







【平台使用篇|02】| Coptersim系列教程(一)
CopterSim作为RflySim平台核心仿真软件,其主要实现两部分功能:模型和通信,掌握CopterSim使用方法即可轻松运行多旋翼运动动态模型,并连同其他软件构成软/硬件在环仿真。本篇教程将详细介绍CopterSim软件的主平台和功能的简介。
1.1 Rflysim平台的简介
在安装完的RflySim 平台之后,会看到有这样文件夹在桌面生成。
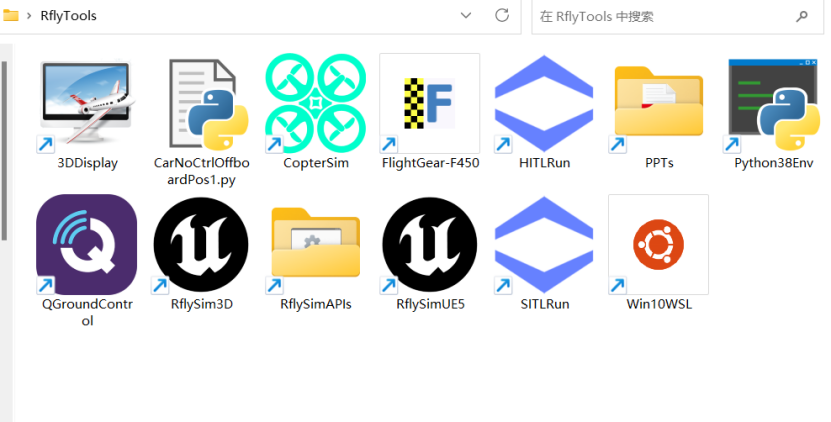
opterSim:本平台核心仿真软件,运行多旋翼运动动态模型,并连同其他软件构成软/硬件在环仿真。
RflySimUE5:本平台核心三维显示软件,基于Unreal Engine引擎开发,具备高逼真虚拟现实显示效果。
HILRun/SILRun一键快速启动脚本,可以快速开启所有视觉/集群相关软件,并完成所需配置。
Python38Env:包含OpenCV等库的一个Python环境。
RflySimAPIs例程文件夹:包含了本课程的所有例程和源码,覆盖了单/多机控制、集群飞行、视觉控制等。
PPTs课件文件夹:包含了本课程对应的所有课件。
QGroundControl(QGC)地面站:包含配置飞控参数和控制飞机起飞、降落、航线等功能。
Win10WSL编译器:用于编译固件和软件在环仿真。
1.2 Coptersim是什么

Coptersim是RflySim平台核心软件,是通信数据的核心,其主要实现两部分功能:模型和通信:
(1)模型是指运动模型DLL,就是可以根据设置的模型参数进行计算,计算后就可以直接进行仿真运行的DLL文件。
(2)通信是指软硬件与CopterSim通过串口(硬件在环HITL)或网络TCP/UDP(软件在环SITL)进行连接。其中,飞控与CopterSim之间使用MAVLink进行数据传输,实现控制闭环,模拟室外飞行情形;CopterSim发送飞机位姿、电机数据到三维引擎,实现可视化展示;CopterSim转发MAVLink消息到Python视觉或QGC地面站,传输飞机实时状态,实现顶层规划控制;CopterSim对MAVLink数据进行压缩后以UDP结构体形式发给集群控制软件,达到通信精简目的(大规模集群需求)。更多资料请参见RflySim平台 PPT 的第七讲。
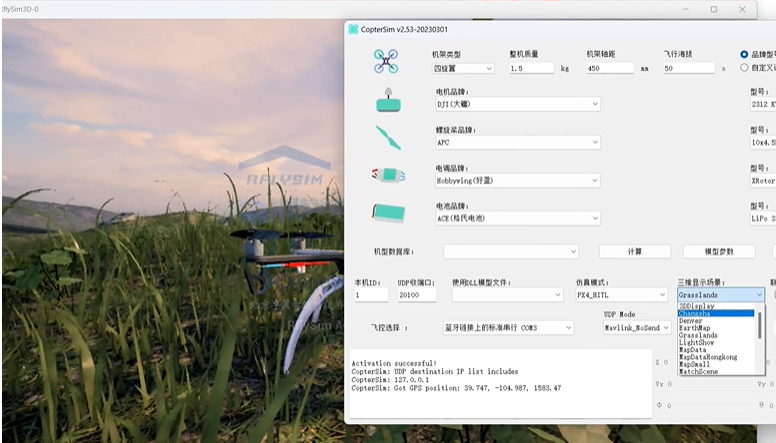
Coptersim 的主界面
桌面Rflytools文件夹,双击Coptersim打开软件。这个主界面分为三部分,上面这一部分是模型配置区,中间是仿真功能区,最下边的是状态显示区。

2.1 Coptersim平台的模型配置区
根据提示,设置需要的机架类型,整机质量,还有机架的轴距,飞行的海拔高度,电机品牌等。其功能与飞行评测网站【https://flyeval.com/paper/】相似,都可以对多旋翼无人机的整机系统进行计算。平台详细的设计思路,还有它背后的模型计算,可以参考这篇论文,里面讲解了平台的设计原理。【CopterSim后台原理性介绍:Dongjie Shi, Xunhua Dai, Xiaowei Zhang, and Quan Quan. A Practical Performance Evaluation Method for Electric Multicopters. IEEE/ASME Transactions on Mechatronics. 2017,22(3):1337-1348.】
网站上所展示的这些系统计算,没涉及到软件在环,硬件在环仿真。而在 Coptersim 软件里面可以对所要设计的参数进行计算,计算完成后,点击存储并使用参数,就可以根据刚才设计的参数进行软件在环或者硬件在环的实验;也可以在模型参数里对这些参数进行自己的设置,储存后再进行仿真;还可以点击加入模型库将设计好的模型加入到机型数据库后再进行仿真。
2.2 Coptersim平台的仿真功能区
Coptersim平台的仿真功能区是 Coptersim 软件的核心,这个功能区包括以下部分:

(1)本机ID:就是飞机的ID,每个飞机有唯一的ID;
(2)UDP 收端口:主要用于Simulink 或者 Python 等外部程序通过本端口进行数据发送与回传。如:1 号飞机接收的端口是20100,发送的端口是20101,以此类推,这样再多的飞机不会出现数据发送的紊乱。
(3)使用DLL模型文件:就是DLL文件的加载窗口。
(4)仿真模式:这个模式里面可以选择软件在环、硬件在环、加载的DLL文件仿真等模式。
(5)三维显示场景:可以打开Rflysim3D,配合展示效果,在仿真之前,可以设置在哪个地图下进行仿真。
(6) 是否联机的选择框:主要针对在局域网仿真时进行通信,组成分布式仿真的系统。
(7)飞控选择:在插入飞控之后,它会立马识别到端口。
(8)UDP Mode:即 UDP 的模式选择,在集群仿真时,因太大的数据量不利于进行更多集群仿真,所以针对 Mavlink 的数据和UDP的压缩结构体的特点,把仿真的数据量进行了优化处理,具体数据结构体的定义可参考第7讲PPT。
2.3 Coptersim平台的状态显示区

状态显示区:状态显示区左边是进行仿真时的后台运行,数据运行程序,或者 UDP 的通信接口等状态的显示。右边是在进行仿真时飞机的状态量,包括位置、速度等飞机状态量显示。


















 166
166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









