







ROS系统试用练习(二)
上一个博客里说了,ROS的系统导览、创建工作空间、创建ROS功能包和ROS综合功能包和编译ROS功能包
使用ROS节点
节点都是可执行程序,这些可执行文件位于开发空间中(devel)
如果使用apt-get 安装ROS ,那么已经有turtlesim,如果还没有,可以使用:
sudo apt-get install ros-indigo-ros-tutorials
当然如果你不确定自己是否安装了turtlesim的话,可以使用:
rospack find turtlesim
如果安装过,你将看到:
/opt/ros/indigo/share/turtlesim
在开始之前,必须使用roscore命令来启动
为了获得节点信息,可以使用rosnode工具。
你将看到
rosnode is a command-line tool for printing information about ROS Nodes.
Commands:
rosnode ping test connectivity to node
rosnode list list active nodes #查看正在运行的节点信息
rosnode info print information about node #查看详细信息
rosnode machine list nodes running on a particular machine or list machines
rosnode kill kill a running node
rosnode cleanup purge registration information of unreachable nodes
Type rosnode <command> -h for more detailed usage, e.g. 'rosnode ping -h'
此时如果使用rosnode list 命令 ,你将会看到:
/rosout
这是很正常的,因为这个节点总是随着roscore运行的,
现在我们要使用rosrun命令来启动一个新的节点
rosrun [package_name] [node_name]
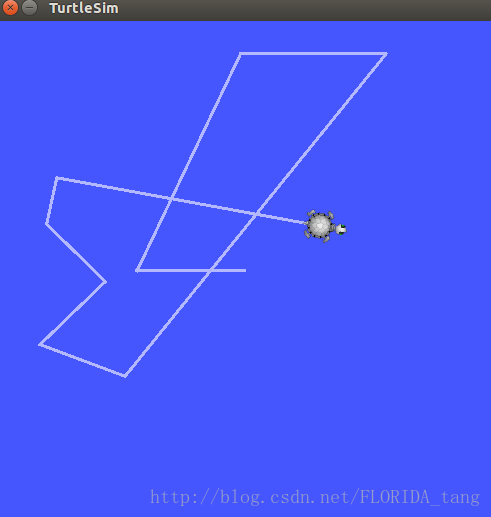
rosrun turtlesim turtlesim_node
看到小乌龟了吗?

这时候再去查看节点列表,会看到出现一个新的节点
$ rosnode list #有两个节点在运行
/rosout
/turtlesim查看信息
rosnode info /turtlesim
--------------------------------------------------------------------------------
Node [/turtlesim]
Publications:
* /turtle1/color_sensor [turtlesim/Color]
* /rosout [rosgraph_msgs/Log]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [unknown type]
Services:
* /turtle1/teleport_absolute
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
* /reset
* /spawn
* /clear
* /turtle1/set_pen
* /turtle1/teleport_relative
* /kill
contacting node http://127.0.0.1:40682/ ...
Pid: 27629
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS可以看到,Publications、Subscriptions、Services及他们各自唯一的名称
rqt_graph能够创建一个显示当前系统运行情况的动态图形。rqt_graph是rqt程序包中的一部分。如果你没有安装,请通过以下命令来安装:
$ sudo apt-get install ros-indigo-rqt
$ sudo apt-get install ros-indigo-rqt-common-plugins
#运行rqt_graph
rosrun rqt_graph rqt_graph #运行rqt_graph包下面的rqt_graph节点
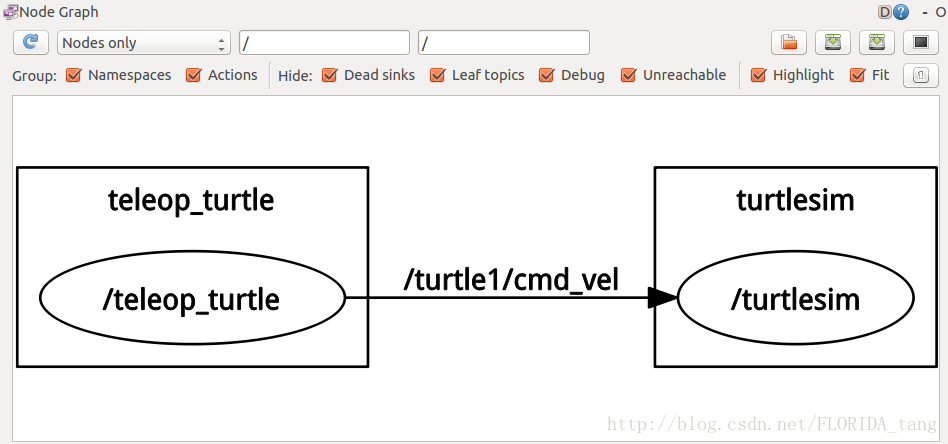
如果你将鼠标放在/turtle1/cdm_vel上方,相应的ROS节点(蓝色和绿色)和话题(红色)就会高亮显示。正如你所看到的,turtlesim_node和turtle_teleop_key()节点正通过一个名为 /turtle1/command_velocity的话题来互相通信。
## 如何使用主题于节点交互 ##
要进行交互并获得主题的信息,可以使用rostopic工具,此工具接受以下参数:
rostopic bw display bandwidth used by topic
rostopic delay display delay for topic which has header
rostopic echo print messages to screen #把消息输出到屏幕山
rostopic find find topics by type #按照类型查找
rostopic hz display publishing rate of topic #显示主题的发布频率
rostopic info print information about active topic #列出活动主题的信息
rostopic list print information about active topics #列出活动主题
rostopic pub publish data to topic #将数据发布到主题
rostopic type print topic type #输出主题的类型
如果想要查看这些参数的详细信息,可以使用rostopic bw -h
移动小海龟
rosrun turtlesim turtle_teleop_key
这时候再去查看节点
rosnodelist/rosout/teleopturtle/turtlesim
rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
通过echo可以查看节点发出的信息,运行rostopic echo /turtle1/cmd_vel 并使用箭头查看消息产生时发送了哪些数据。$ rostopic echo /turtle1/cmd_vel
linear:
x: -2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
当查看完消息后,再去看rqt_graph就会看到。

