







作者 | DerekRunberg (USA)
译者 | 透镜
电子开发套件是为了简化使用。就机器人技术而言,提供一个预先构建的底盘、参考代码,乃至一个可实际运行的例子。基于这个例子,能够快速创建可以实际运行的最小系统。一个好的开发套件将大大降低开发难度,我们称之为一步到位的”交钥匙工程”。
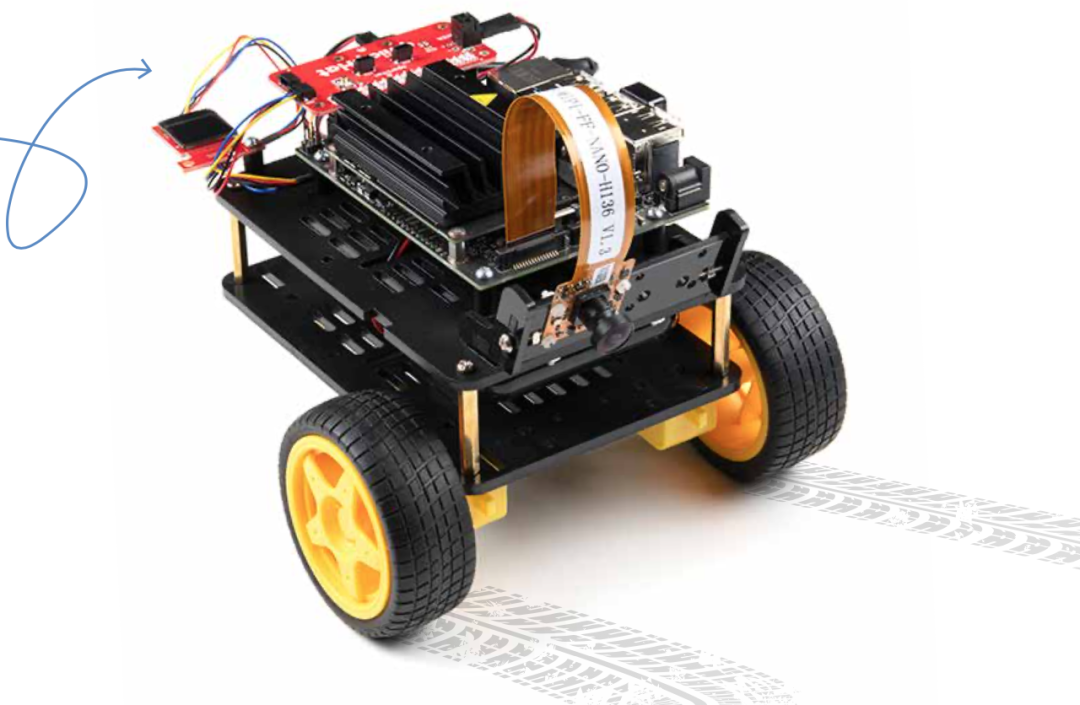
SparkFun JetBot AI套件正是此类套件。它由NVIDIA发起,基于开源JetBot项目,为没有3D打印的客户提供现成购买方案。此版本的JetBot提供了快速构建桌面机器人的模块,包括底盘和所有必要的机械系统。该套件还提供了Jetson Nano开箱即用的相机视觉 (CV) 和机器学习 (ML) 基础知识所需的组件。SparkFun JetBot AI套件节省了3D打印的时间,以及早期原型制作的大量工作。
我经常遇到关于JetBot可扩展性的问题,比如“可以以此为基础,进行机器人系统扩展吗”,答案当然是肯定的。Jetbot作为桌面级产品,使用了较少的传感器,可以很容易适配不同的底盘、电机和摄像头。然而,这些对我来说都是理论上的,所以我决定卷起袖子,深入研究,看看哪些部分对升级我的 JetBot 有意义。这篇文章记录了我使用JetBot套件进行升级扩展过程中所踩过的坑,以及取得的进展。
规 划
拿到JetBot,首先需要确定哪些东西能为我所用。就NVIDIA Jetson Nano而言,如果要使用Qwiic生态系统的板卡,那么就需要用到Python,以及一些其他的支持。从Github可以获取Qwiic_Py库,找到针对板卡所支持的对应驱动目录。JetBot使用了其中的两个驱动:Qwiic电机驱动器和Qwiic OLED显示器。深入地查看驱动列表后,我在想,为我的机器人添加什么功能,才能构建出下一代机器人。花了一些时间研究后,我确定使用三个不同的板卡,这些板卡可以释放出最大的潜力(见图 1)。

图1 选择用于升级JetBot的3个SparkFun板卡
(1)GPS-RTK-SMA ZED-F9P
对我来说,高端机器人需要GPS,更不用说远离办公桌的室外机器人了。u-blox的 ZED-F9P模块具有最新、最出色的技术,包括执行实时运动学 (RTK) 将精度提高到毫米的能力(使用基站)。GPS可以被用作导航和远程
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 611
611











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









