






目录
1. 简介
2. 数学模型和等效电路
3. 基于等效电路的simulink/ Power System 仿真模型
4. 仿真实例
5 结论
6 参考资料
1. 简介
电机的仿真模型多种多样,这里介绍一种全新的仿真模型—基于完全等效电路的双绕组单相电容异步电动机的simulink仿真模型,以下可以看到,这样的仿真模型易于建立且不容易出错,可以方便地模拟单相电容异步电动机的瞬态性能,也值得推广应用到电机控制系统和电力系统(作为元件)的仿真中去。
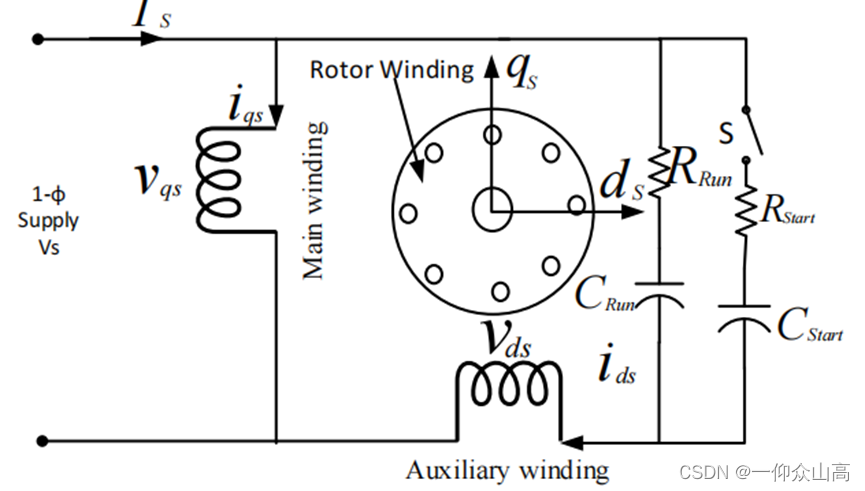
图1 双绕组单相电容感应电动机示意图
2. 数学模型和等效电路
图1为双绕组单相电容感应电动机示意图,定子上有两个在空间相差90˚ 电角度的绕组:一个称为工作绕组或主绕组(Main winding),一个称为辅助绕组(Auxiliary winding)或副绕组。q绕组和d绕组分别为q轴上和d轴上的等效绕组。RStart和Cstart为起动电容器的电阻和电容,RRun和CRun为运行电容器的电阻和电容。对于图1所示电路,按照电动机惯例,根据KVL,有
