






鼠笼式三相交流异步电动机矢量控制变频调速系统的MATLAB建模与仿真
本文研究交流异步电动机矢量控制变频调速系统的建模与仿真。利用 MATLAB/SIMULINK 中的电气系统模块(Power System Blocksets )构建异步电机矢量控制仿真模型,并对其动态性能进行仿真实验。
1. 绪论
2. 异步电机的数学模型及坐标变换
3. 异步电机矢量控制原理
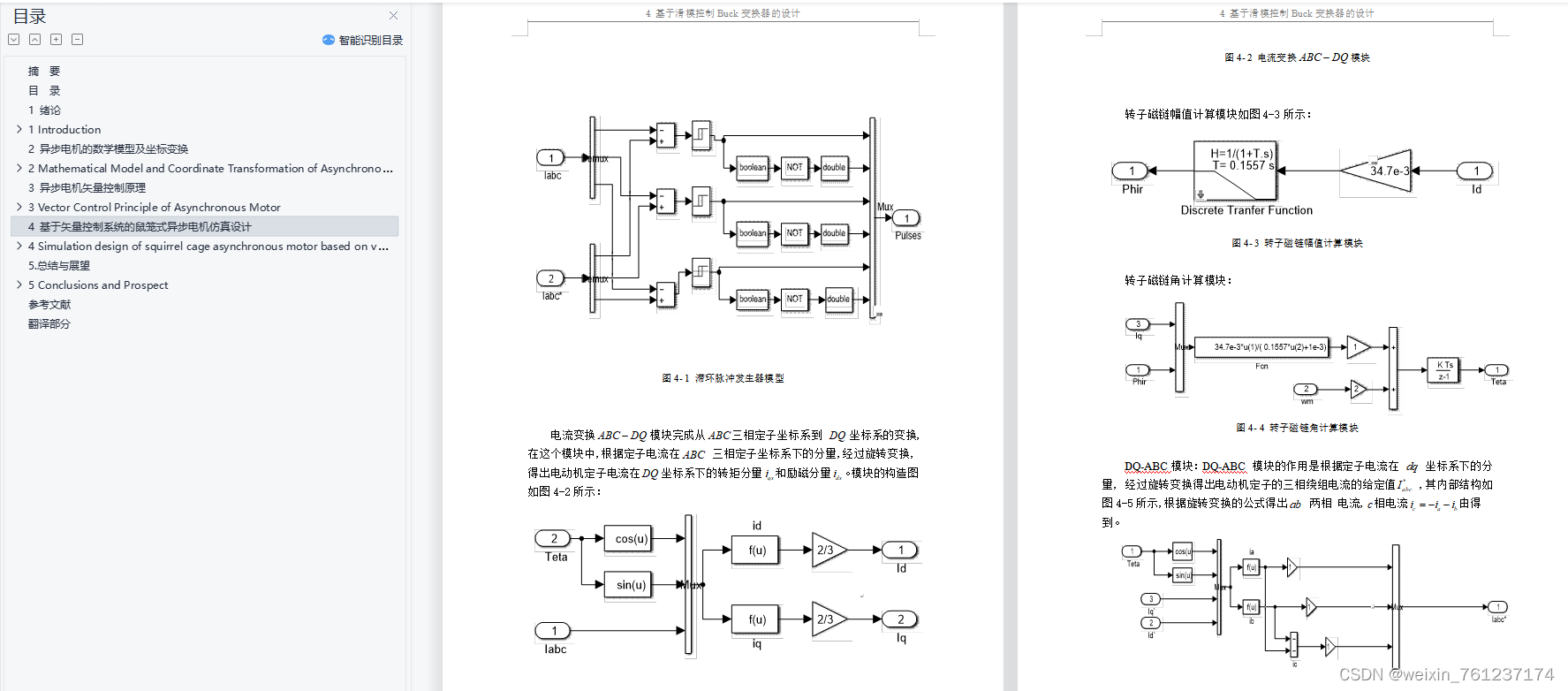
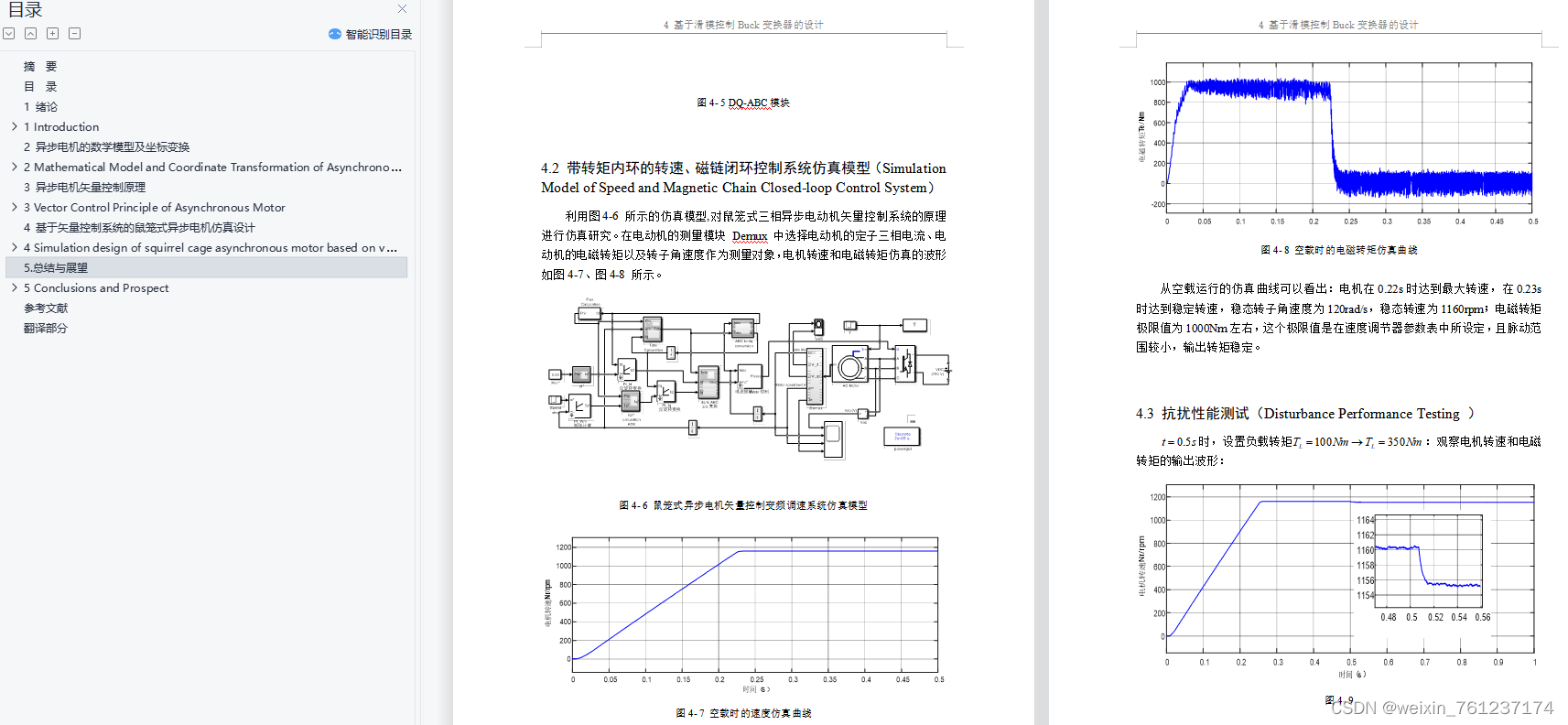
4. 基于矢量控制系统的鼠笼式异步电机仿真设计
5. 总结
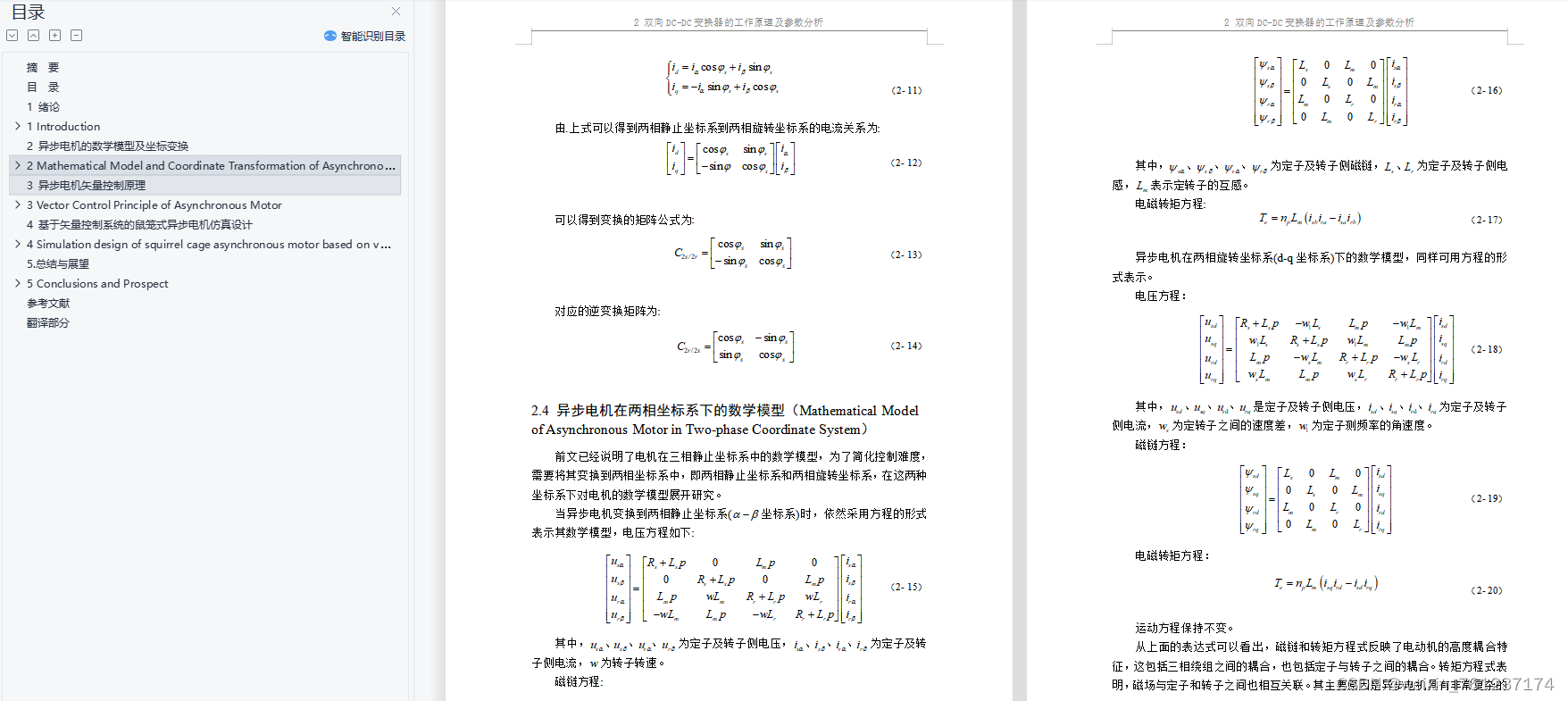
本文在查阅了大量的国内外关于异步电机的研究、矢量控制理论的文献,对异步电机的坐标变换过程进行了推导,建立了异步电机的数学动态模型,对三相静止坐