









STM32F103 CubeMax HAL 库开发,使用TIM定时器和DMA输出PWM方波
问题描述
我是用的芯片是STM32F103C8T6,其他F103系列的芯片也是一样的。使用CubeMax,并使用HAL库函数对硬件进行驱动。
目标是使用TIM定时器的DMA方式,输出PWM方波。
使用阻塞方式和DMA方式开启PWM的区别
简短结论
先说结论:
如果只是用TIM输出固定占空比的PWM方波,那么阻塞方式和DMA方式其实没有区别。
如果需要输出可变占空比的PWM方波(比如呼吸灯就需要输出可变占空比的方波),那么DMA方式可以减少CPU的负担,推荐使用,无需像阻塞方式一样在主函数的while(1)中改变占空比。
具体分析
从stm32f1xx_hal_tim.h这个头文件中可以看见如下代码片,前四个函数是使用HAL库对TIM进行初始化的函数。
后6个是PWM方波开启的函数,这说明PWM方波的开启有三种方式,分别是阻塞、中断和DMA,其中中断模式我没用过,这里只讨论阻塞和DMA两种模式。
/** @addtogroup TIM_Exported_Functions_Group3 TIM PWM functions
* @brief TIM PWM functions
* @{
*/
/* Timer PWM functions ********************************************************/
HAL_StatusTypeDef HAL_TIM_PWM_Init(TIM_HandleTypeDef *htim);
HAL_StatusTypeDef HAL_TIM_PWM_DeInit(TIM_HandleTypeDef *htim);
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim);
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef *htim);
/* Blocking mode: Polling */
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel);
HAL_StatusTypeDef HAL_TIM_PWM_Stop(TIM_HandleTypeDef *htim, uint32_t Channel);
