






 本文介绍了利用龙伯格观测器的电机控制方案,采用全C代码在DSP28335平台上实现,涉及参数建模、控制环节离散化、功能模块如电压采样和控制算法,具有高稳定性和可移植性。
本文介绍了利用龙伯格观测器的电机控制方案,采用全C代码在DSP28335平台上实现,涉及参数建模、控制环节离散化、功能模块如电压采样和控制算法,具有高稳定性和可移植性。
电机控制 龙伯格观测器 永磁同步电机无传感器控制 全C代码程序 成熟产品方案 DSP28335
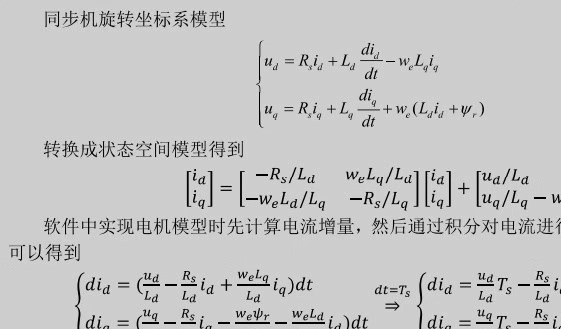
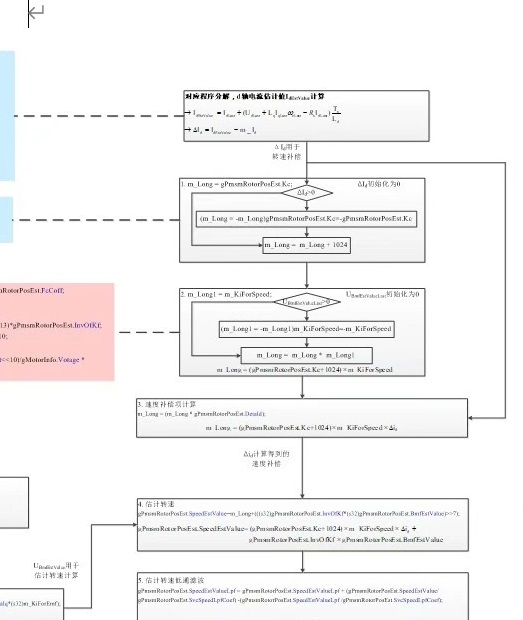
(1)全C程序完成由电机参数、电流微分方程构建dq轴误差模型、控制参数逻辑变换、低通滤波器转速滤波和转子角度积分等控制环节离散化;
(2)成熟应用方案,永磁同步电机Foc磁场定向控制算法程序框架,包含基础电压、电流采样、Clarke、Park、iPark、Svpwm、死区补偿等;
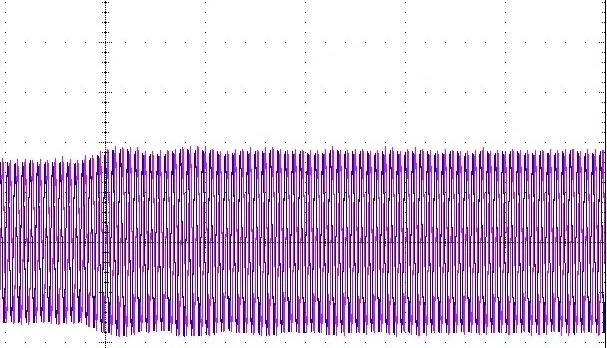
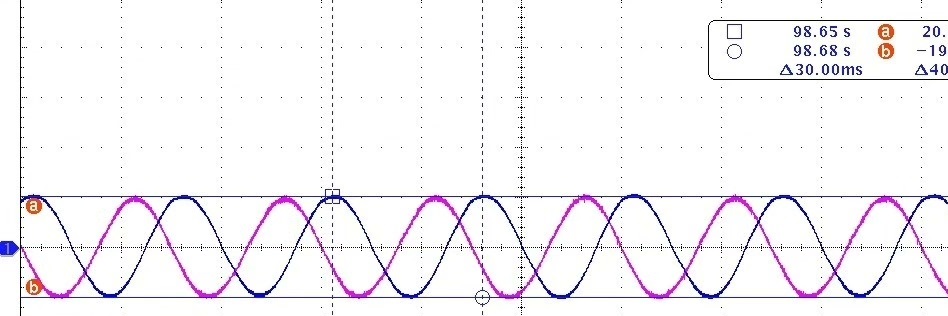
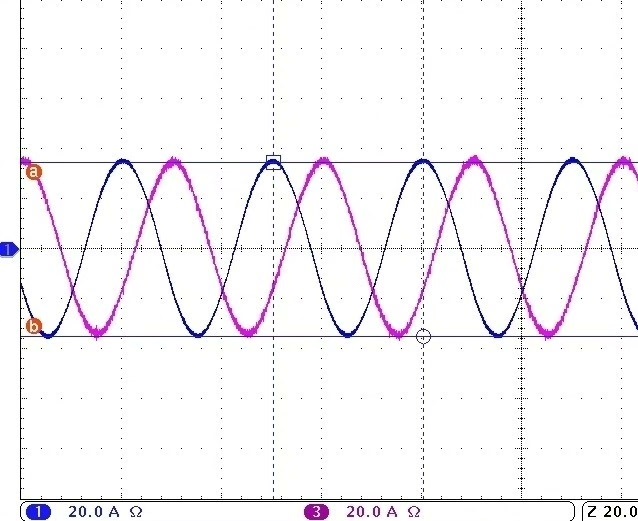
(3)全速段可以稳定运行,下图为加100%额定载荷对应的电流波形、动态过程电流波形、算法程序框架图和相关解析文档;
(4)DSP28335平台验证通过,成熟应用方案,包含Adc、EPwm、EINT外部中断、Can通信、Sci通信、Spi通信、定时器等配置,另包含Ad2S1210旋变解码读取角度、计算转速等C语言程序;
(5)程序代码较多采用结构体、指针,尽量避免了全局变量的使用,状态机程序架构清晰、可维护性很强,可直接粘贴到你现有DSP、ARM等测试环境的程序框架中,快速实现和测试应用;
ID:681599702440489673
只有科技没狠活
电机控制是现代工业领域中的一个重要技术,而龙伯格观测器是电机控制领域的一种常用的观测器算法。本文将围绕着电机控制和龙伯格观测器展开讨论,重点介绍一种基于永磁同步电机无传感器控制的成熟产品方案,该方案采用全C代码程序实现,并在DSP28335平台上进行了验证。
