






 文章介绍了使用MatlabR2018aSimulink搭建的感应电机矢量控制调速系统仿真模型,具备PI参数自整定功能,能快速响应并精确控制电机。仿真展示了转速、电流和励磁响应波形,节省了调试时间。
文章介绍了使用MatlabR2018aSimulink搭建的感应电机矢量控制调速系统仿真模型,具备PI参数自整定功能,能快速响应并精确控制电机。仿真展示了转速、电流和励磁响应波形,节省了调试时间。
感应电机矢量控制调速仿真PI参数自整定 Matlab Simulink仿真模型
1.模型简介
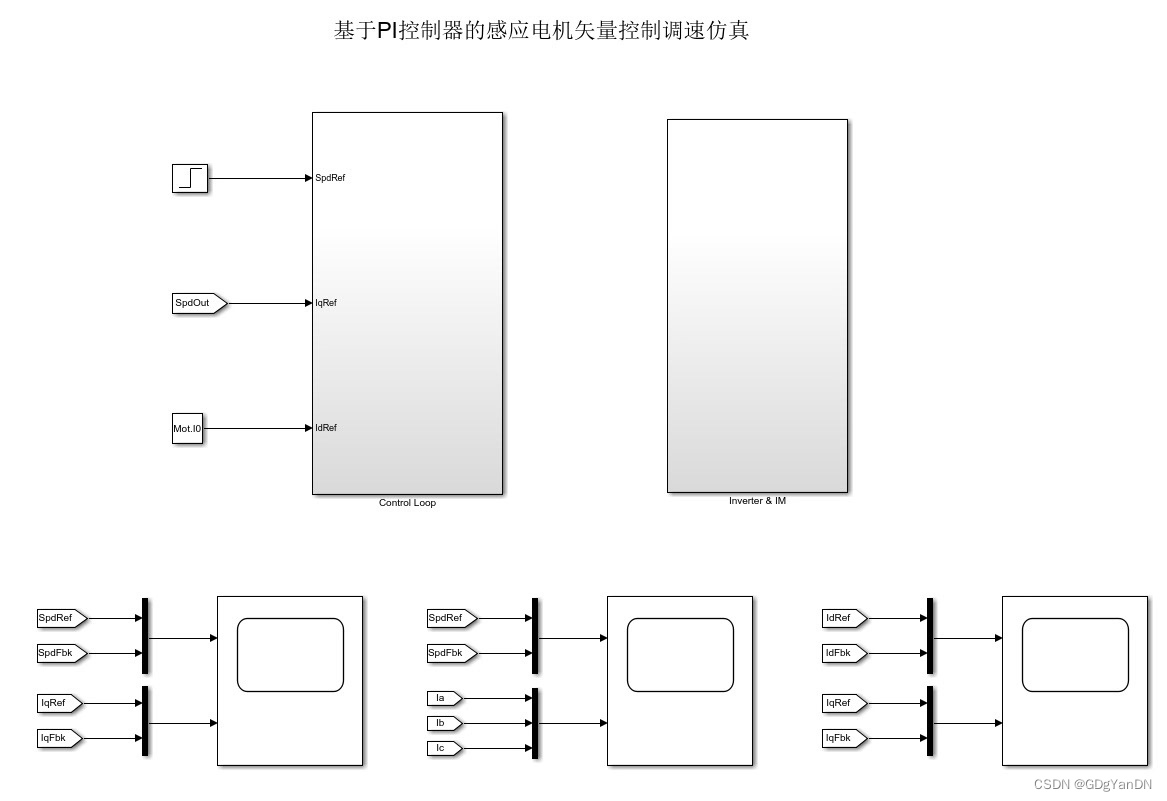
模型为感应(异步)电机矢量控制调速系统仿真,采用Matlab R2018a Simulink搭建。
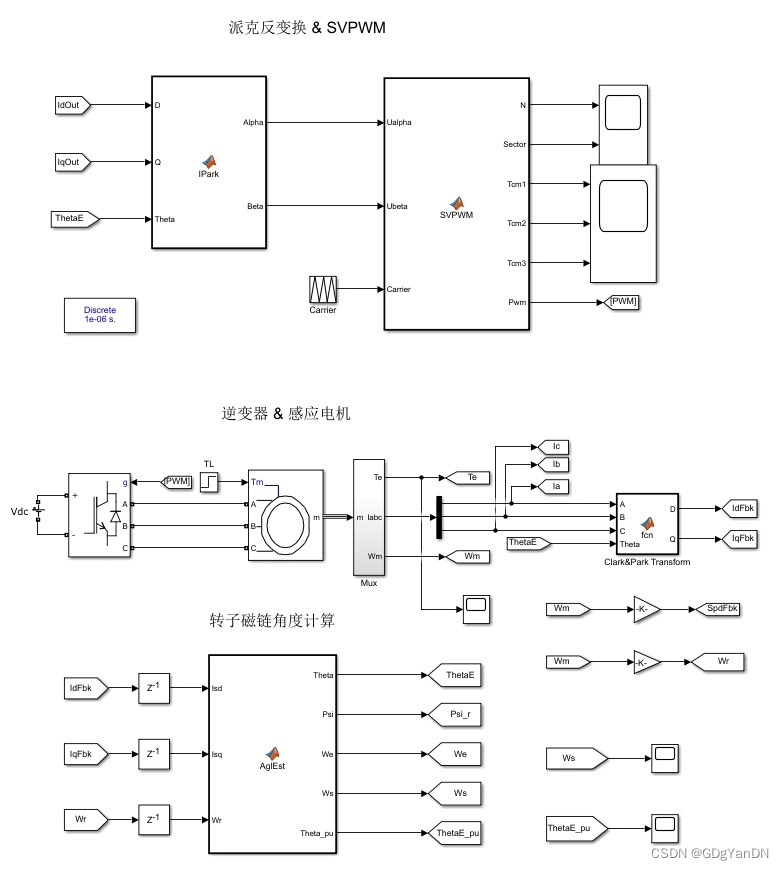
模型内主要包含DC直流电压源、三相逆变器、感应(异步)电机、采样模块、SVPWM、Clark、Park、Ipark、PID、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、PID模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。