/* Non-Blocking mode: Interrupt */
HAL_StatusTypeDef HAL_TIM_PWM_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel);
HAL_StatusTypeDef HAL_TIM_PWM_Stop_IT(TIM_HandleTypeDef *htim, uint32_t Channel);
/* Non-Blocking mode: DMA */
HAL_StatusTypeDef HAL_TIM_PWM_Start_DMA(TIM_HandleTypeDef *htim, uint32_t Channel, uint32_t *pData, uint16_t Length);
HAL_StatusTypeDef HAL_TIM_PWM_Stop_DMA(TIM_HandleTypeDef *htim, uint32_t Channel);
我们先来看下网上别人写的呼吸灯的例程(因为呼吸灯需要可变占空比的PWM方波)。
这个例程使用的是阻塞的方式来使能TIM,并且在主函数中更改占空比,以此达到通过不同占空比的方波来实现呼吸灯。
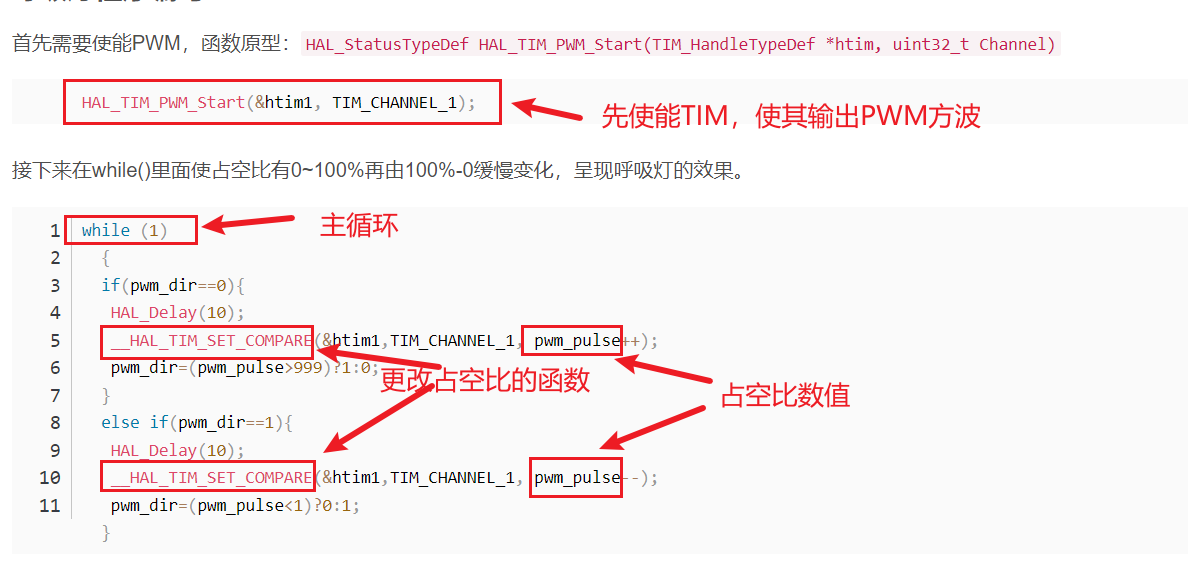
我们可以发现,更改占空比需要在主函数whlie循环中不断使用__HAL_TIM_SET_COMPARE函数更改占空比的值,这样就占用了CPU,如果有其他程序一起运行,就会影响其他函数运行的效率。
但是如果使用DMA的方式,DMA就会帮你自动完成更改占空比这一项工作,那么主循环里面就可以空出来干别的事情了。
不过,如果不需要更改占空比,只是使用固定占空比的PWM方波,那么阻塞和DMA的方式都是使用一条语句来使能TIM,那两种方式就没有区别了。
CubeMax配置
首先是CubeMax里面的常规配置
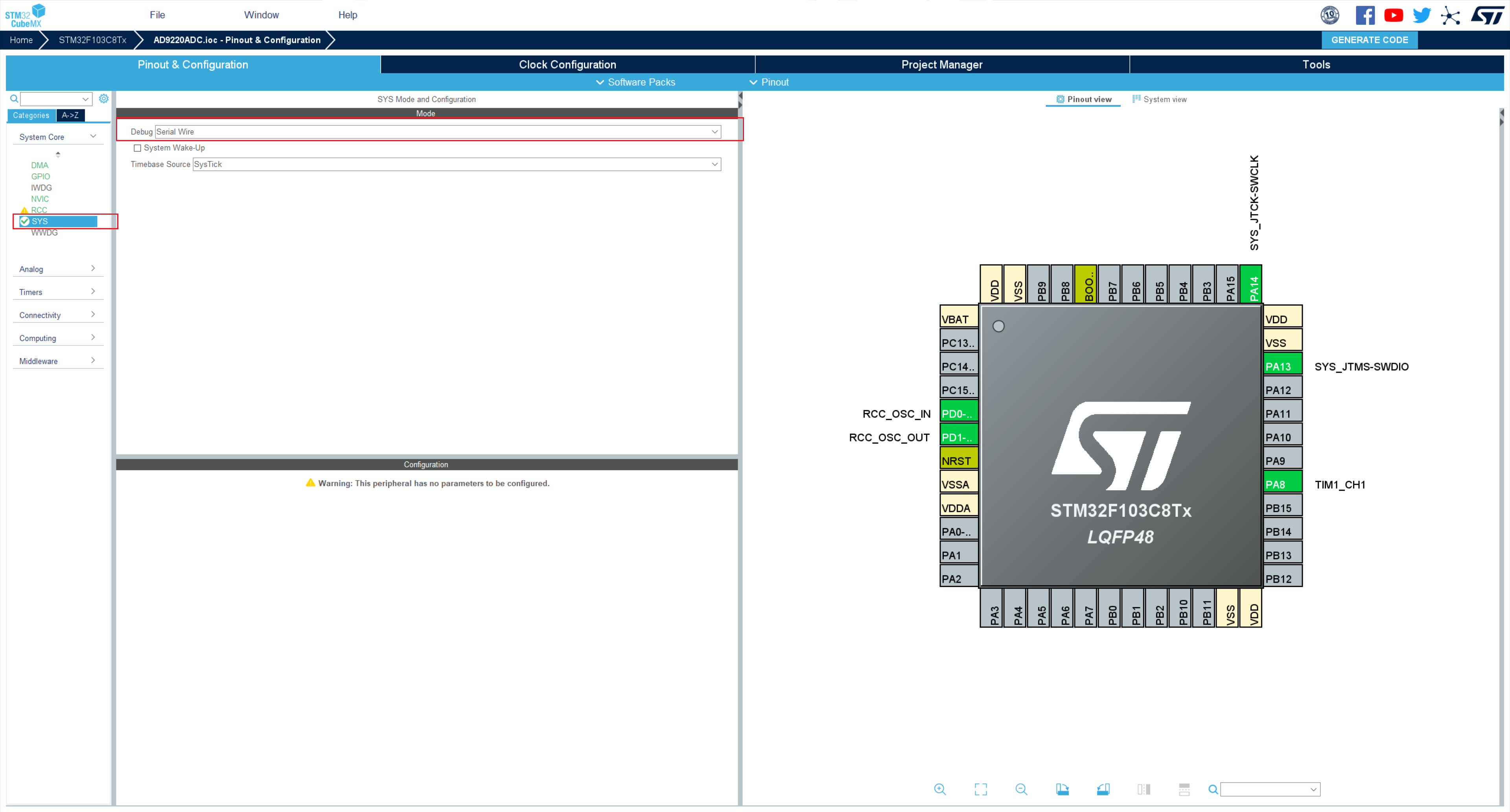
debug设置:
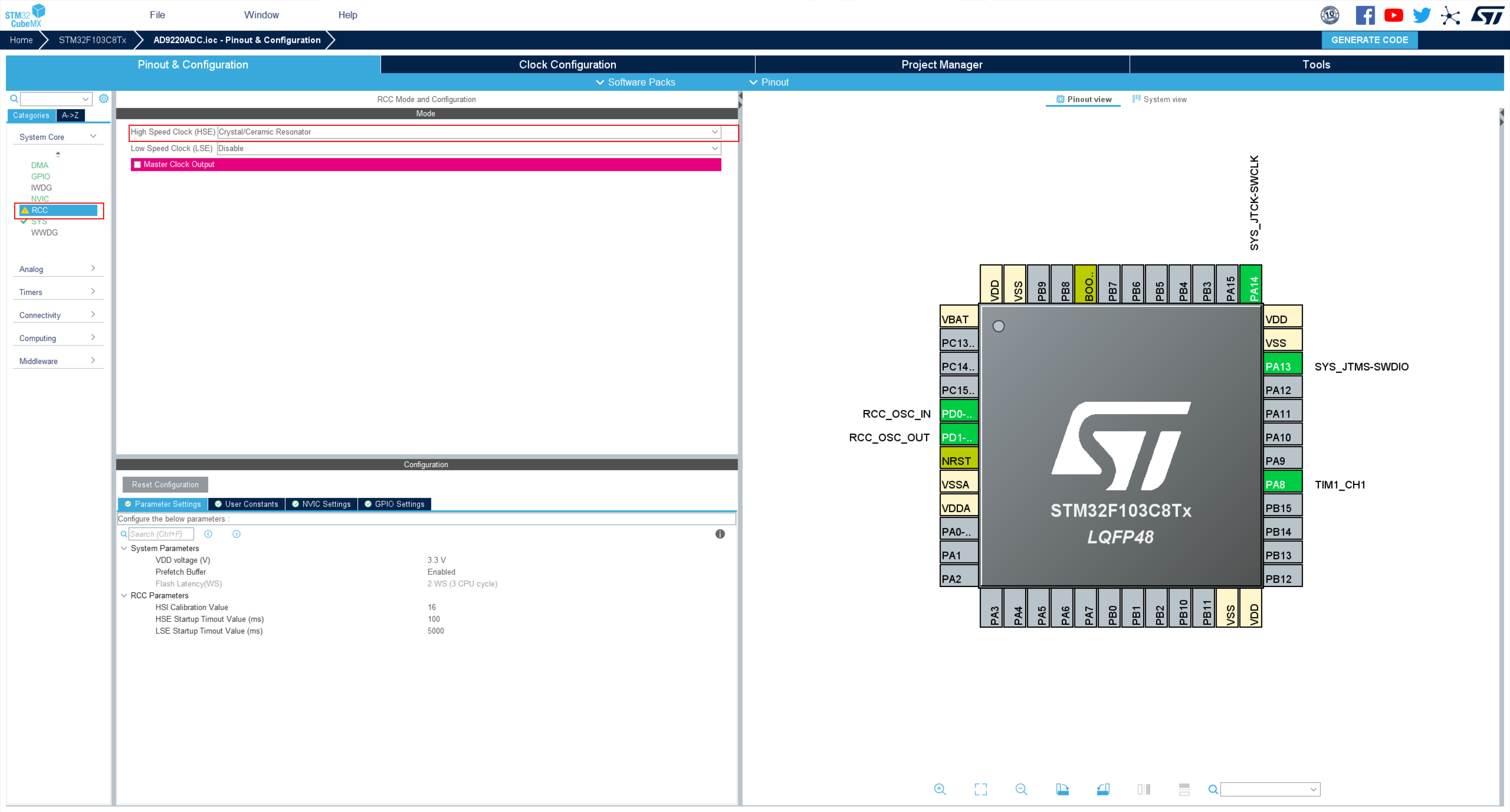
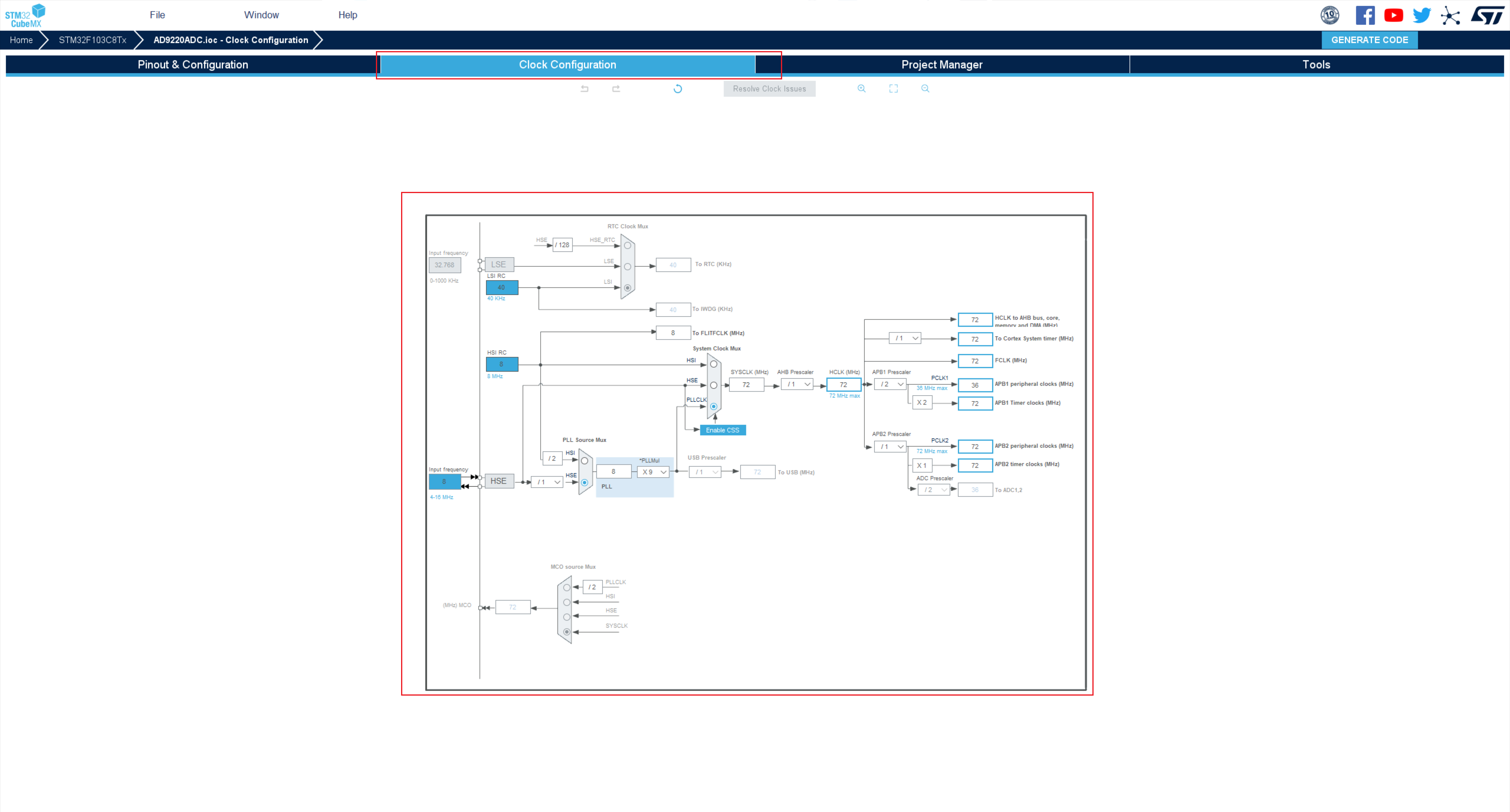
晶振和时钟配置:
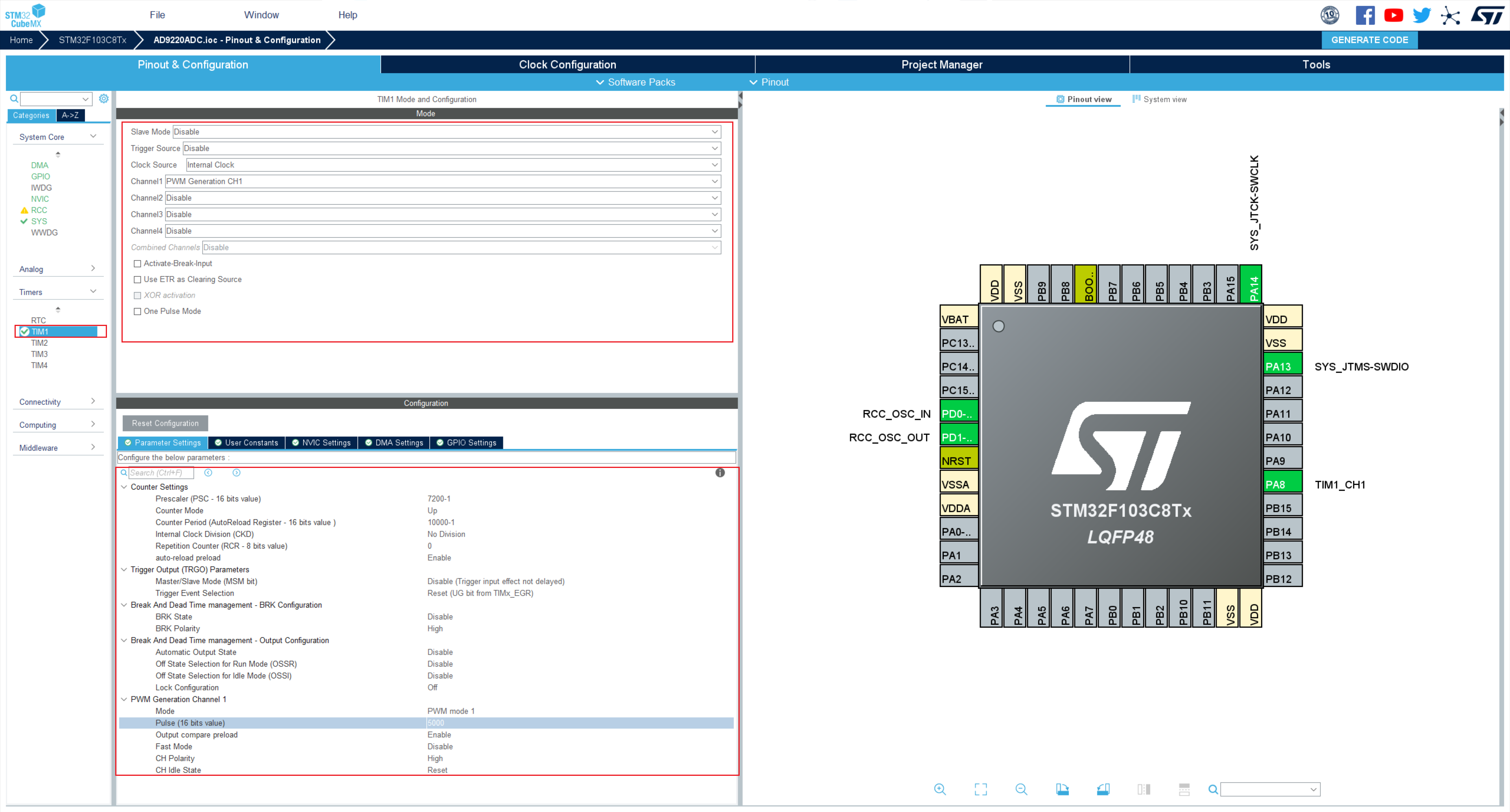
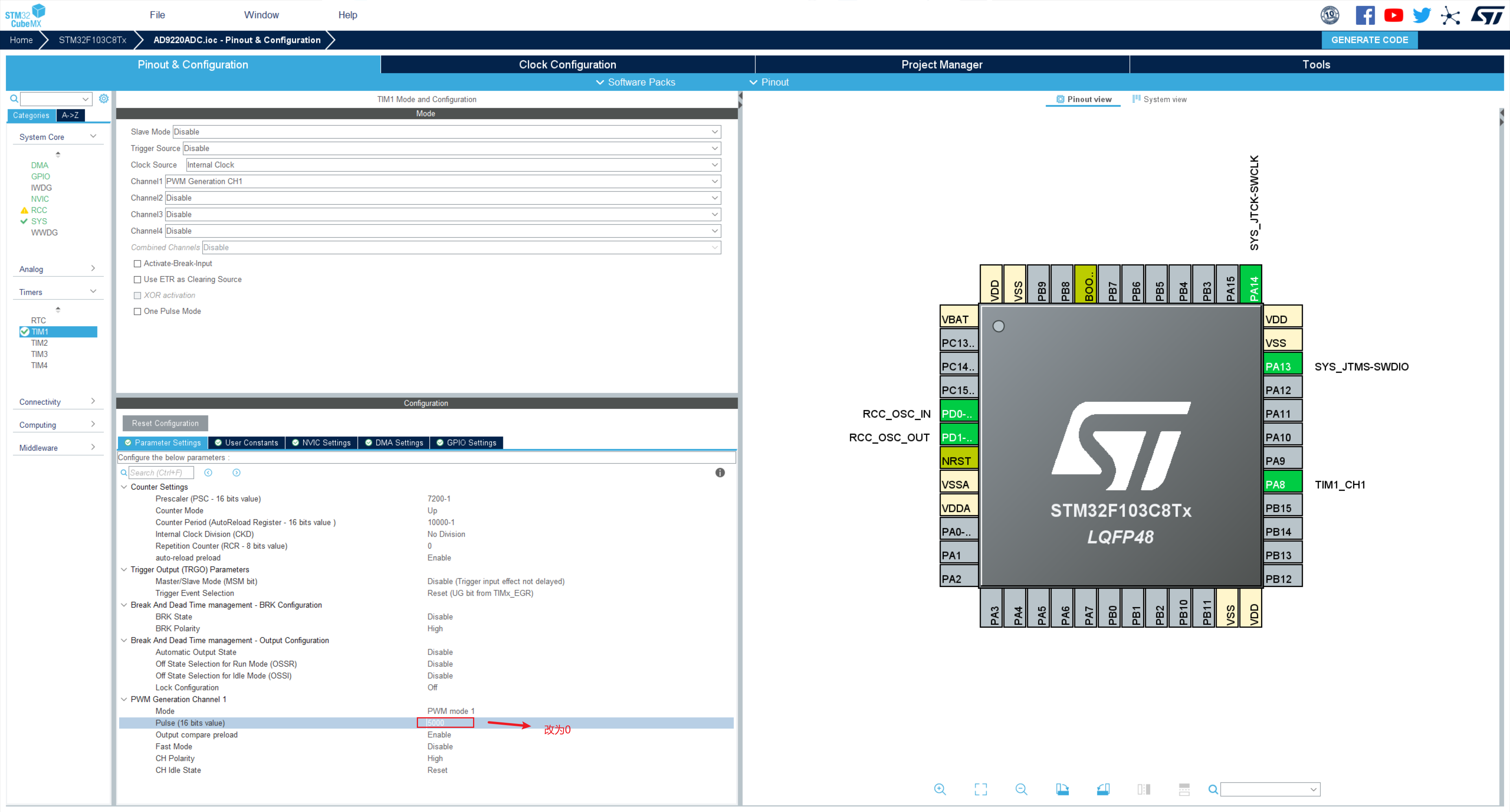
TIM DMA配置