定子和转子的电压方程为:
(1)(2)
(3) (4)
定子和转子的磁链方程为
这里,
电磁转矩方程,应用虚拟位移原理可得
(9)
机械运动方程
(10)
以上方程中的符号说明:
:d-q轴绕组的定子电压;
:d-q轴绕组的定子电流;
:d-q轴绕组的转子磁链;
: 转子电角速度;
: 转子的机械角速度
a:副绕组与主绕组的匝数Ras:主绕组定子电阻;
Ras:主绕组定子漏感;
Las:折算到主绕组转子电阻;
:折算到主绕组转子漏感;
:主绕组的磁化电感;
Rbs:副绕组定子电阻;
:副绕组定子漏感;
:折算到定子副绕组的转子电阻;
:折算到定子副绕组的转子漏感;
:副绕组的磁化电感
由上述电压方程和磁链方程可以得到双绕组单相感应电动机的等效电路:
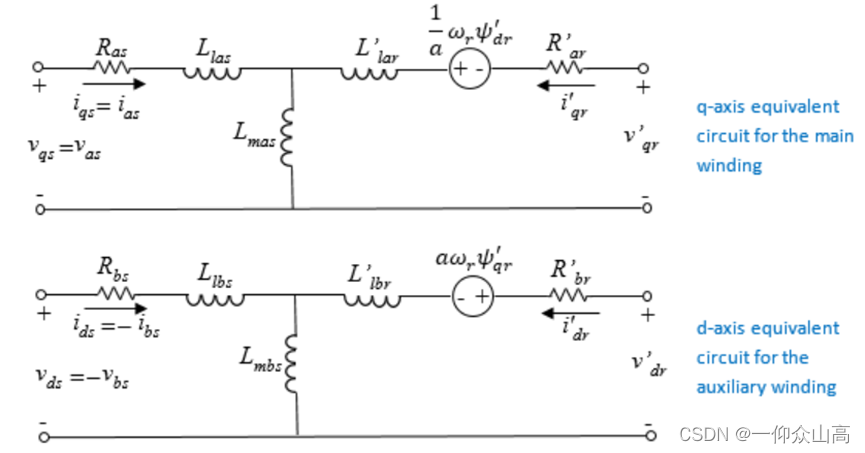
图2. 单相电容感应电动机的q轴和d轴等效电路
对于电容器起动-电容器运行的双绕组单相感应电动机,其电路图如图3所示。起动时,开关S闭合,起动电容器与运行电容器并联,当转速达到额定转速的(70~80%时,开关S打开,切除起动电容器,运行电容器仍保留在电路中。
