







前面的文章我们了解了到对于一个线性动态系统(比如说卡尔曼滤波)中的filtering问题可以用预测和跟新两个步骤求解,因为它们的后验概率和条件概率都服从高斯分布,所以比较容易求出解析解,但是对于非线性非高斯的动态系统,我们是无法求出其解析解的,那么这个时候该怎么做呢?于是人们就想到了借助采样的思想。
蒙特卡洛采样:
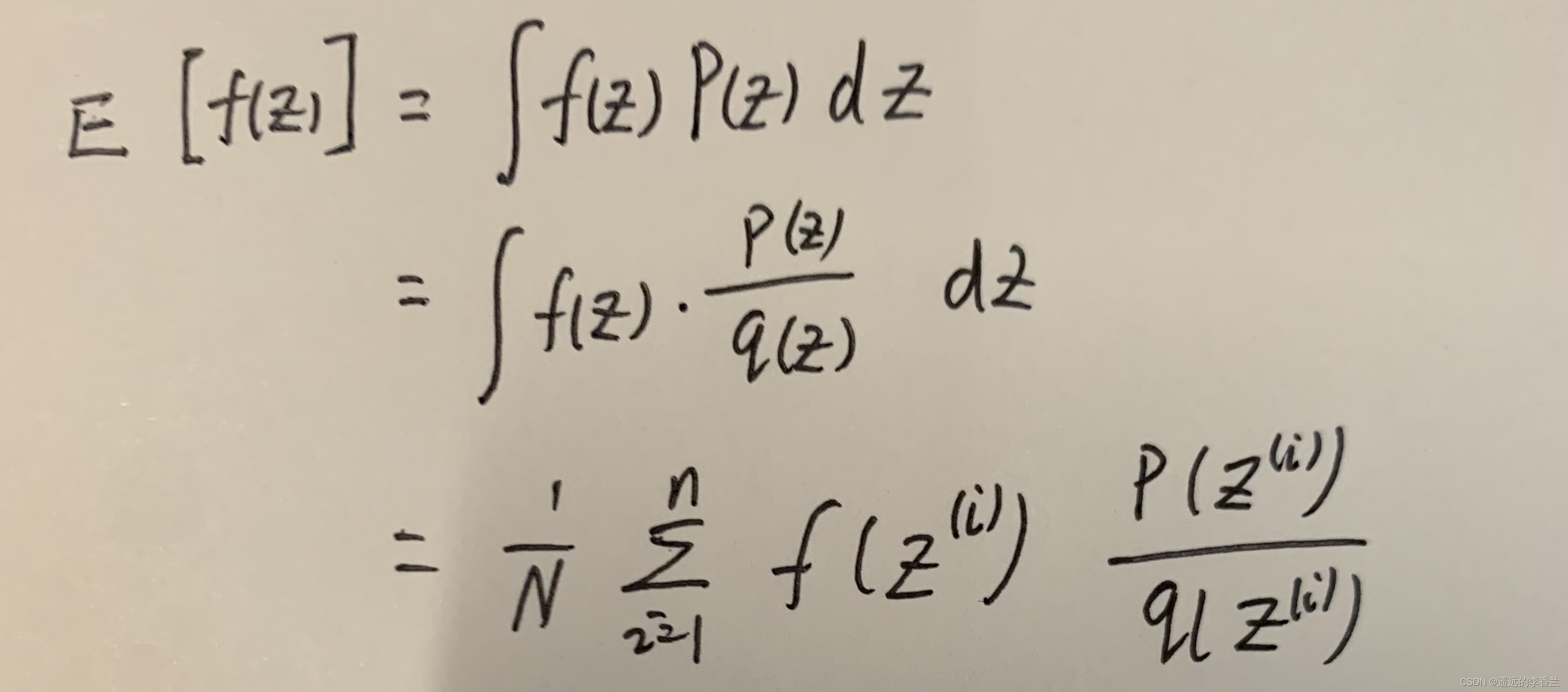
贝叶斯推断问题主要在于求解 P ( z ∣ x ) P(z|x) P(z∣x)这个后验概率,但是这个后验概率不好求,于是蒙特卡洛就提出用采样的办法来近似等替后验概率。但是大多数应用中,我们更关心后验的期望,而不是后验的本身。后验的期望: E z ∣ x [ f ( z ) ] = ∫ f ( z ) P ( z ) d x E_{z|x}[f(z)]=\int f(z)P(z)dx Ez∣x[f(z)]=∫f(z)P(z)dx,然后我们对后验P(Z)进行采样(采N个样本, Z ( i ) Z^{(i)} Z(i)~ P ( z ) P(z) P(z)),那么上面的期望就可以近似为: E z ∣ x [ f ( z ) ] = ∫ f ( z ) P ( z ) d x ≈ 1 / N ∑ i = 1 n f ( z ( i ) ) E_{z|x}[f(z)]=\int f(z)P(z)dx \approx 1/N\sum_{i=1}^{n}f(z^{(i)}) Ez∣x[f(z)]=∫f(z)P(z)dx≈1/Ni=1∑nf(z(i))但是这里有个问题,就是说我们对后验 P ( z ) P(z) P(z)进行采样是比较困难的,因为有些时候 P ( z ) P(z) P(z)的维度很高等等,于是就有了下面的方法解决这个问题。
重要性采样
思想:引入一个已有的、相对比较简单的分布
q
(
z
)
q(z)
q(z),我们把
q
(
z
)
q(z)
q(z)叫做提议分布,然后我们就从
q
(
z
)
q(z)
