成上图所示文件夹
回到catkin_ws文件夹 执行catkin_make
可以看到对新建立的功能包进行了编译
要想运行生成的可执行文件
三 、测试功能包
在上述建立的功能包下的src文件夹下建立testPkg.cpp
touch testPkg.cpp
修改建立的功能包下的CmakeLists
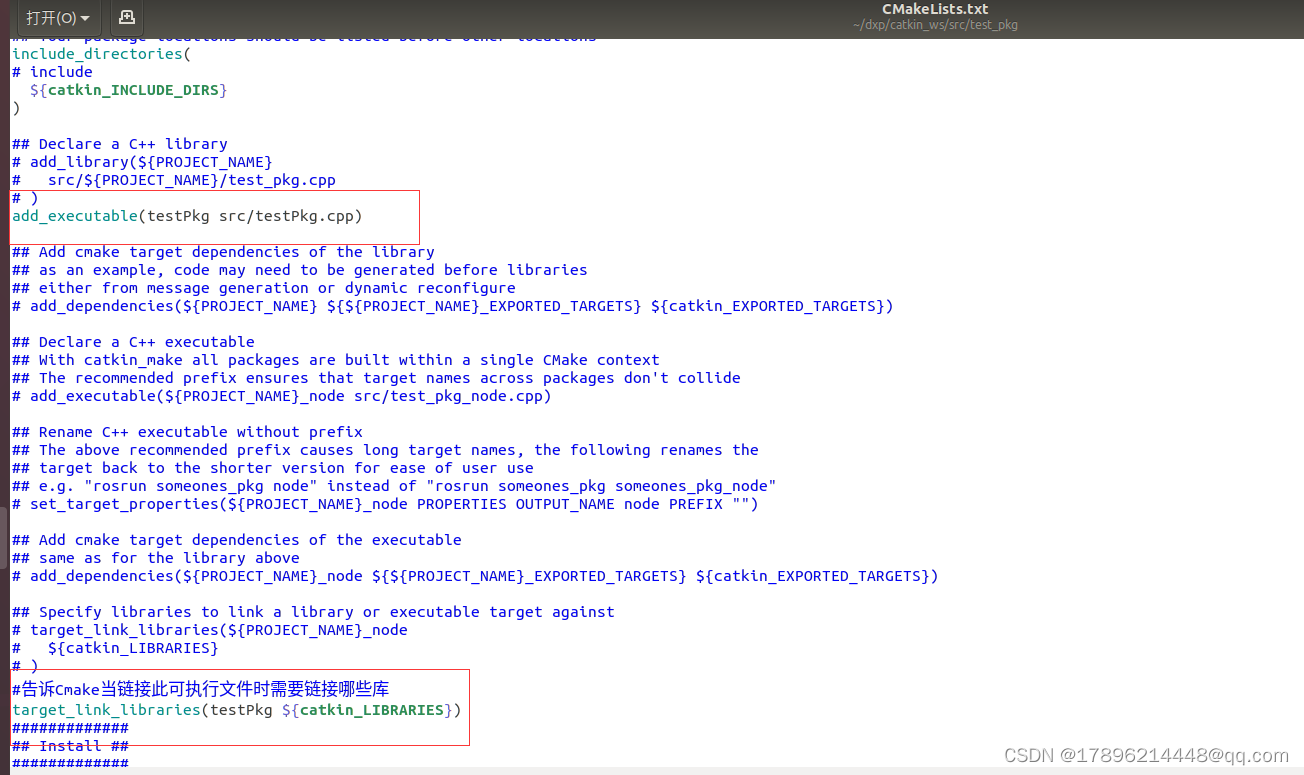
add_executable(testPkg src/testPkg.cpp)