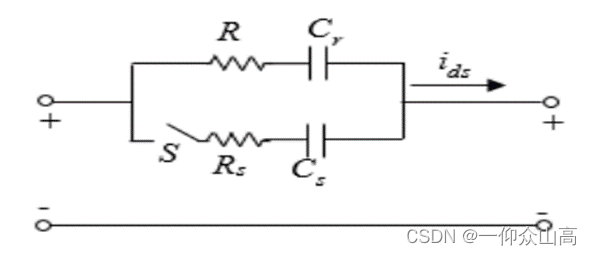
图3 起动电容器和运行电容器的连接图
(11)
断开起动电容器后的d轴电压为
(12)
3. 基于全等效电路的仿真模型
根据双绕组单相异步电动机的等效电路(图2)和电容器连接电路(图3)以及根据机电类比原理得到的机械运动系统(方程10)对应的等效电路(见前文:电机的Matlab/Simulink建模方法),容易得到基于全等效电路的双绕组单相电容异步电动机的仿真模型,见图4~图8。从图5可以看到,基于全等效电路的双绕组单相电容异步电动机的仿真模型由三个部分所组成:(1)根据Power System库中的电路元件搭建的描述电机电磁特性的等效电路(图2)和电容器电路(图3)的仿真模型;(2)电磁转矩模块(此时电磁转旧相当于一个传感器);(3)机械运动方程的电路模块。可以看出,所建立的仿真模型是由一个独立电压源和三个受控电压源加上一些电阻电感和电容元件所组成的全电路模型。