模型均采用离散化仿真,其效果更接近实际数字控制系统。
2.算法简介
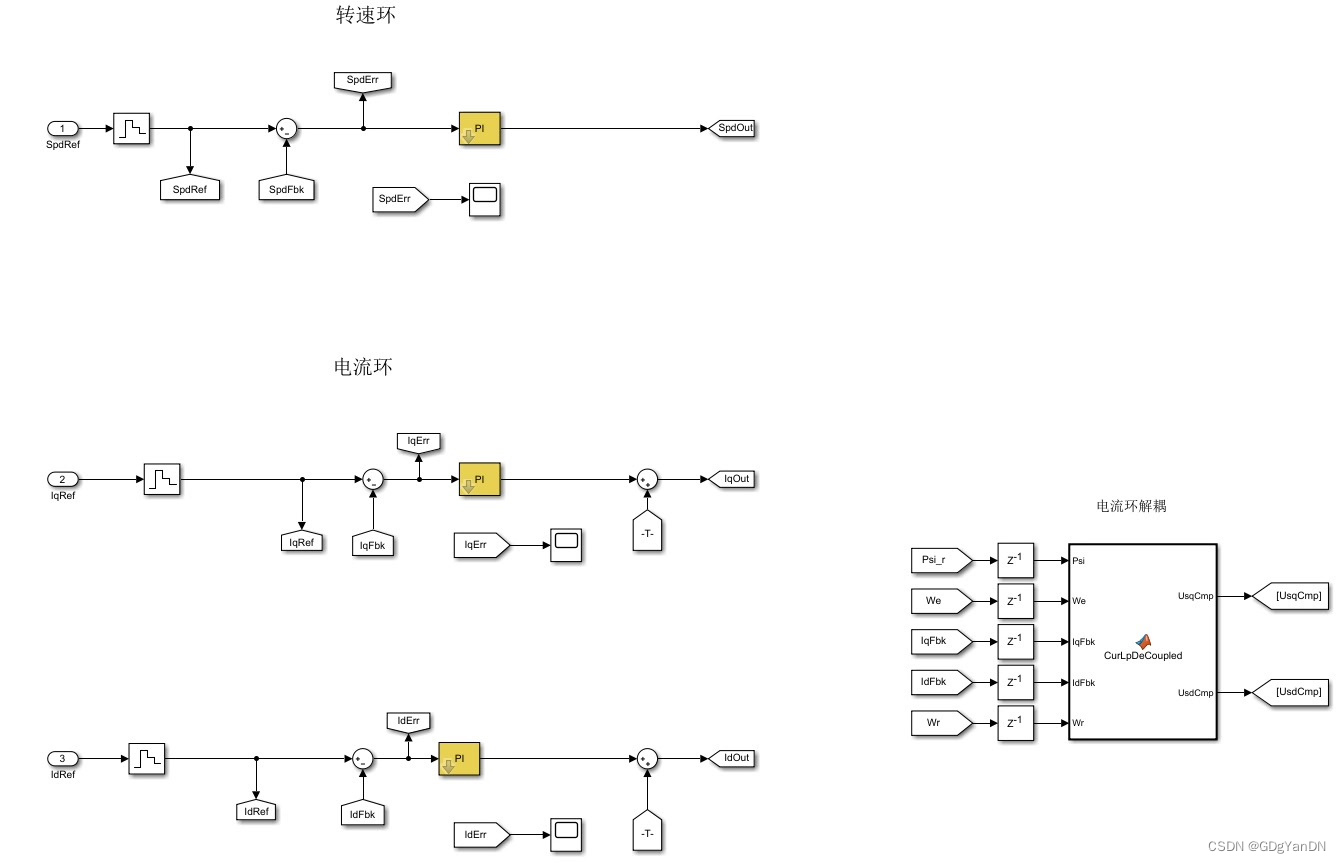
矢量控制调速系统由速度环、电流环双环结构构成,其中,电流环采用PI控制,并具有电流环解耦功能;转速环采用抗积分饱和PI控制。
本仿真中最大的亮点是双环PI参数自整定,只需输入正确的电机参数(电阻、电感、转动惯量等参数),无需手动调节PI参数,并且抗饱和PID中的系数也可自整定,能够节省调试时间。
3.仿真效果
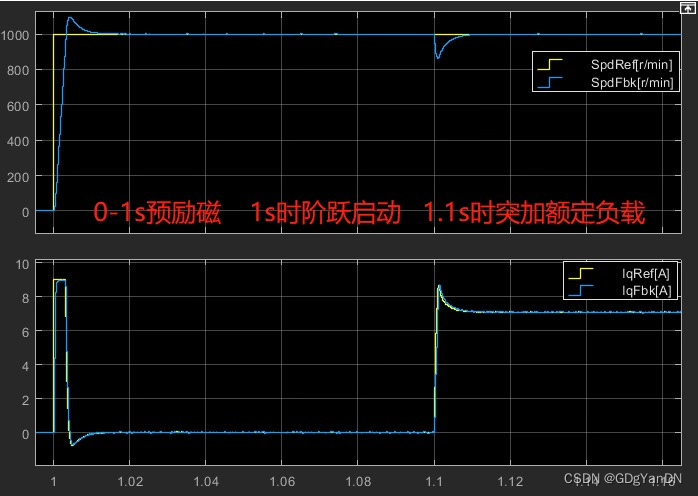
1 转速响应与转矩电流Iq响应波形,如下图1所示。
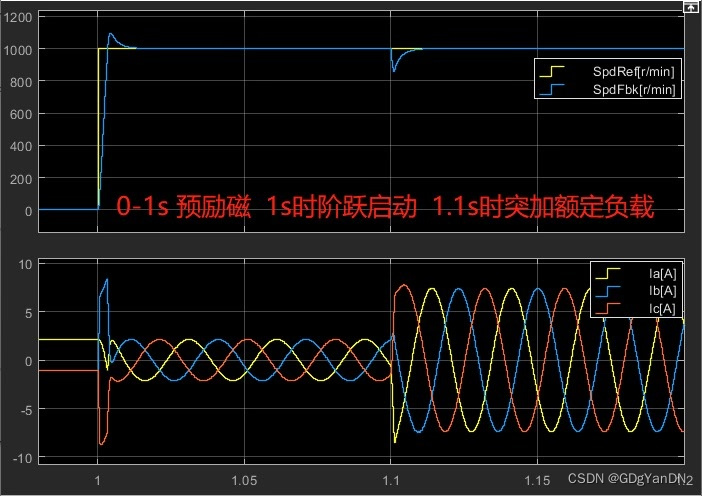
2 转速响应与三相电流波形,如下图2所示。
3 励磁电流Id与转矩电流Iq响应波形,如下图3所示。
4.
可提供模型内相关算法的参考文献

感应电机矢量控制调速仿真PI参数自整定 Matlab Simulink仿真模型