现在让我们再看一下rqt_graph(你可能需要刷新一下ROS graph)。正如你所看到的,rostopic echo现在也订阅了turtle1/cmd_vel话题。
这时候相当于在功能包turtkesim下面的turtlesim节点订阅了来自teleop_turtle功能包下面的teleop_turtle节点的turtle1/cmd_vel话题,同样,rostoipic echo 节点也订阅了turtle/cmd_vel话题。
- 查看主题发送的消息类型
话题之间的通信是通过在节点之间发送ROS消息实现的。对于发布器(turtle_teleop_key)和订阅器(turtulesim_node)之间的通信,发布器和订阅器之间必须发送和接收相同类型的消息。这意味着话题的类型是由发布在它上面的消息类型决定的。使用rostopic type命令可以查看发布在某个话题上的消息类型。
$ rostopic type /turtle1/cmd_vel
geometry_msgs/Twist如果想要看到消息字段,可以使用如下指令:
$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z现在我们已经知道了turtlesim节点所期望的消息类型,接下来我们就可以给turtle发布命令了。这个指令非常有用,因为我们可以通过这些工具使用rostopic pub [topic] [msg_type] [args]命令直接发布出去。
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
以上命令会发送一条消息给turtlesim,告诉它以2.0大小的线速度和1.8大小的角速度开始移动。

这是一个非常复杂的例子,因此让我们来详细分析一下其中的每一个参数。
rostopic pub
这条命令将会发布消息到某个给定的话题。
-1
(单个破折号)这个参数选项使rostopic发布一条消息后马上退出。
/turtle1/cmd_vel
这是消息所发布到的话题名称。
geometry_msgs/Twist
这是所发布消息的类型
--
(双破折号)这会告诉命令选项解析器接下来的参数部分都不是命令选项。这在参数里面包含有破折号-(比如负号)时是必须要添加的。
2.0 1.8
正如之前提到的,在一个turtlesim/Velocity消息里面包含有两个浮点型元素:linear和angular。在本例中,2.0是linear的值,1.8是angular的值。
你可能已经注意到turtle已经停止移动了。这是因为turtle需要一个稳定的频率为1Hz的命令流来保持移动状态。我们可以使用rostopic pub -r命令来发布一个稳定的命令流:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
这条命令以1Hz的频率发布速度命令到速度话题上。

小乌龟自己转圈了
这时候我们再来刷新一下rqt_graph

可以看到rostopic发布器节点(左下)正在与rostopic echo节点(右上)进行通信
rostopic hz命令可以用来查看数据发布的频率。
用法:
rostopic hz [topic]
我们看一下turtlesim_node发布/turtle/pose时有多快:
- 使用 rqt_plot
参考资料:
http://wiki.ros.org/cn/ROS/Tutorials/UnderstandingTopics















 209
209

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