q(z)中进行采样。于是我们就有如下公式
其中
p
(
z
(
i
)
)
q
(
z
(
i
)
)
\frac{p(z^{(i)})}{q(z^{(i)})}
q(z(i))p(z(i))叫做权重,记为
w
(
i
)
w^{(i)}
w(i),表示第i个样本权重。如果我们使用重要性采样的方法去解决filtering问题,那么我们就必须要求出t=1时刻到t=T时刻的权重:
w
t
(
i
)
=
p
(
z
t
(
i
)
∣
x
1
:
t
)
q
(
z
t
(
i
)
∣
x
1
:
t
)
w_t^{(i)}=\frac{p(z_t^{(i)}|x_{1:t})}{q(z_t^{(i)}|x_{1:t})}
wt(i)=q(zt(i)∣x1:t)p(zt(i)∣x1:t)
w
1
(
1
)
,
w
1
(
2
)
,
.
.
.
,
w
1
(
n
)
,
w
2
(
1
)
,
w
2
(
2
)
,
.
.
.
,
w
2
(
n
)
,
.
.
.
,
w
T
(
1
)
,
w
T
(
2
)
,
.
.
.
,
w
T
(
n
)
w^{(1)}_1,w^{(2)}_1,...,w^{(n)}_1,w^{(1)}_2,w^{(2)}_2,...,w^{(n)}_2,...,w^{(1)}_T,w^{(2)}_T,...,w^{(n)}_T
w1(1),w1(2),...,w1(n),w2(1),w2(2),...,w2(n),...,wT(1),wT(2),...,wT(n)
这样计算是非常麻烦,非常困难的。 那么我们就想能不能找到一个w的递推公式。我们就有了下面的新的采样方法。
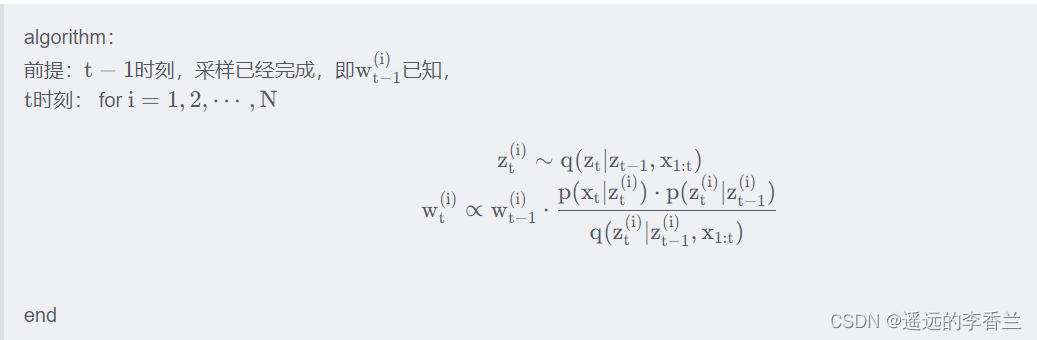
Sequential Importance Sampling(SIS)采样
那么SIS是如何和找到
w
t
(
i
)
和
w
t
−
1
(
i
)
w_t^{(i)}和w_{t-1}^{(i)}
wt(i)和wt−1(i)之间的关系呢?