target_link_libraries(testPkg ${catkin_LIBRARIES})
位置不重要
回到catkin_ws文件夹下
执行
catkin_make
编译没有错误的话,会生成可执行文件
在当前路径下打开终端
输入
./testPkg
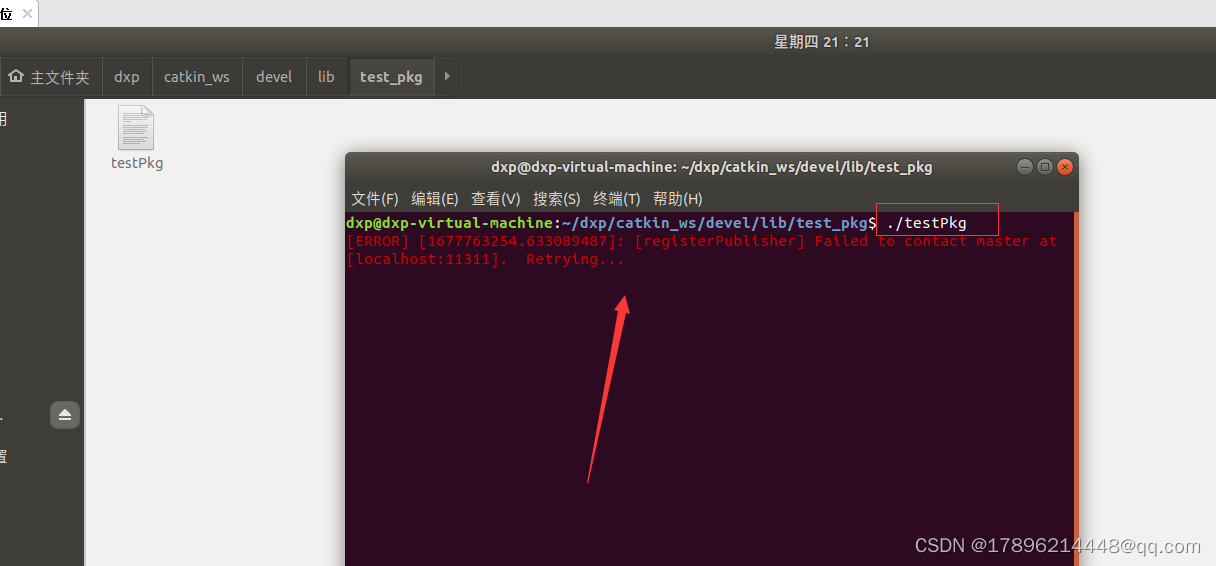
出现上图中的错误,Failed to contact master at
这是没有启动ros的主节点,打开一个新的终端
运行
roscore
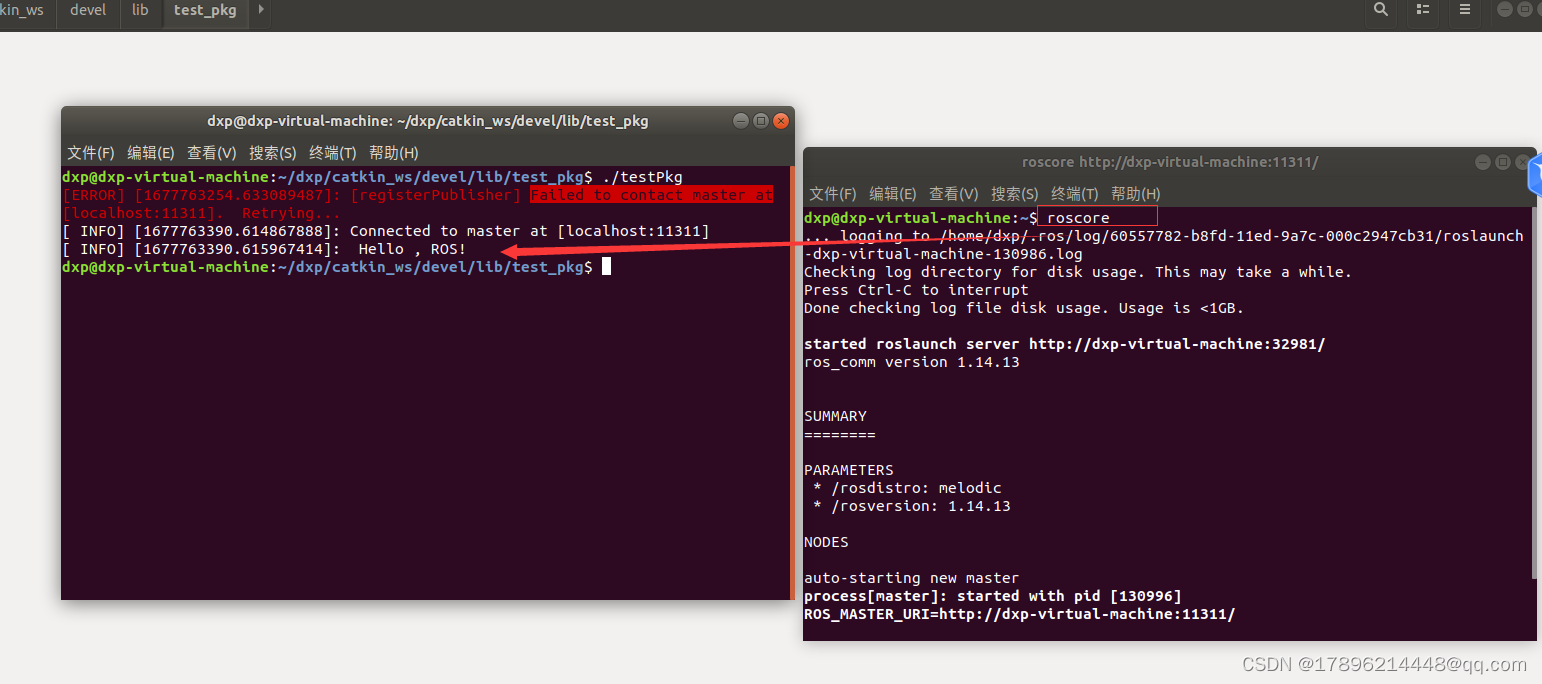