标系和两相静止坐标系的关系和转换方式进行阐述,推导出正交坐标系下的状态方程和数学模型。
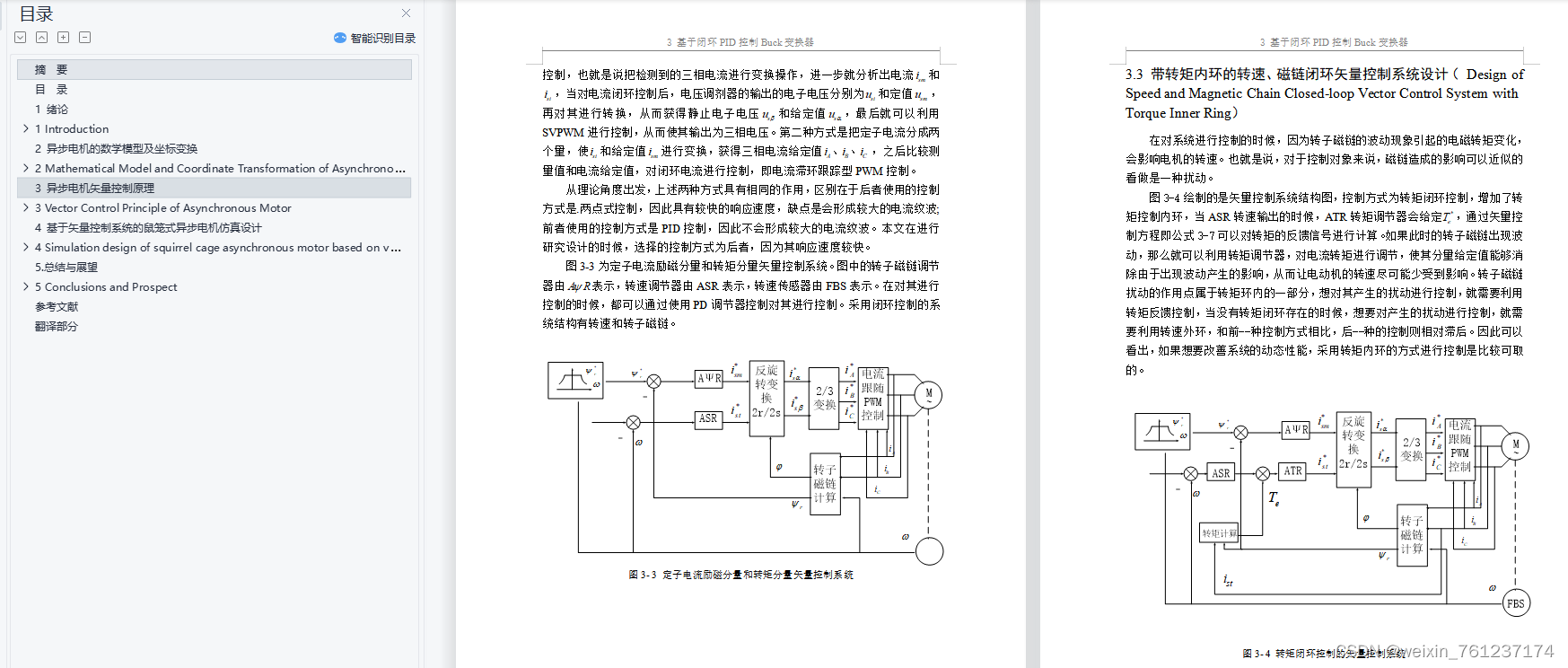
对异步电机的矢量控制理论进行了阐述,分别建立了转速、磁链闭环控制的结构框图,和带转矩内环的转速、磁链闭环控制系统框图,为后续仿真的搭建提供了理论基础。在MATLAB/Simulink中的电气系统模块(power system blockset )构建动态矢量仿真系统,对鼠笼式异步电机的矢量控制系统进行了仿真设计,在空载和负载条件下对电机的输出性能进行评估,经测试,鼠笼式异步电机的矢量控制系统具备稳定的输出性能和良好的抵抗负载扰动的特性,具有实用价值。
















 545
545











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