我这里使用的是TIM1的CH1,进行PWM方波输出,然后分频因子和ARR寄存器分别是7200-1和10000-1,这样输出的就是1HZ的方波。
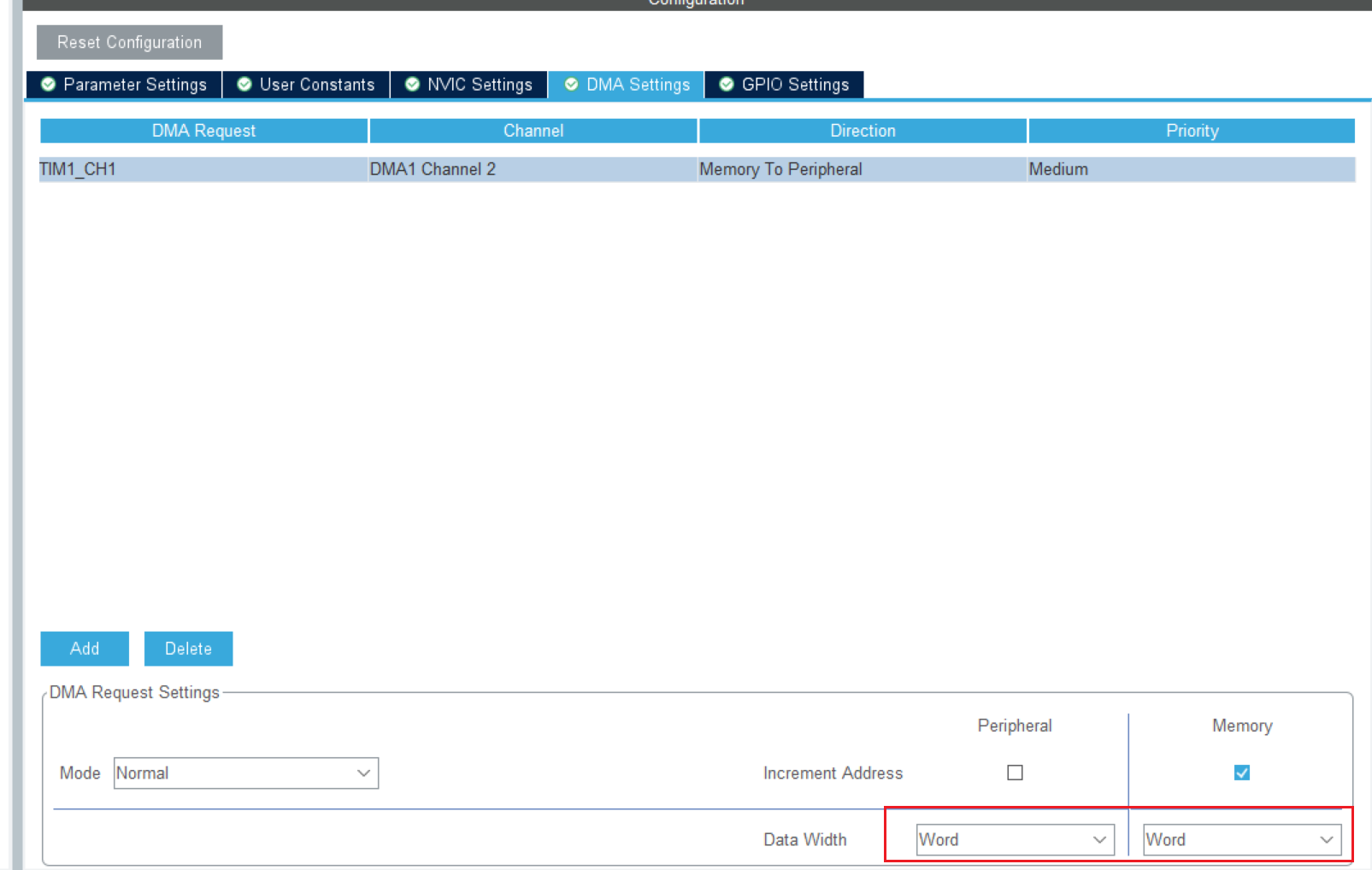
DMA设置,注意这里传输的数据长度要是word,也就是32字节,因为HAL_StatusTypeDef HAL_TIM_PWM_Start_DMA(TIM_HandleTypeDef *htim, uint32_t Channel, uint32_t *pData, uint16_t Length)函数中定义的数据长度就是32字节。
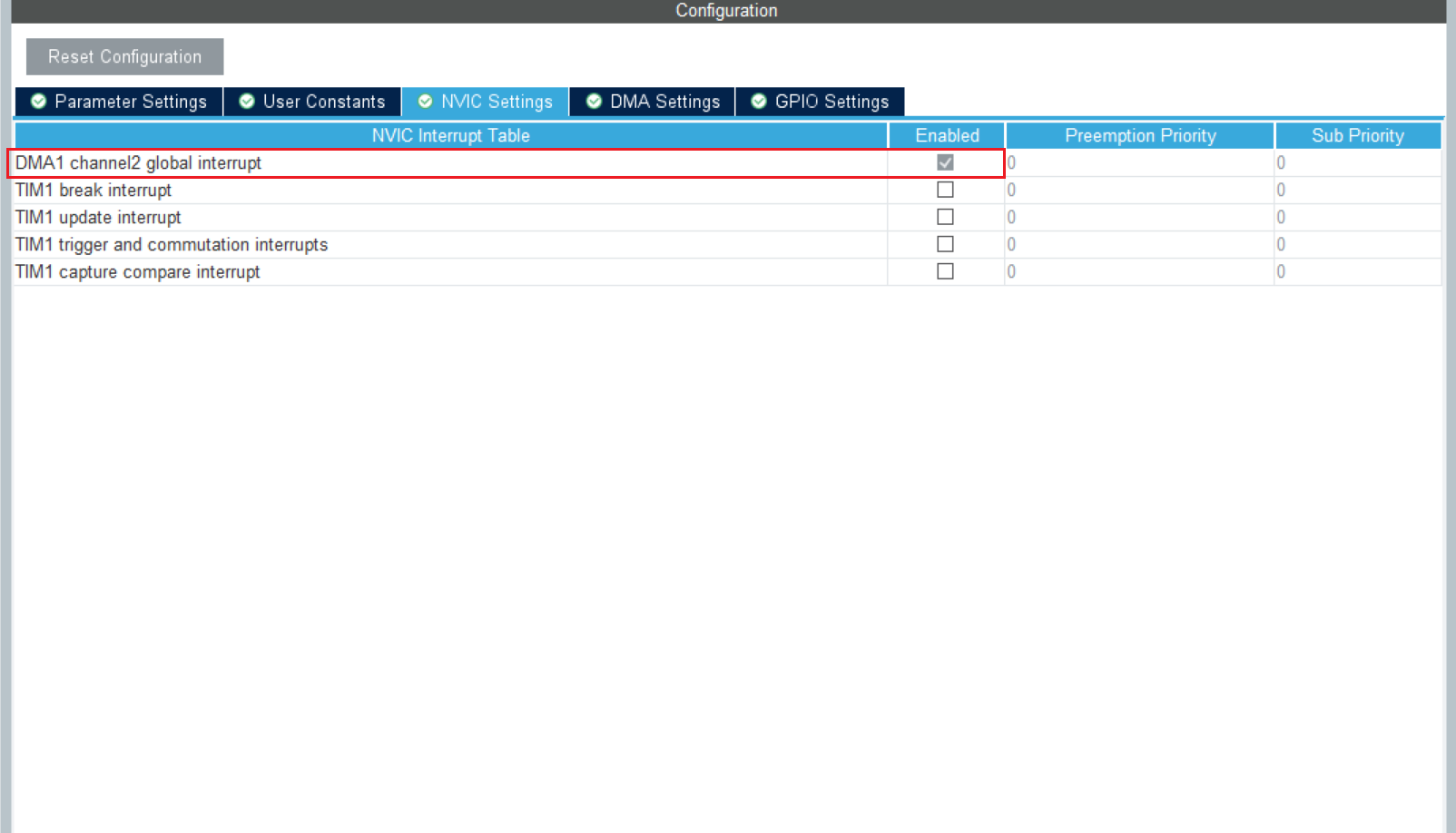
从中可以看到当开启dma之后,CubeMax自动帮我们开启了dma的中断。
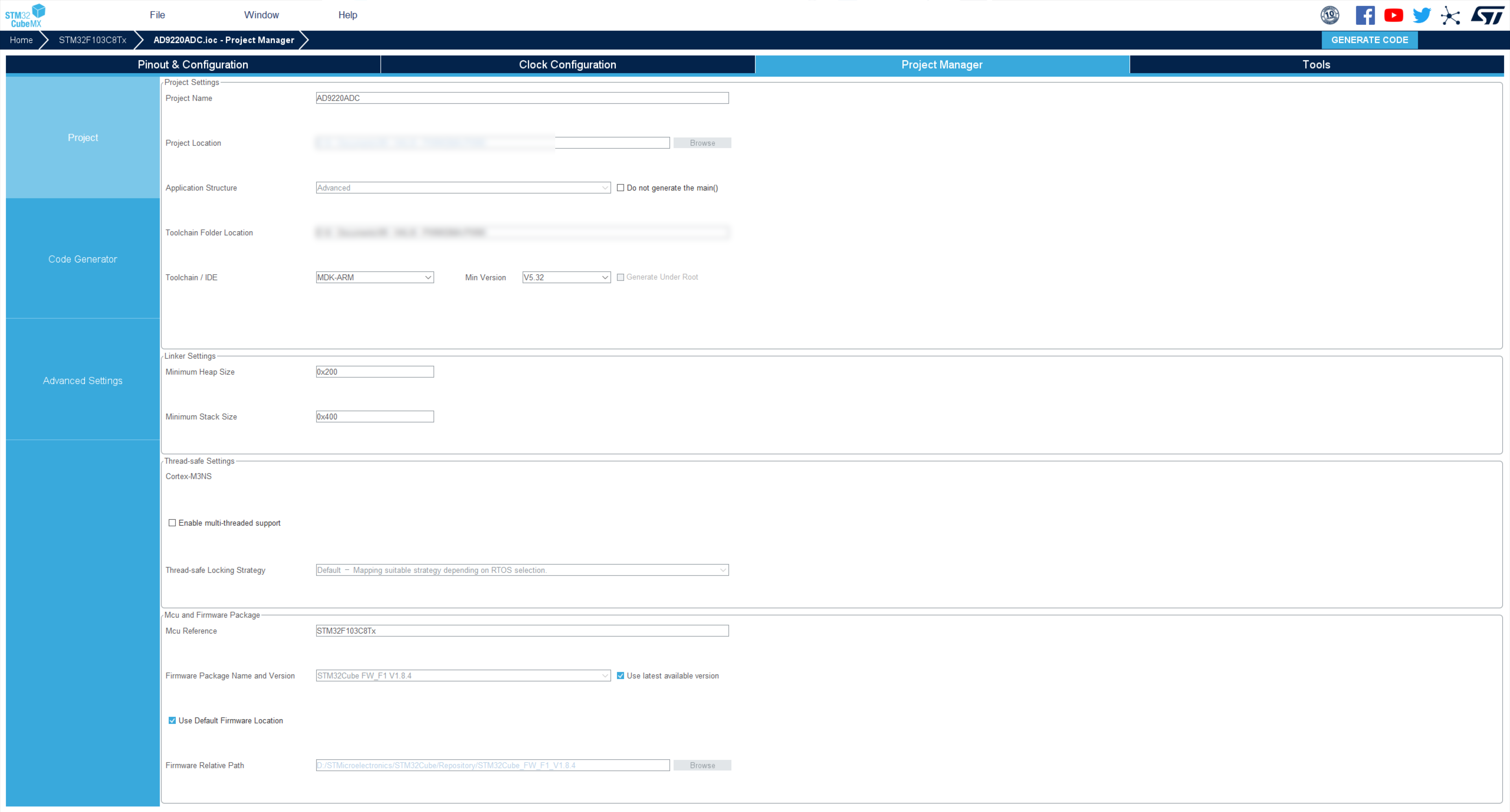
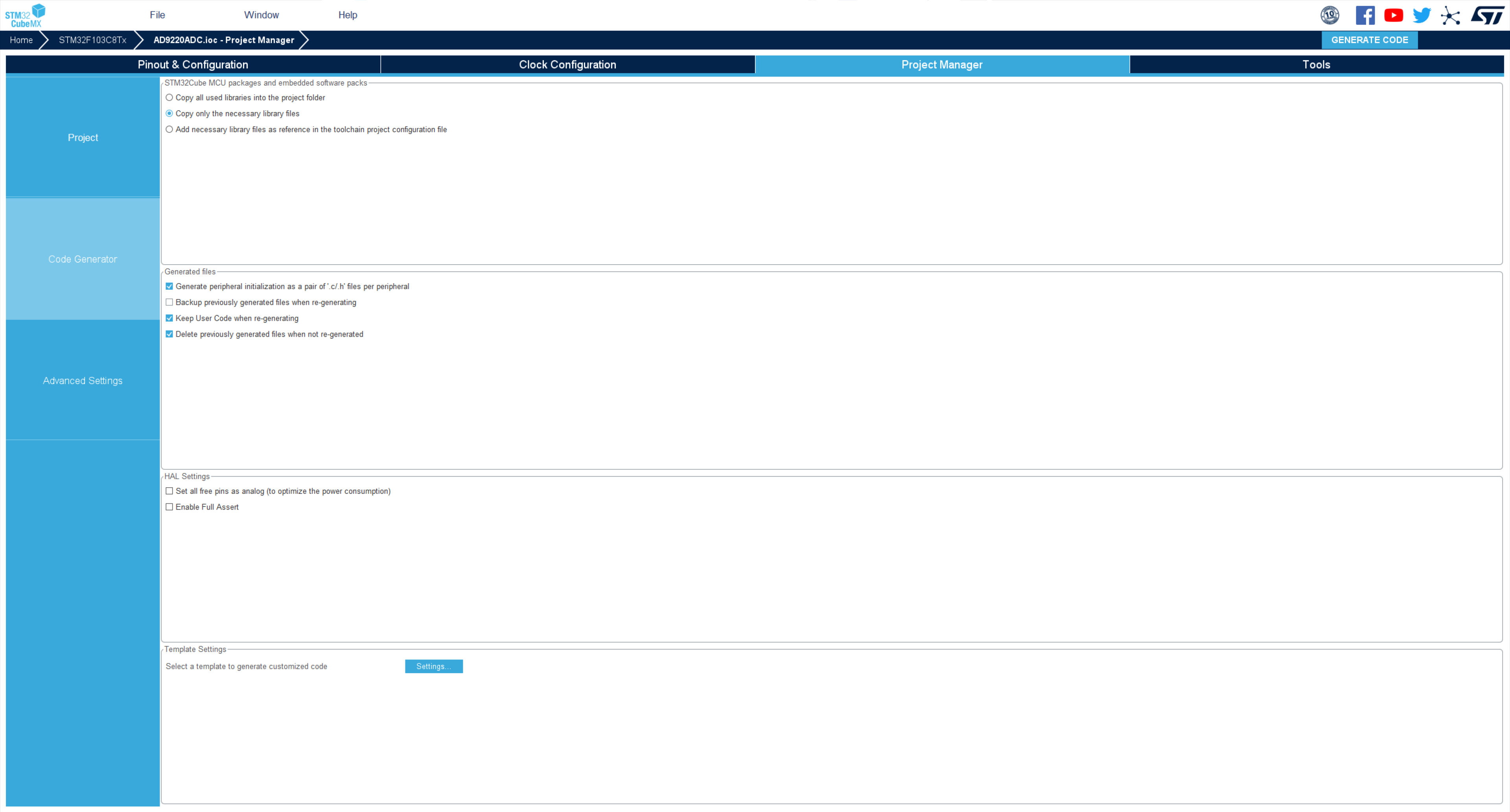
生成工程
KEIL文件撰写
在使用CubeMax生成工程文件后,我们在KEIL文件中打开,进行修改。
首先定义一下使用DMA传输的文件长度
// NUM是需要通过dma传输的数据长度
#define NUM 10
然后定义占空比