在另外终端输出结果
四 、工作环境变量的作用
回到这个路径
执行
rosrun test_pkg testPkg
会出现未找到包的情况
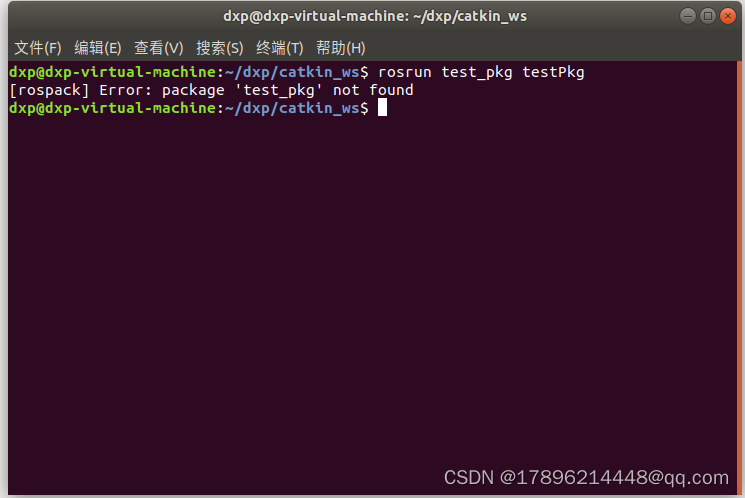
原因是没有 将当前工作空间加入环境变量
一种方法是 在终端里 source 一下
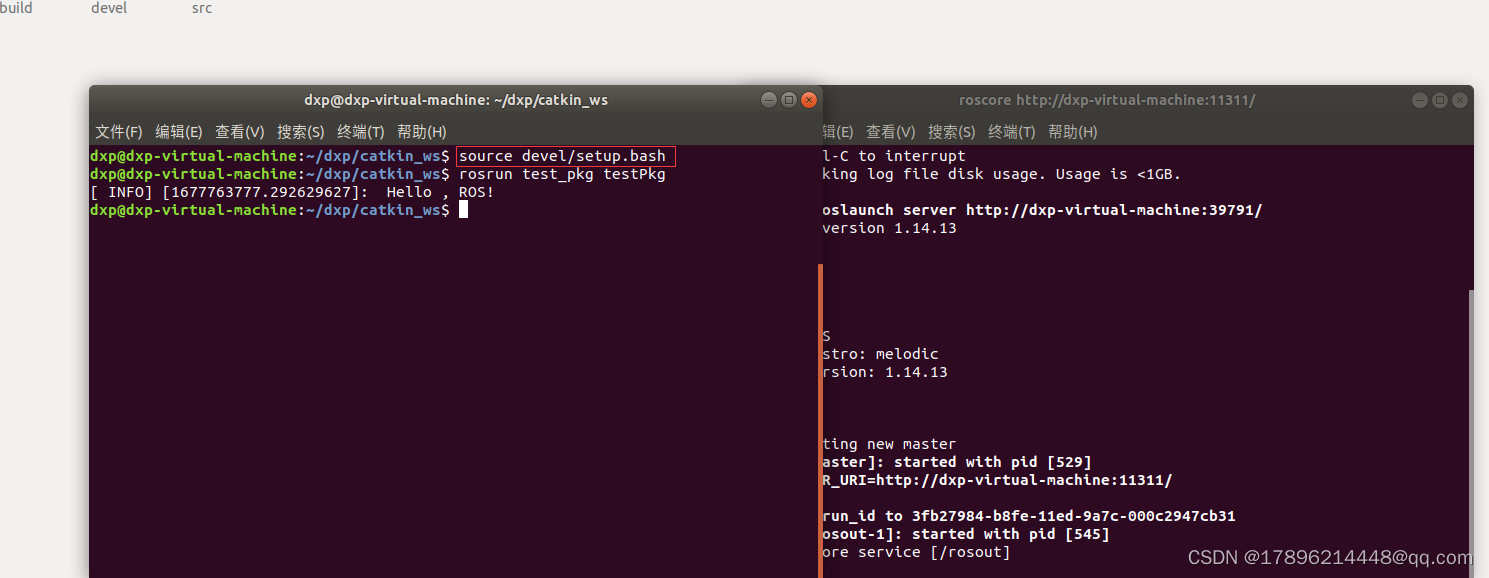
另外一种方法就是加入带到 bash文件中
sudo gedit ~/.bashrc