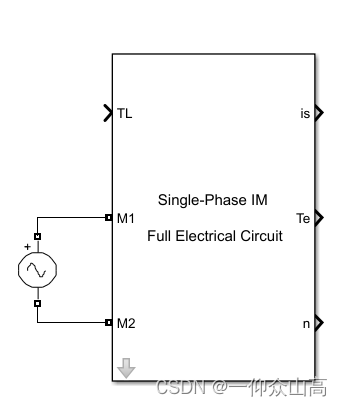
图4 双绕组单相电容异步电动机仿真模型的封装形式
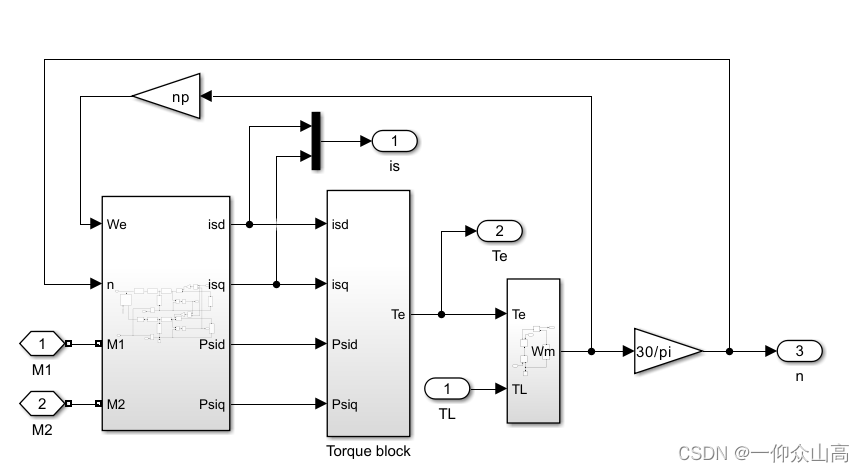
图5 图4所示“Single-phase IM Full Electrical Circuit”仿真模型的内部情形
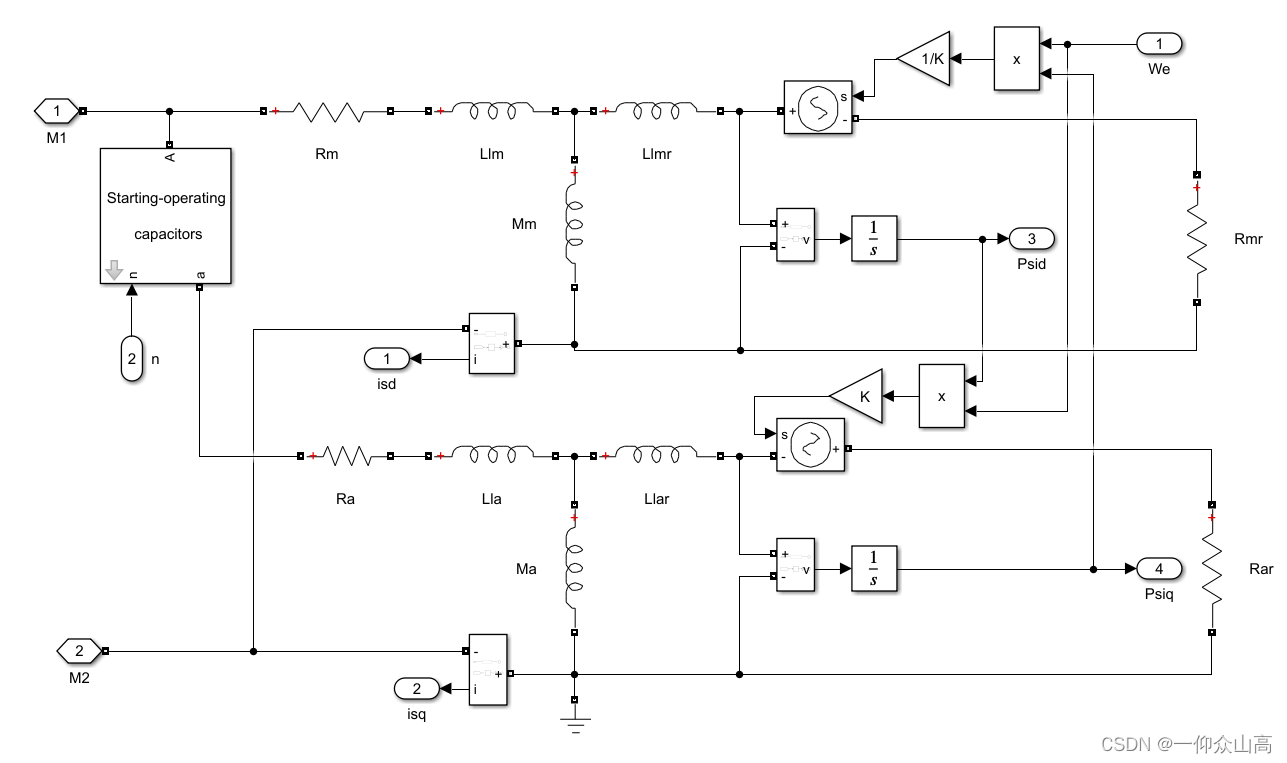
图6 基于等效电路和电容器连接电路的仿真模型
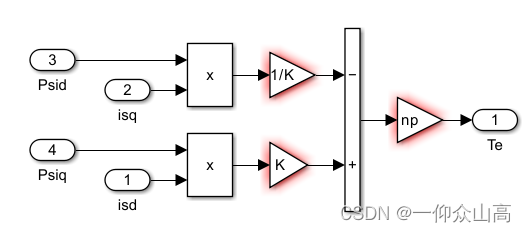
图7 电磁转矩模块的内部情况
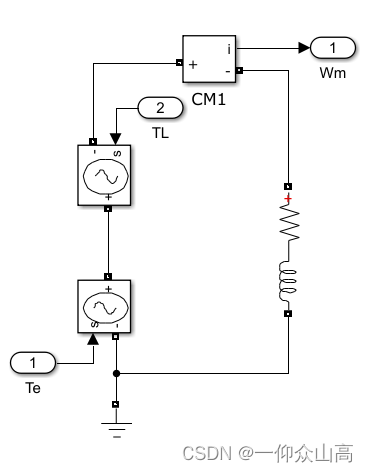
图8 机械运动方程模块的电路模型
4. 仿真实例
对双绕组单相电容异步电动机的起动过程进行仿真。仿真用的单相异步电动机参数见表1。设单相电源电源负载转矩TL随时间变化t=[0 1 1.5 2 2 3],TL=[0 0 1 1 2 2] 。先将起动电容器和运行电容器并联再并联到副绕组两端, 再把定子绕组主绕组接入单相电源, 使电动机起动。