// 这个Sendbuf就是占空比 占空比的值除以ARR寄存器的值,即为我们常说的占空比
uint32_t SendBuf[NUM] = {0};
在main函数中(while之前)将占空比的值进行赋值(由于我设置的ARR寄存器的值是10000,那么占空比是1000的时候,占空比就是1000/10000=10%,以此类推)。这样赋值就是希望输出占空比从10%-100%的10个方波。
SendBuf[0] = 1000;
for(int i=1;i<=NUM-1;i++)
{
SendBuf[i] = SendBuf[i-1] + 1000;
}
然后通过DMA的方式使能TIM。
HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1,(uint32_t*)SendBuf,NUM);
此外,我们还需要在main函数的下面定义一下回调函数,回调函数的作用是这样的,当dma传输完所有的数据之后,dma中断会处理这个回调函数。这个函数之前在HAL库中是若定义的,我们在这里可以将它重新定义。
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
HAL_TIM_PWM_Stop_DMA(&htim1, TIM_CHANNEL_1);
}
整个main.c文件中的代码见文末附录
观察实验现象
将程序烧录,观察实验现象。
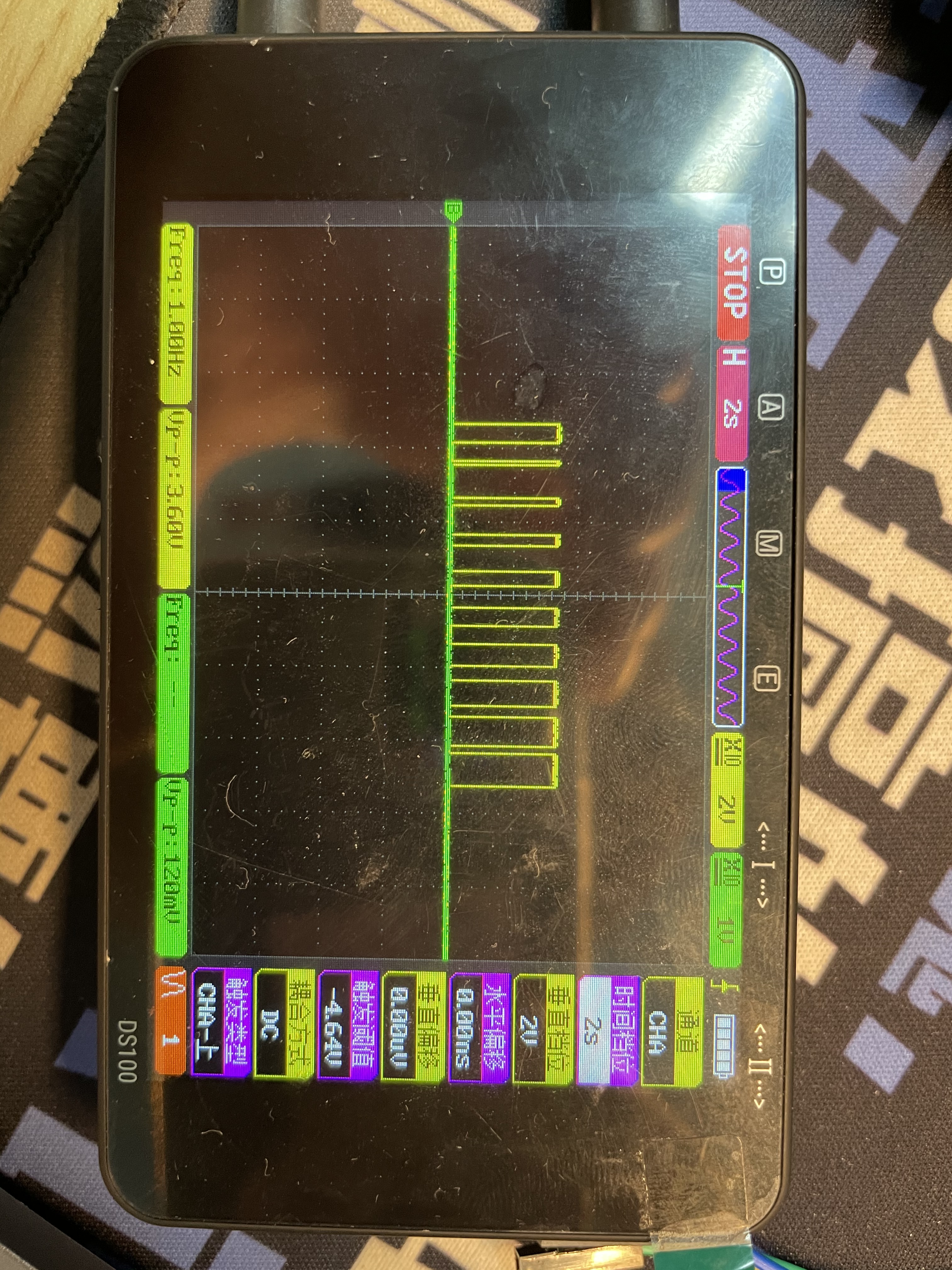
这个波形大致意思对了,但是有两点很奇怪,一是第一个波形按理来说应该是占空比10%,结果这里却是50%,第二点是最后没有占空比100%的波形。还有一点就是输出波形后就没了,不能连续输出。
工程修改
工程修改内容
首先将如图所示的占空比改为0。
为什么要改为0?我的理解是,最开始的一个方波,单片机默认输出的是这里设置的占空比,而非我们设置的SendBuf。
然后将dma普通模式改为循环模式(普通模式下dma只传输一次数据,那必然输出一次方波后,后面就没了)
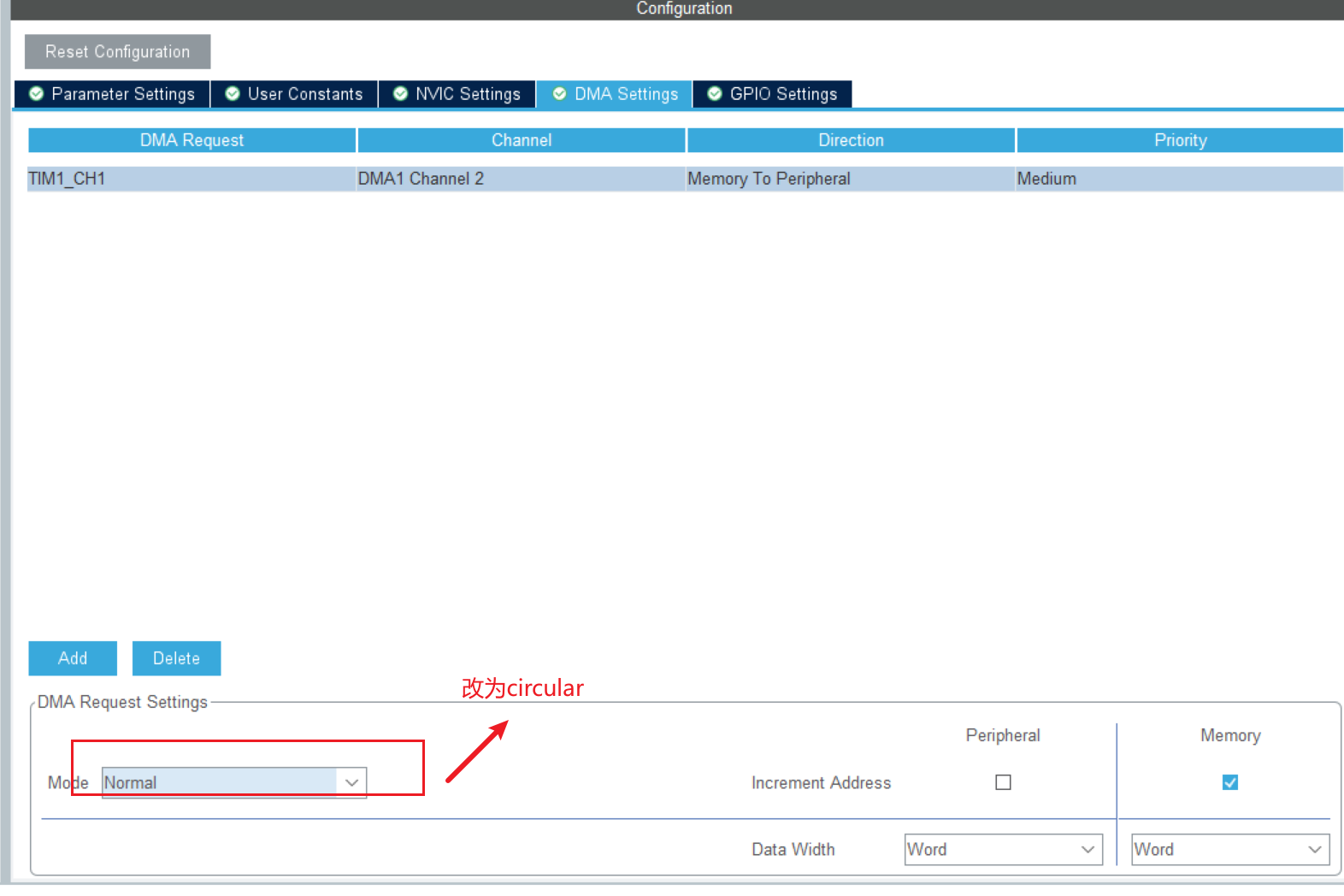
最后注释掉这个回调,意思是不关闭PWM方波,那也就是方波会一直输出,注意注释回调同时一定要将dma传输模式设为circular。

观察现象
可以看到,这次最开始没有占比50%的方波,而且也能循环输出,但是在两次波形之间(从100%到10%占空比)存在问题,这是怎么回事呢?