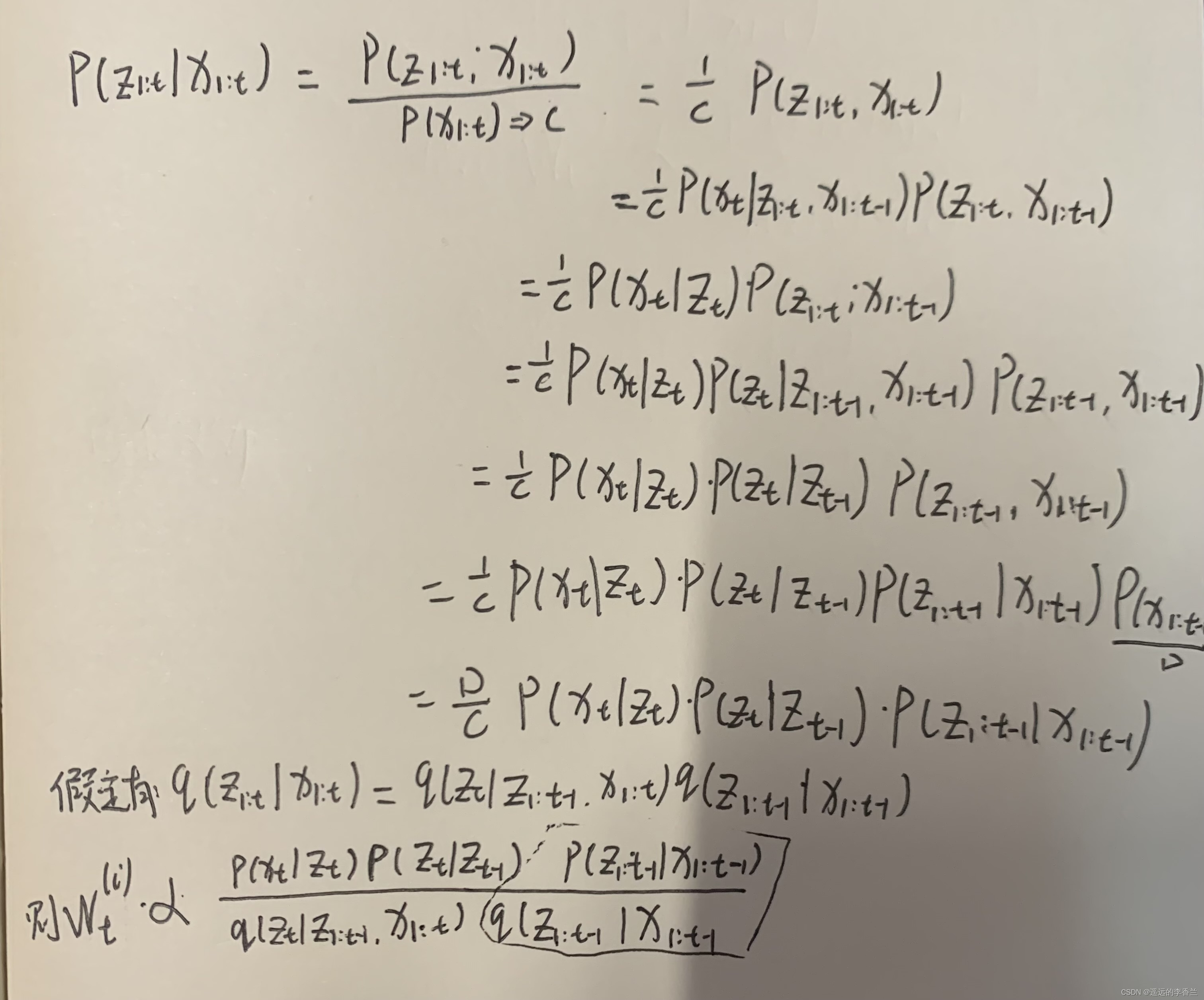
SIS对filtering问题,它不关心
P
(
z
t
∣
x
1
:
t
)
P(z_t|x_{1:t})
P(zt∣x1:t),它关心的是
P
(
z
1
:
t
∣
x
1
:
t
)
P(z_{1:t}|x_{1:t})
P(z1:t∣x1:t)(这样使计算方便)。那么对于
w
t
(
i
)
∝
p
(
z
1
:
t
∣
x
1
:
t
)
q
(
z
1
:
t
∣
x
1
:
t
)
w_t^{(i)}\propto\frac{p(z_{1:t}|x_{1:t})}{q(z_{1:t}|x_{1:t})}
wt(i)∝q(z1:t∣x1:t)p(z1:t∣x1:t).递推公式如下:
SIS算法总结:用SIS求出了
w
t
(
i
)
w_t^{(i)}
wt(i)之后,就可以将其带入重要性采样的那个期望公式中就可以算出期望值。
但是SIS也有一些问题,就是SIS在执行一定次数之后,它会出现权值退化的问题(权值越来越小)。也就会导致出现大量的权重小的粒子样本,而其他几个少量的粒子的权重又很大。对于这样的问题,我们的解决办法有两种:1)重采样 2)选择一个合适的提议分布 q ( z ) q(z) q(z)