当电机转子转速达到同步速的75% 时将起动电容器用离心开关切除, 同时将运行电容器仍保留再副绕组的电路中。仿真结果如图9-图12所示。经与Matlab自带的仿真模型比较,仿真结果一致,所建立的仿真模型是正确的。
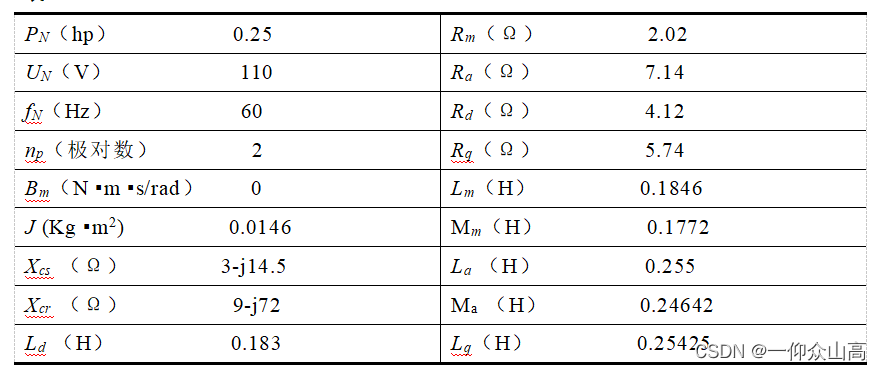
表1 双绕组单相电容异步电动机参数
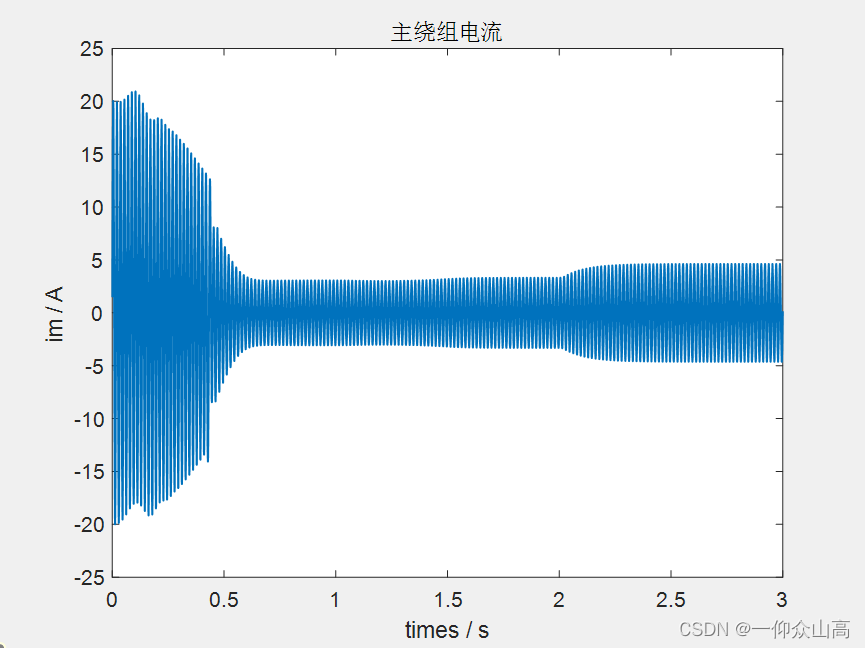
图9 主绕组电流随时间变化曲线
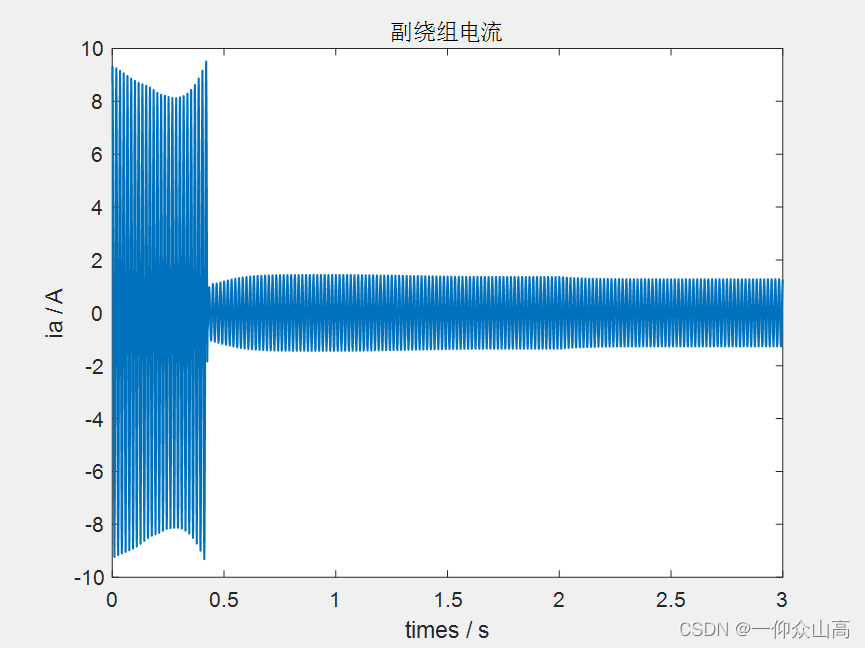
图10 副绕组电流随时间变化曲线
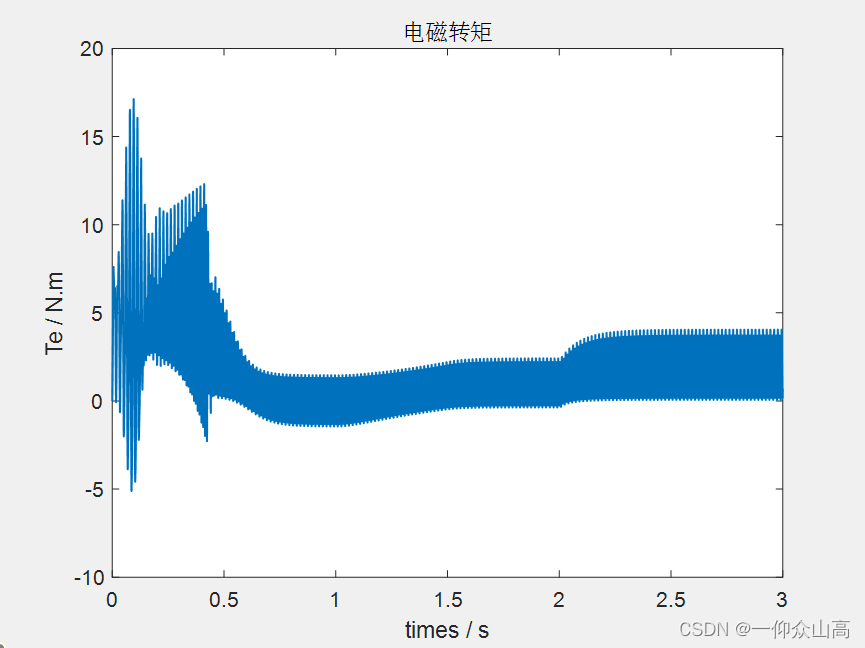
图11 电磁转矩随时间变化曲线
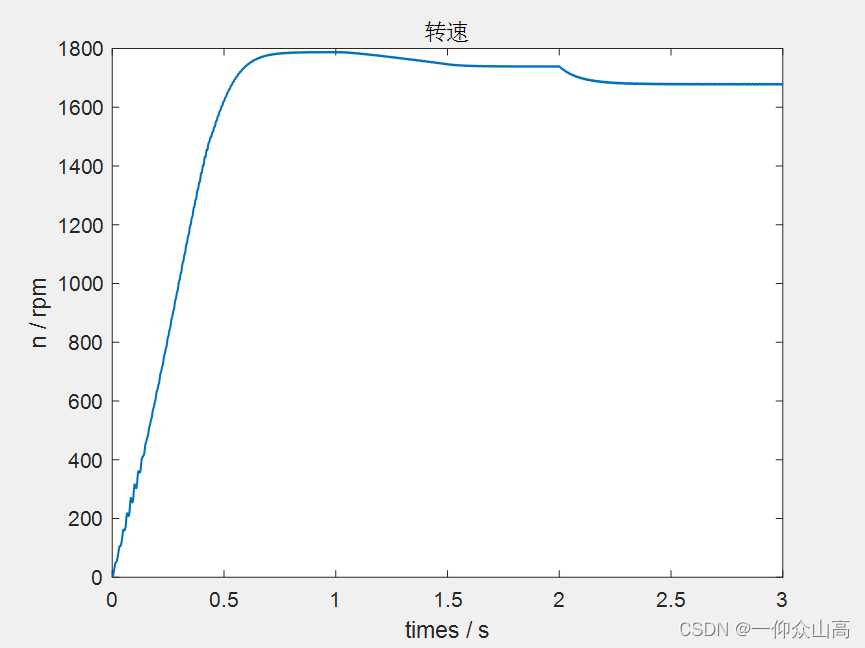
图12 转速随时间变化曲线
5. 结论
本文根据双绕组单相电容异步电动机在静止dq坐标系下的数学模型导出了相应的dq轴等效电路,然后根据机电类比原理(即根据机械运动方程(方程10)和RL电路对应的微分方程进行类比),得到对应的等效电路,利用Matlab中的Simulink/Power system工具箱的元件建立了全等效电路的双绕组单相电容异步电动机仿真模型,经仿真实例验证,所建仿真模型是完全正确的。所建立的仿真模型可以应用到电力系统和电机控制系统的仿真中去。建模方法适用于任何电机。
6. 参考资料
(1).电机瞬态过程分析的Matlab建模与仿真. 电子工业出版社,2013.8
(2).机械系统的电气类比. Online Tutorials, Courses, and eBooks Library | Tutorialspoint
(3).asynchronous (induction motors). mathworks.com
(4). 电机的Matlab/Simulink建模方法. CSDN















 1614
1614











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









