






降本,仍是车企智能化普及的主旋律。
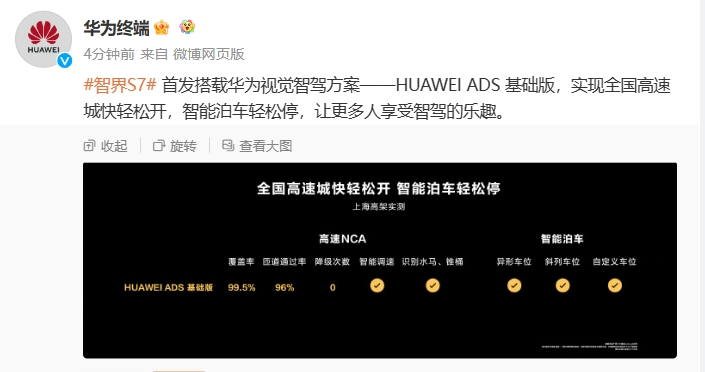
本周,随着华为正式开启智界S7的规模化交付,同步首发的还有华为的视觉智驾HUAWEI ADS 基础版,相比于高阶版本(支持城区NOA),取消激光雷达,支持高速NOA和智能泊车。
同时,在保持毫米波雷达(3R)和超声波传感器(12U)数量不变的前提下,相比于高阶版本,摄像头减少一颗后向,从11V降至10V。
此外,占据智驾系统核心成本之一的域控制器,也从华为MDC610降级至510版本。
在功能细节部分,相比于激光雷达版本,ADS基础版还取消了侧向障碍物防碰撞、异形障碍物自动紧急制动以及循迹倒车(RA)、机械车位泊车辅助以及高阶代客泊车功能。
调整的背后,按照华为的说法,主要是两方面的诉求:1、通过硬件降本、功能降维,让更多的用户可以花费更低价格体验华为的智驾;
2、高阶版本成本仍较高(包括更高算力的域控制器以及激光雷达),30万以下车型搭载华为高阶智能驾驶,都是在亏本卖。
这不是行业个案。
实际上,包括理想、小鹏、广汽、极氪、奇瑞等同行,也都采用了类似的配置策略,同时,在传感器、芯片等部分进行差异化配置。
首先,在芯片层面,在算力和数量上均呈现新的变化。
以小米SU7为例,为了降低智能驾驶的入门级价格门槛,高速NOA仅配置算力为84TOPS的英伟达Orin-N版本。极氪、小鹏则采取单双Orin-X的差异化配置。
实际上,从行业趋势来看,对于智驾算力的需求,也从过去的简单粗暴堆叠算力转变为如何充分发挥有效算力的阶段。
让算力需求回归理性,已经是大势所趋。过去,几百TOPS用于跑高速NOA,既有算法优化不到位的问题,也有预留升级城区NOA的考虑。
不过,按照传统汽车的开发模式,如果不考虑功能的深度迭代,几十TOPS的算力,也并非不能落地NOA。
比如,几年前,小鹏首发搭载的英伟达Xavier,算力也仅有30TOPS,就已经可以支持高速NGP。只是,如果需要迭代至城区NOA,算力的确有些捉襟见肘。
但,对于大部分车型定位来说,高速NOA已经是上限。尤其是30万元以下车型,车企对于芯片选型的性价比要求是首要考虑因素。
这也给了后来者更多的抢单机会。
其中,华山二号A1000芯片是黑芝麻智能首款乘用车前装量产落地的芯片产品,可支持从泊车到L2的5V1R方案和10V NOA方案,单芯片即可实现行泊一体功能。
公开信息显示,目前,华山二号A1000已经处于全面量产状态,量产车型包括领克08、合创V09、东风eπ007等。
与此同时,基于整车电子架构升级的系统性降本(比如,基于多域融的全新模式),也是去年开始不少主机厂的下一代产品体系策略调整。
比如,黑芝麻智能推出的武当系列高性能跨域计算芯片,基于单芯片实现舱驾一体,提供8155级别的座舱芯片能力并加载上高速NOA、网关等功能,可以帮助车企将全域智能化下探至15万元级别市场。
而在传感器部分,摄像头是本轮智能化下探的唯一受益者。目前,高速NOA的摄像头配置数量集中在7V-13V之间,相比于基础L2(单V为主),摄像头数量呈现指数级增长。
高工智能汽车研究院监测数据显示,2023年,NOA配置摄像头上车搭载总数达到657.95万颗,以3%的新车交付量占比,贡献整个舱外摄像头市场约12%的份额(如果排除全景环视,这个比例会更高)。
而同比增速更是夸张。数据显示,2023年NOA配置摄像头总数同比上一年度增长245.02%,单车搭载摄像头达到10.39颗。
相比而言,毫米波雷达和激光雷达,形势不容乐观。其中,激光雷达被拦在高速NOA和城区NOA之间,后续增量只能寄希望于城区NOA的普及力度。
而即便是价格便宜的毫米波雷达,也是车企降本的首选,更是让曾经的5R配置减配为3R。以华为为例,去年开始,ADS 2.0系统已经在部分车型从早前的6颗减配为3颗。
此外,小鹏汽车推动智驾系统降本,除了“轻地图”方案,还有“轻雷达”解决方案。“全场景智驾的终极架构XBrain,能让X9减少两颗前向角雷达,这也是高阶智驾降本的路径之一。”
高工智能汽车研究院监测数据显示,2023年中国市场(不含进出口)乘用车前装标配毫米波雷达(不含舱内)2217.93万颗,同比仅增长23.54%,相比于上年同期增速下滑近8个百分点。
此外,过去被不少车企视为隐性成本的高精度地图(外采第三方图商方案),也在逐步被车端建图方案(车端地图引擎)所替代,也就是通常所说的“无图”方案。
同时,由于目前的高精度地图存在高成本、维护更新频率低等问题,其在城市NGP的大面积应用上还存在不小的难度。而车企的深度介入,不管是纯视觉,还是无图,目标只有一个:加快开城和泛化。
从目前各家正在推动“无图”(或者说不依赖第三方高精度地图)智驾方案落地的车企招聘方向来看,高精度地图众包更新(地图数据系统)是主要岗位之一。
这其中,主要涉及众包数据融合算法和地图差分算法设计,自动化更新和制图,以及车端高精地图引擎设计、开发与维护。
目前,从车企的配置策略来看,高速NOA和城区NOA大概率是采用两种不同的平台;前者解决性价比问题,在基础功能上,无论是安全性、可靠性都要高于C-NCAP的要求。
后者,则是解决城市复杂场景问题,实现多传感器冗余,要有足够的安全备份(尤其是L3/L4落地预期已经出现)。激光雷达、高算力平台仍是主旋律。
而接下来,从高速NOA到全场景智驾的降本“炸弹”何时会被引爆?就要看特斯拉FSD能否顺利进入中国市场。
今年初,特斯拉的FSD Beta 12.3.2在美国实现OTA升级,正式释放基于纯视觉的Autopark自动泊车功能,并且该公司计划在下个月正式发布基于纯视觉的高阶泊车-智能召唤功能。
这被视为特斯拉迈向真正全场景(高低速行泊)纯视觉智驾时代的关键一步;要知道,目前在汽车行业,特斯拉是唯一一家真正的纯视觉方案(有且只有摄像头)落地车企。


















 741
741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









