






异步电机无传感器矢量控制的算法,matlab,仿真模型,采用转子磁链定向控制算法,转子磁链观测器采用电压模型+电流模型补偿算法。
YID:8688667414516678
专业电机控制
异步电机无传感器矢量控制算法是一种用于控制异步电机运行的高级控制方法。它通过测量电流和电压等信号,利用先进的算法实现对电机的精确控制,提高电机的效率和性能。本文将对异步电机无传感器矢量控制算法进行详细的分析和研究,结合Matlab仿真模型,探讨其在实际应用中的优势和局限性。
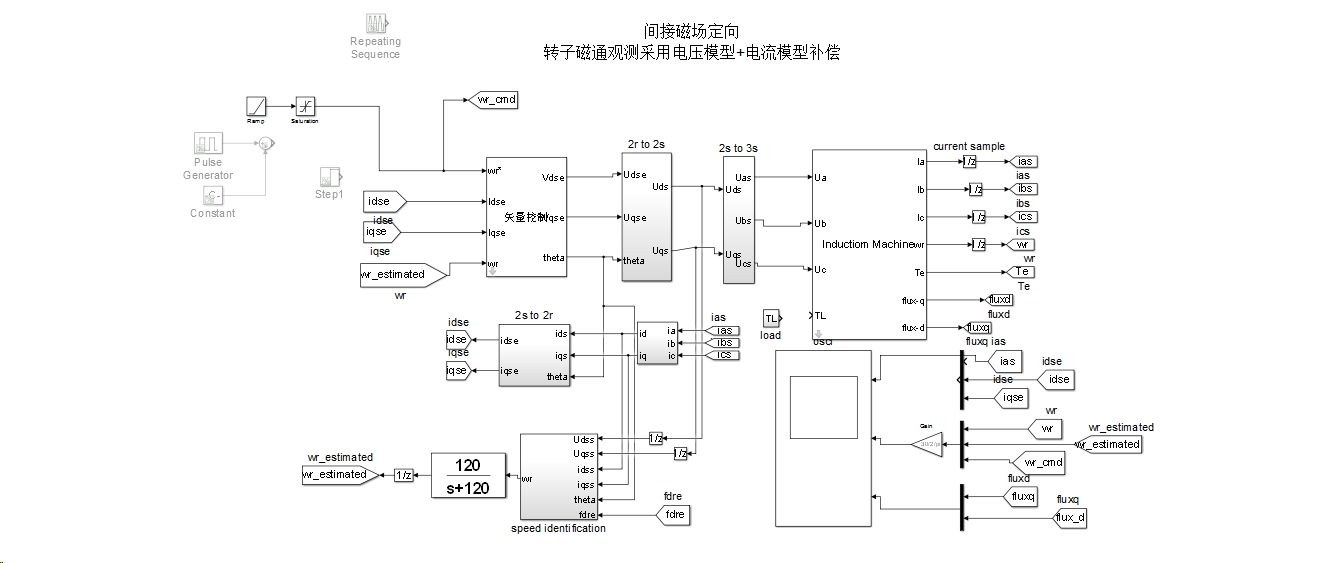
首先,异步电机无传感器矢量控制算法采用转子磁链定向控制算法,通过测量电机的电流和电压信号,实时计算出电机转子位置和转子磁链信息。转子磁链观测器采用电压模型和电流模型补偿算法,通过对电机的电流和电压进行补偿,提高了转子磁链的观测精度和控制性能。
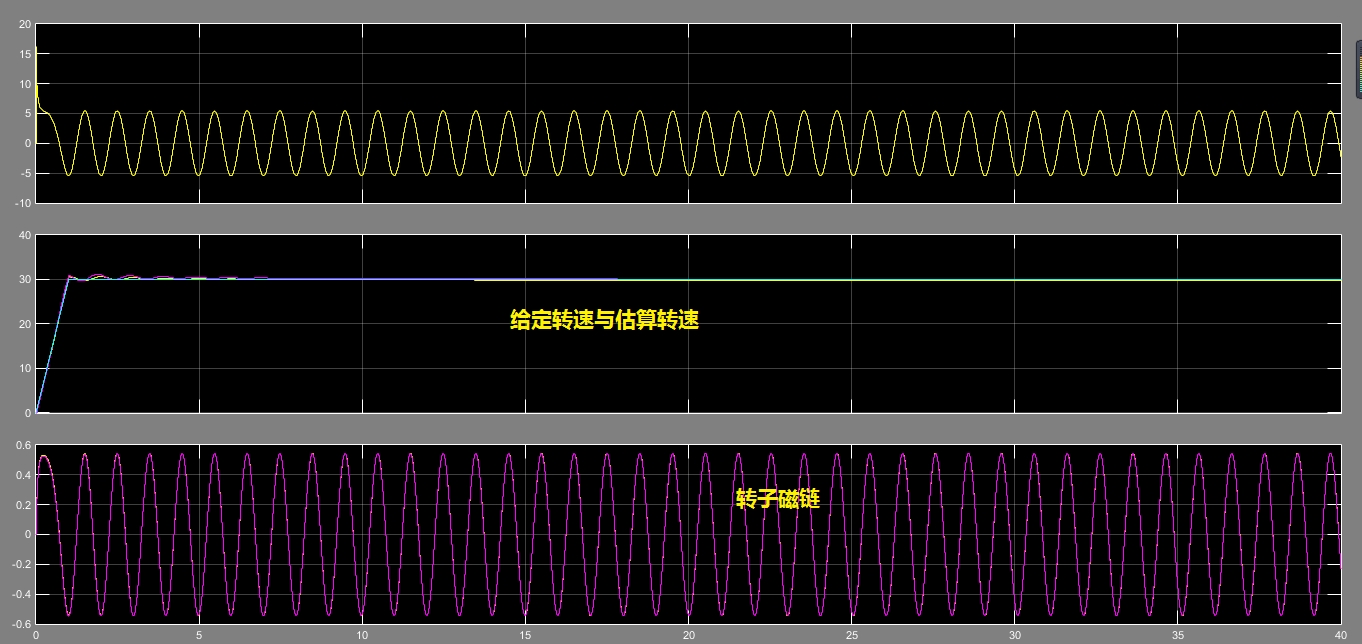
其次,本文使用Matlab进行仿真模型搭建,通过对算法的仿真分析,验证了异步电机无传感器矢量控制算法的有效性和可行性。仿真结果显示,该算法能够实现对电机的精确控制,提高了电机的响应速度和转矩控制精度。同时,仿真模型还考虑了电机的参数变化和负载扰动等因素,验证了该算法在实际工作环境中的鲁棒性和稳定性。
然后,文章将重点分析异步电机无传感器矢量控制算法的优势和局限性。首先,该算法无需使用传感器来测量电机的转子位置和转子磁链信息,简化了系统结构,提高了系统的可靠性。同时,该算法具有较高的控制精度和响应速度,能够满足对电机运行过程中高性能的要求。
然而,异步电机无传感器矢量控制算法也存在一定的局限性。首先,由于算法对电机模型的准确性要求较高,对电机的参数变化和负载扰动较为敏感。其次,由于算法需要实时计算和观测电机的转子位置和转子磁链信息,对硬件计算能力和采样率有一定的要求。此外,算法的实时性和稳定性也需要进一步优化和改进。
综上所述,异步电机无传感器矢量控制算法是一种高级的电机控制方法,通过转子磁链定向控制算法和转子磁链观测器,实现了对电机的精确控制。本文通过Matlab仿真模型的搭建和分析,验证了该算法的优势和局限性。进一步的研究可以围绕优化算法的实时性和稳定性,改进对电机参数变化和负载扰动的适应性。该算法在实际应用中具有广阔的前景和潜力,能够提高异步电机的效率和性能,推动电机控制技术的发展。
相关的代码,程序地址如下:http://nodep.cn/667414516678.html
















 423
423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