首先,我们将介绍该方案的控制算法。全C程序完成了电机参数和电流微分方程的建模,并构建了dq轴误差模型,实现了控制参数逻辑变换、低通滤波器转速滤波以及转子角度积分等控制环节的离散化。通过这些环节的精确控制,可以实现对永磁同步电机的精准控制。
其次,我们将介绍成熟应用方案中包含的主要功能和算法。该方案采用了永磁同步电机Foc磁场定向控制算法,并提供了包括基础电压、电流采样、Clarke、Park、iPark、Svpwm和死区补偿等功能。这些功能的实现,为永磁同步电机的控制提供了强有力的支持。
第三,我们将介绍该方案的性能和可靠性。在全速段下,该方案可以稳定运行,并且能够应对100%额定载荷情况下的复杂工作环境。同时,我们还提供了加100%额定载荷对应的电流波形和动态过程电流波形,以及该方案的算法程序框架图和相关解析文档。这些数据和文档的提供,可以让用户对该方案的性能和可靠性有更直观的了解。
第四,我们将介绍该方案在DSP28335平台上的验证情况。该平台是一个成熟的测试环境,具备Adc、EPwm、EINT外部中断、Can通信、Sci通信、Spi通信、定时器等配置。此外,我们还提供了一个Ad2S1210旋变解码读取角度和计算转速的C语言程序。这些程序的提供,为用户在仿真环境中验证和测试该方案提供了便利。
最后,我们将介绍该方案的代码结构和架构。该方案的程序代码采用了结构体和指针的方式,尽量避免了全局变量的使用。同时,该方案采用了状态机程序架构,使得代码结构清晰,可维护性很强。用户可以直接将该程序框架粘贴到现有的DSP、ARM等测试环境中,快速实现和测试应用。
综上所述,该成熟应用方案基于全C代码程序实现了永磁同步电机的无传感器控制。该方案在DSP28335平台上经过了验证,并具备了较高的性能和可靠性。通过该方案,用户可以快速实现对永磁同步电机的精准控制,并在实际工业生产中得到应用。
【相关代码 程序地址】: http://nodep.cn/702440489673.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