在最后一行输入
source /home/dxp/dxp/catkin_ws/devel/setup.bash
保存
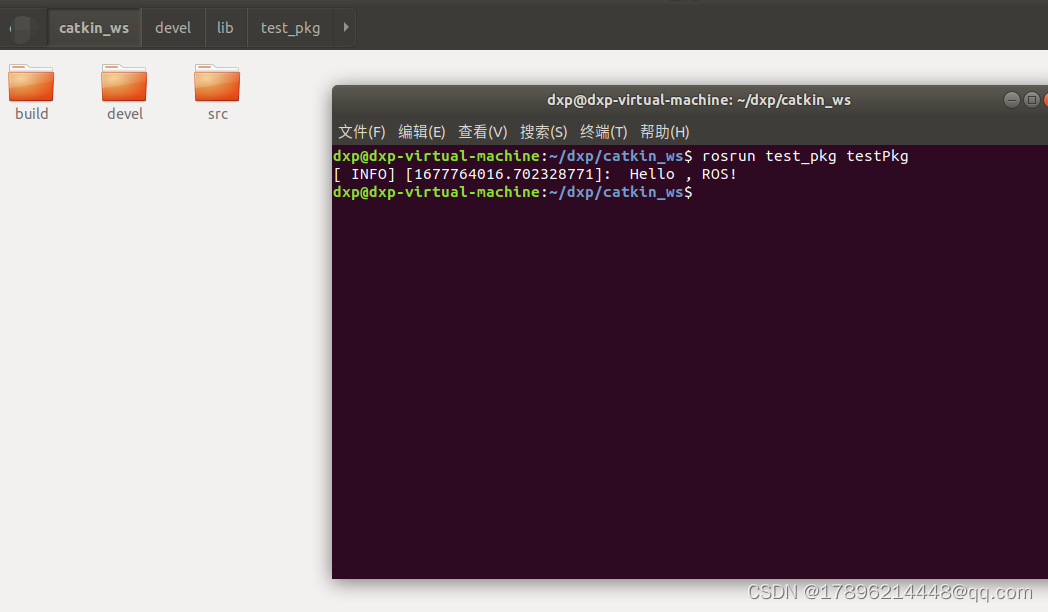
重新输入
rosrun test_pkg testPkg
运行成功
可能这个环境变量还会影响别的,暂时就发现了这些















 1080
1080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









