







Q1: 飞机移动的时候,除重力、移动加速度,还有旋转的加速度,姿态估计能通过陀螺仪的数据把移动加速度和转动加速度估计掉吗?
A1: 姿态估计可估计掉其它的加速度。加速度计测量的飞机移动过程中的比力,并不是直接测量的物体的加速度,PX4软件系统中有使用到了扩展卡尔曼滤波器,会通过滤波及其他传感器的数据融合等方式将其它的加速度估计掉。
Q2: 转台的瞬时速率是波动的,应该怎么做才能不让瞬时速率波动影响标定结果呢?
A2: 若能让转台以一定的速度转动,就可避免瞬时速率的波动。
Q3: 什么是静差?
A3: 静差即静态误差。静态误差就是误差不随时间而变化的误差,与其相对的是动态误差,也即误差随时间而变化的误差。
Q4: 控制分配和控制效率能不能举例说下是怎么映射的,建模时一般怎么处理可以比较容易在不同载具间复用?
A4: 具体例程可以看下“[RflySim安装目录]\RflySimAPIs\5.RflySimFlyCtrl\0.ApiExps\第04讲_实验流程介绍.pdf“课件。
Q5: 俯仰角和迎角是一个概念吗?
A5: 不是,俯仰角是机身中轴线与水平线的夹角,迎角是中轴线与气流的相对角度。
Q6: 已经得到了辨识模型,为什么还要得到简化的四旋翼模型呢?
A6:辨识得到的模型具有局限性的,该模型只能在扫频范围内非常准确的;但通过数据公式推导出来的模型,则适用范围更大。
Q7: 转台的瞬时速率是波动的,应该怎么做才能不让瞬时速率波动影响标定结果呢?
A7: 若能让转台以一定的速度转动,就可避免瞬时速率的波动。
Q8: 遥控器输入为什么要归一化呢?
A8: 因为遥控器输出的PWM波并不是严格的1000~2000范围之内的,具体数值可在QGC地面站中的Analyze Tools->MAVLink检测->RC_CHANNELS一栏中查看,归一化后可更加准确给控制器期望信号。
Q9: 如何辨识多输入多输出的状态方程
A9: 具体例程可以看下“[RflySim安装目录]\RflySimAPIs\5.RflySimFlyCtrl\0.ApiExps\第04讲_实验流程介绍.pdf“课件。
Q10: 在进行系统辨识的时候,应该如何进行真机实飞,都需要采集哪些数据?
A10: 系统辨识是一种通过输入输出数据来估计系统动态行为的方法。具体采集的数据需要根据你的个人需求而定,通常包含有:飞行参数中的飞行速度、高度、姿态角(俯仰角、横滚角、偏航角)等;控制输入中的油门位置、操纵面偏转角度等;传感器数据中可能包括GPS数据、气压高度计数据、惯性测量单元(IMU)数据以及系统响应中的系统实际输出,如加速度、角速度等等。
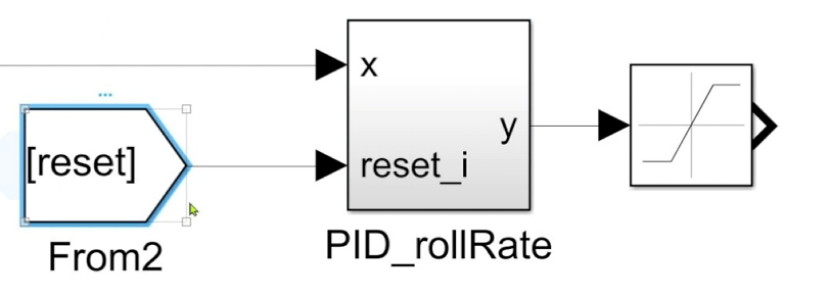
Q11: 控制器输出为升力和扭距,内部包含一些积分项,请问硬件在环仿真大概应该如何设置,比如数值重置之类?
A11: RflySim工具链中的Simulink控制器模型中,有涉及到积分项的模块均作为数值重置的设置,具体可查看“[RflySim安装目录]\RflySimAPIs\5.RflySimFlyCtrl\*”章节中的相关控制器模型,如下图所示。
Q12: 带轮子的两栖无人机,这样得出的数据也能进行模型辨识得出准确模型吗?
A6:可以。模型方面,两栖无人机也就意味着有6个输入信号,须注意进行修改;控制器方面,也需要同时设计出两轮的控制器和一个旋翼机的控制。最后,进行正常的系统辨识即可。
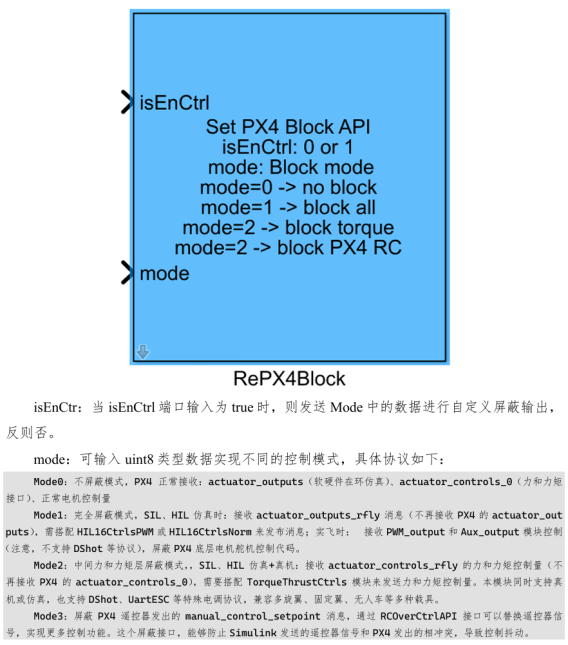
Q13: 硬件在环具体应该如何首先使用px4原生控制器起飞,再切换到自己的控制器?
A13: 具体可以看下:[RflySim安装目录]/RflySimAPIs/5.RflySimFlyCtrl/API.pdf文件中的2.4.12小节内容,该小节中介绍的模块可实现在线屏蔽PX4输出的,该控制切换功能,是一键安装脚本在部署固件时,自动新增的接口,具体可见下图。
Q14: 请问要改成自己模型,只需要修改生成力与力矩的模块吗?怎么将飞控的pwm油门信号给simulink 受力模型,如何通信的?
A14: 改成自己Simulink模型后,无需要修改生成力与力矩的模块;飞控的pwm油门信号直接发送到Simulink中的pwm_out模块(不支持Dshot模式)即可,另外,也可以通过在Simulink中搭建控制分配器,将PWM计算分配为控制信号,发送到力和力矩控制信号模块即可。
Q15: 我的四旋翼机架较大,真机扫频比较难实现,机架刚度不好(比较难解决),可能不满足刚性假设下的四旋翼机模型,怎么处理好?
A15: 可以看下Simulink中的Custom Variable Mass 6DOF模块,用户可自定义设置无人机的质量损失流速和模型中的惯性加速度来定义此类四旋翼动力学模型,具体可见:https://www.mathworks.com/help/aeroblks/customvariablemass6dofquaternion.html
















 133
133

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