重采样
比如说我现在有三个样本以及它们的权重
x
(
1
)
=
0.1
,
x
(
2
)
=
0.1
,
x
(
3
)
=
0.8
x^{(1)}=0.1,x^{(2)}=0.1,x^{(3)}=0.8
x(1)=0.1,x(2)=0.1,x(3)=0.8,然后我们画出他们的累积分布函数:
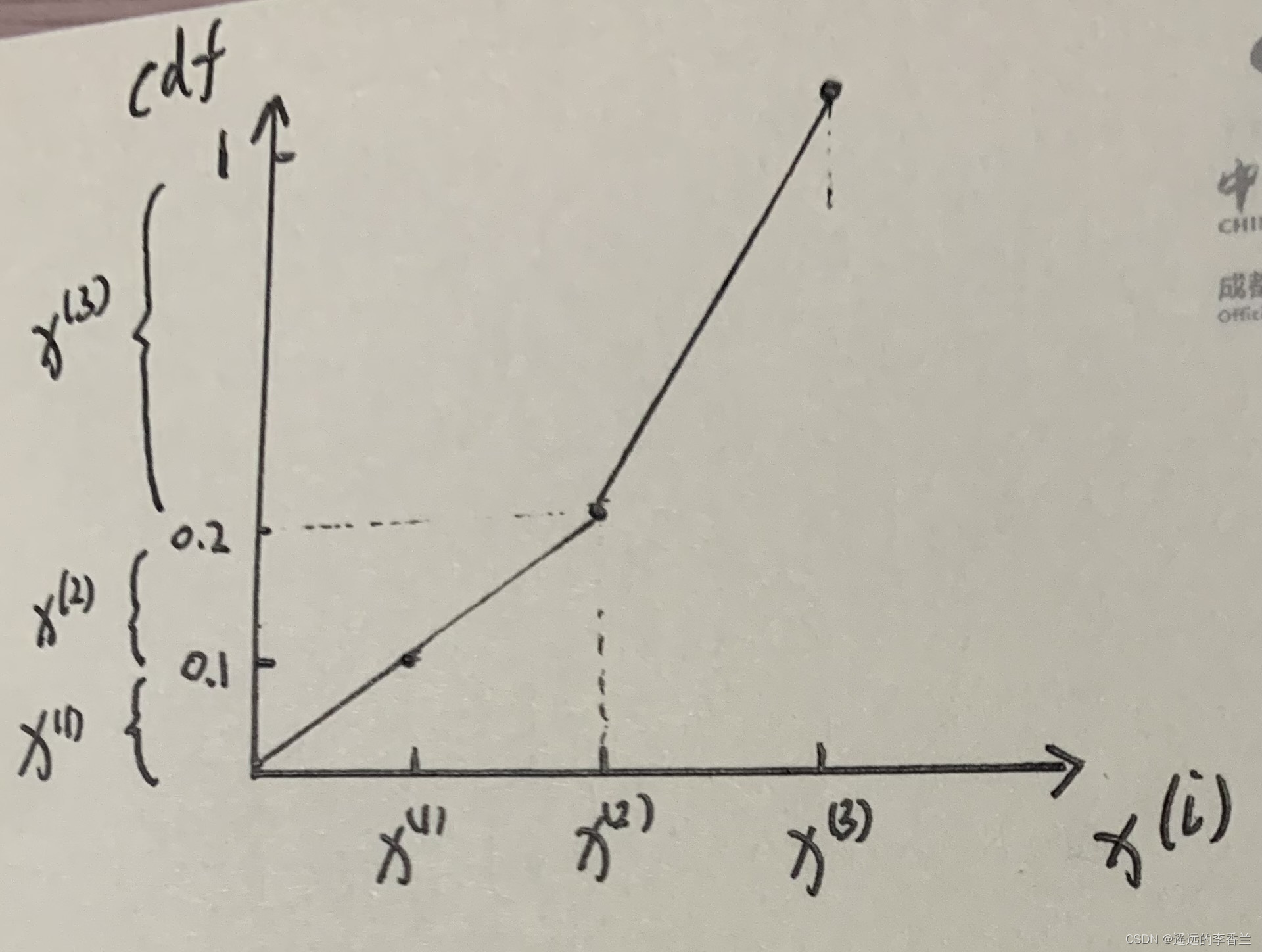
如图所示,我们在纵轴上面划分了三个区域,那么重采样是怎么样的呢?当我们在0-1这个区间随机采样的时候,如果样本点落到那个区域那么就把它划到哪个样本里面,比如说随机采样采到了0.3,那么就它把化为
x
(
3
)
x^{(3)}
x(3)这个样本区间里边,重采样后每个样本的权值都是相同的,比如重采样了N个样本,那么每个样本的权值就是1/N.到这里(这里介绍的重采样是最简单的一种),其实我们用上面所讲的SIS和重采样解决filtering问题的时候就相当于是一个最基本的粒子滤波了(SIS+Resampling)。