模型简介 感应电机矢量控制调速系统是一种常用的电机控制方法,通过准确控制电机的电流和转矩来实现电机的精确运动控制。本文介绍了一种基于 Matlab R2018a Simulink的仿真模型,用于模拟感应电机矢量控制调速系统的工作原理及其性能。
感应电机矢量控制调速系统仿真模型主要由以下几个部分组成:DC直流电压源、三相逆变器、感应电机、采样模块、SVPWM、Clark、Park、Ipark、PID、速度环和电流环等模块。其中,SVPWM、Clark、Park、Ipark和PID模块采用 Matlab function 进行编写,这种编写方式与 C 语言编程比较接近,方便进行实物移植。整个模型采用离散化仿真,使得仿真结果更加接近实际数字控制系统的运行效果。
算法简介 感应电机矢量控制调速系统的核心是速度环和电流环的双环结构。其中,电流环采用 PI 控制,并具有电流环解耦功能;转速环采用抗积分饱和 PI 控制。本文仿真模型的最大亮点是双环 PI 参数的自整定功能,只需输入正确的电机参数(如电阻、电感、转动惯量等),无需手动调节 PI 参数,并且抗饱和 PID 中的系数也可以自动调整,从而节省了调试时间。
仿真效果 本文的仿真模型通过对感应电机矢量控制调速系统进行仿真,得到了以下仿真效果:
-
转速响应与转矩电流 Iq 响应波形,如图1所示。通过仿真结果可以看出,系统能够快速响应转速指令,并且转矩电流 Iq 的响应稳定。
-
转速响应与三相电流波形,如图2所示。通过仿真结果可以观察到,系统的转速响应与三相电流波形之间存在着一定的相互关系,转速的变化会对三相电流产生影响。
-
励磁电流 Id 与转矩电流 Iq 响应波形,如图3所示。通过仿真结果可以看出,系统的励磁电流 Id 和转矩电流 Iq 响应波形之间存在一定的耦合关系,Id 的变化会对 Iq 的响应产生影响。
结论 本文介绍了一种基于 Matlab R2018a Simulink 的感应电机矢量控制调速系统仿真模型。通过该模型的仿真,可以全面了解感应电机矢量控制调速系统的工作原理和性能。同时,该仿真模型具有自动调整 PI 参数的功能,能够节省调试时间。在实际应用中,可以根据具体需求进行调整和优化。
相关代码,程序地址:http://lanzouw.top/704223359673.html


















 767
767

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