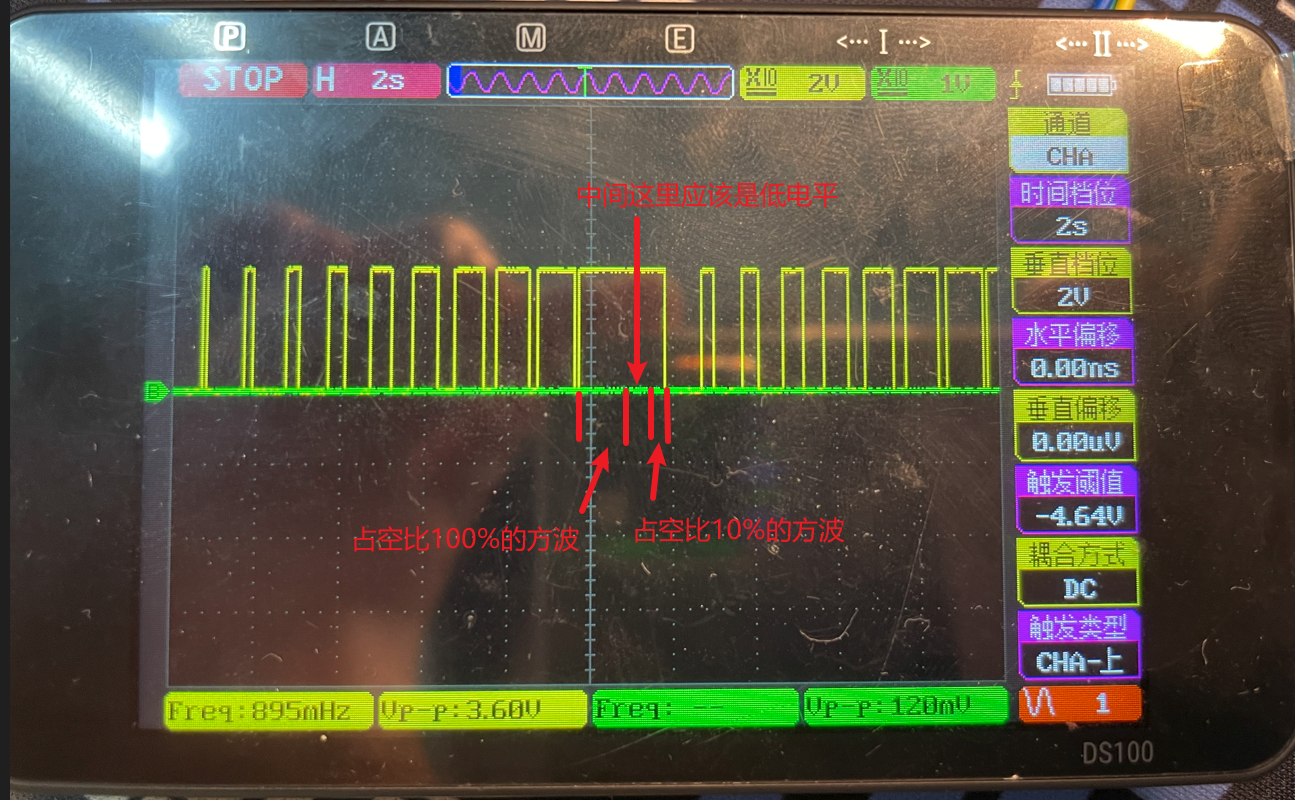
如图所示,中间这一大块高电平是不正常的。但是我们可以将它分为三部分,最左边是占空比o10%的方波,最右边是占空比10%的方波,中间那一块应该是低电平才对,但是这里却成了高电平,暂时不知道为什么。
如果有知道的可以在评论区讨论哈。
appendix
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "dma.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
// NUM是需要通过dma传输的数据长度
#define NUM 10
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
// 这个Sendbuf就是占空比 占空比的值除以ARR寄存器的值,即为我们常说的占空比
uint32_t SendBuf[NUM] = {0};
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
SendBuf[0] = 1000;
for(int i=1;i<=NUM-1;i++)
{
SendBuf[i] = SendBuf[i-1] + 1000;
}
// 通过dma的方式开启PWM通道1
// 在呼吸灯的例子中,dma开启pwm貌似省CPU,因为那种情况下占空比需要不断改变
// 但是在我这个例子中,dma和阻塞方式开启PWM应该都一样,因为只开启一次
// DMA比阻塞方式开启省CPU的原理是:改占空比可以用DMA来改
HAL_TIM_PWM_Start_DMA(&htim1, TIM_CHANNEL_1,(uint32_t*)SendBuf,NUM);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
// PWM DMA 完成回调函数,当一次DMA传输完成之后(即SendBuf里面所有内容传输完成之后),dma中断会处理这个回调
// 如果要一直有pwm波,就注释掉这个回调,并且在CUBEmax中将dma mode 设置为 circular
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
HAL_TIM_PWM_Stop_DMA(&htim1, TIM_CHANNEL_1);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */















 3781
3781











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