SIR滤波
前面我们说对于权值退化的问题,我们有两种方法,一个就是重采样,另一个就是选择一个好的
q
(
z
)
q(z)
q(z),那么什么是好的
q
(
z
)
q(z)
q(z)呢?
一般我们选择
q
(
z
t
∣
z
1
:
t
−
1
,
x
1
:
t
)
=
p
(
z
t
∣
z
t
−
1
)
q(z_t ∣z_{1:t−1} ,x_{1:t})=p(z_t|z_{t-1})
q(zt∣z1:t−1,x1:t)=p(zt∣zt−1),此时
z
t
(
i
)
=
p
(
z
t
∣
z
(
t
−
1
)
(
i
)
)
z_t^{(i)}=p(z_t|z^{(i)}_{(t-1)})
zt(i)=p(zt∣z(t−1)(i))
那么这个时候SIS算法中在计算权重的公式就会发生变化:
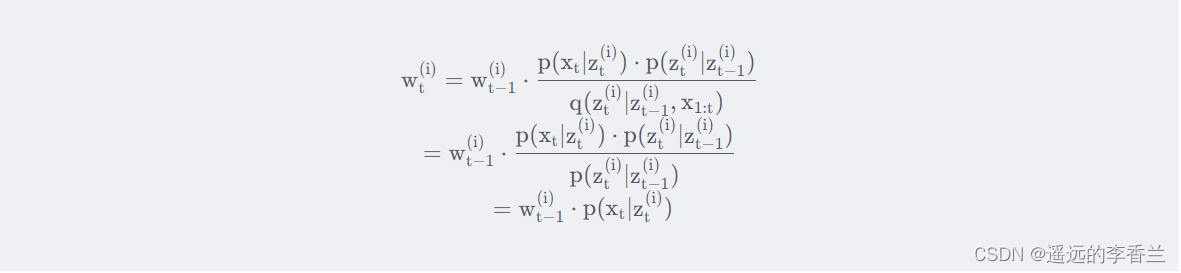
选择
q
(
z
)
q(z)
q(z)经过变换后的SIS就是SIR滤波。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









