






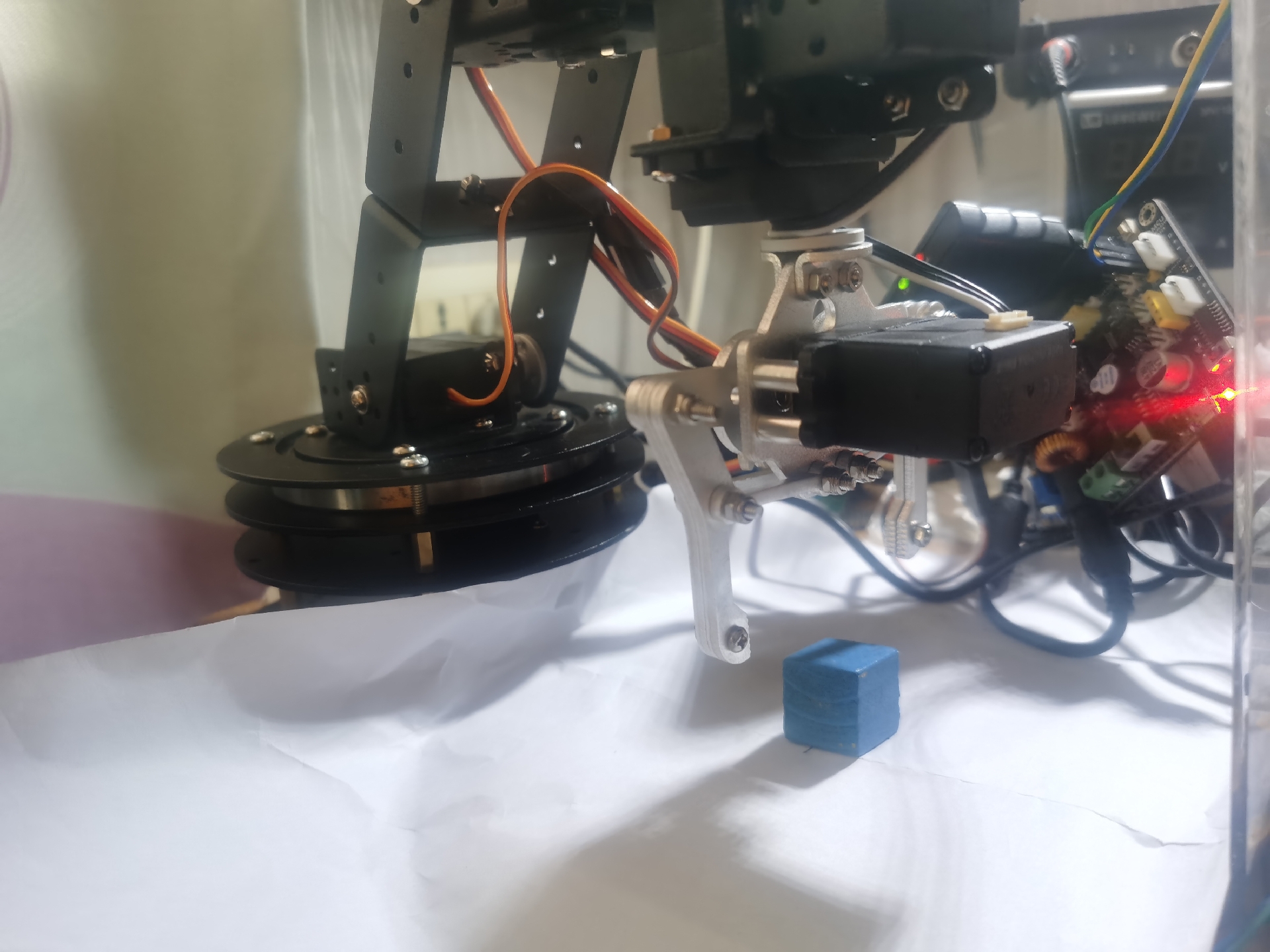
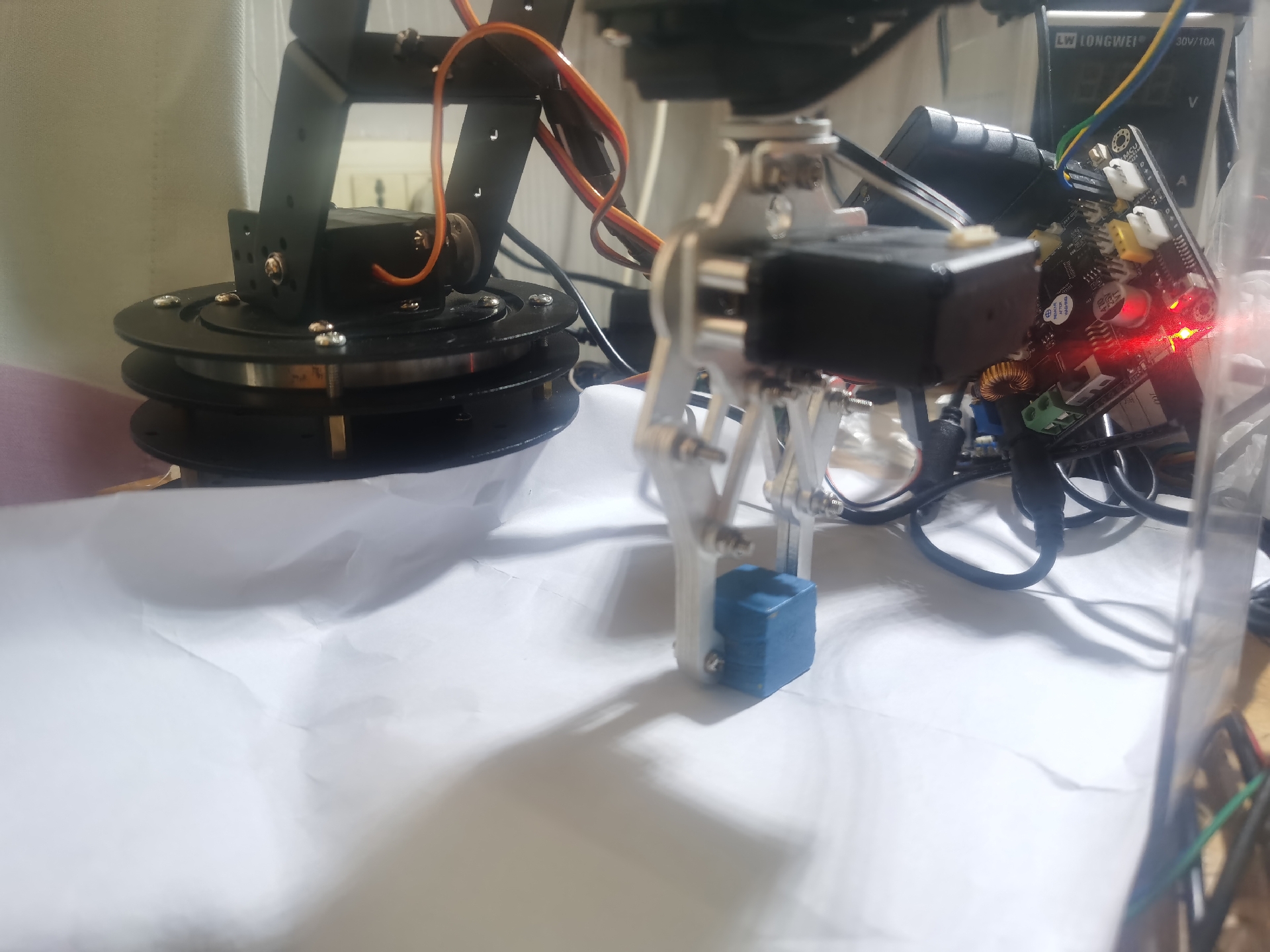
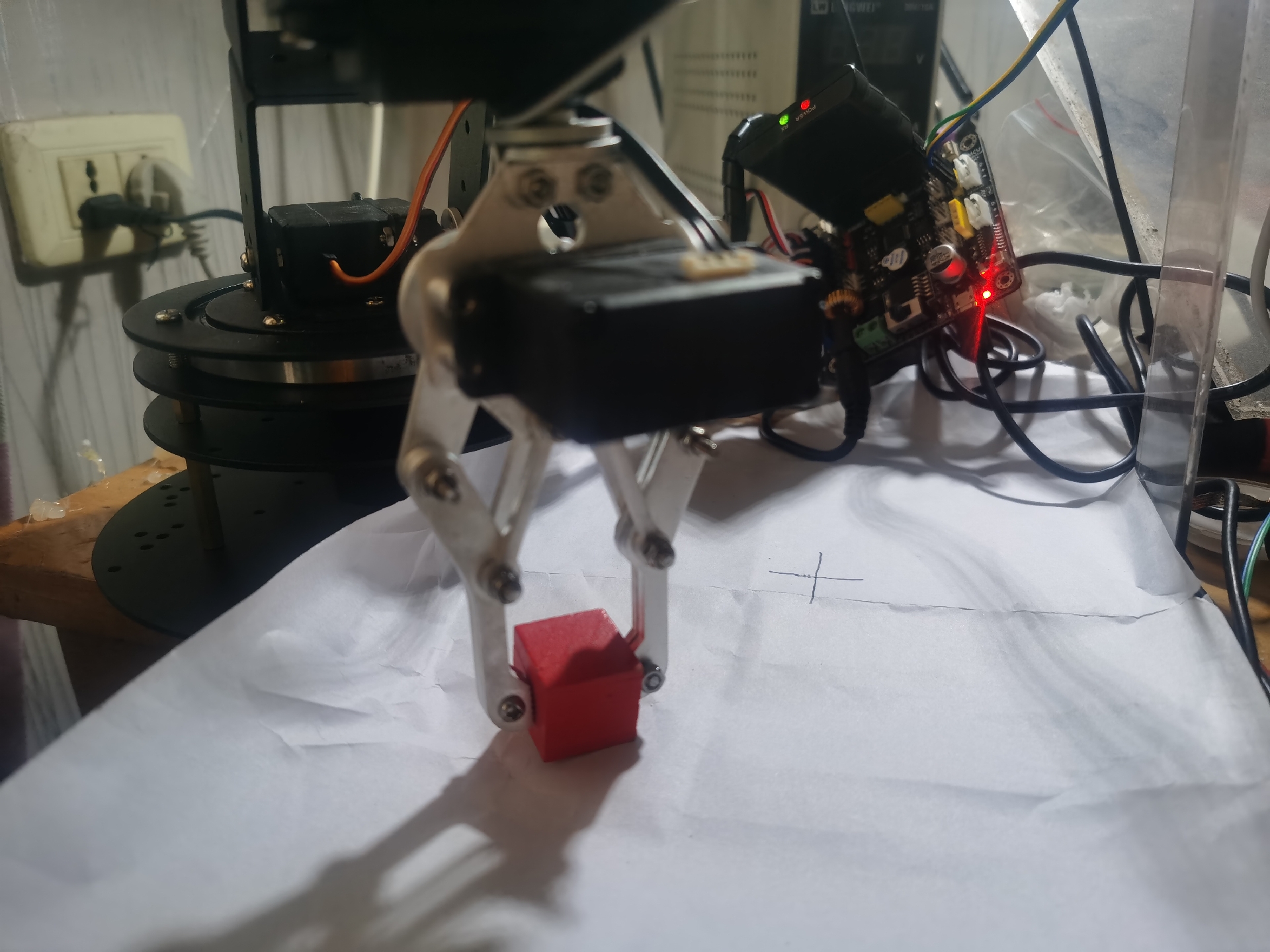
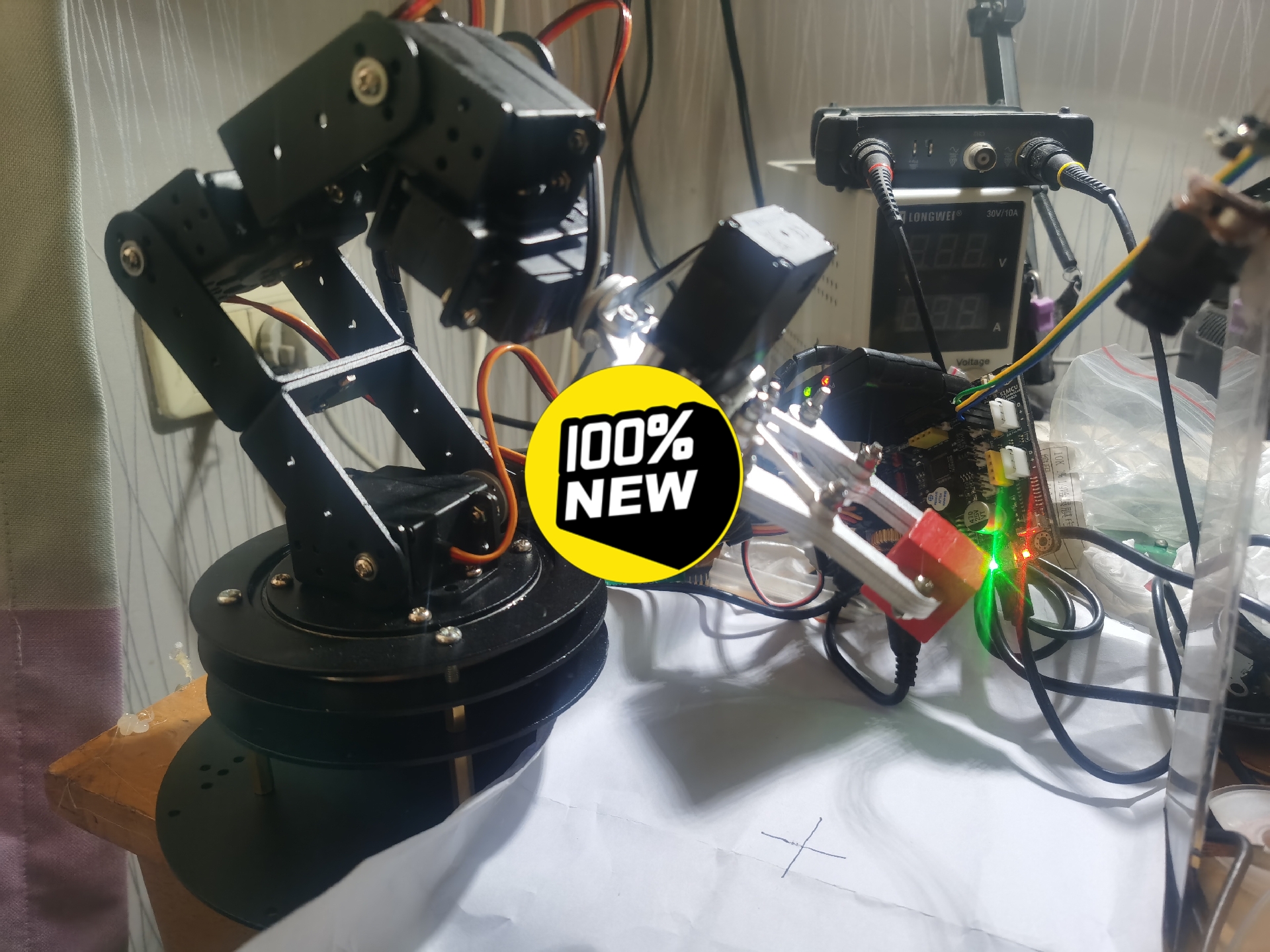
OPEMV控制机械手实现物体分类,视觉识别,软件编程利用机械手达到物体分类的功能;OPNMV模块实现识别,控制舵机六轴机械手完成物体的夹持、转移、控制功能。
ID:8230668204325339
有头脑的羊肉卷
近年来,随着人工智能(AI)技术的迅猛发展,机械手的应用范围日益广泛。机械手作为一种能够执行各种精细操作的设备,其在物体分类、视觉识别等领域中扮演着重要角色。然而,要让机械手实现物体分类、视觉识别等功能,需要进行复杂的软件编程和控制。
在这样的背景下,本文将围绕OPEMV控制机械手实现物体分类、视觉识别的功能展开讨论。OPEMV(Object Positioning & Environment Monitoring Vision)是一种基于视觉识别的模块,通过图像处理和算法分析,实现机器对物体的识别与定位。而机械手则承担着具体的物体夹持、转移和控制任务。
首先,我们将重点介绍OPEMV模块的工作原理。OPEMV模块通过从摄像头获取图像,通过图像处理算法,提取出物体的特征信息,如颜色、形状、纹理等。然后,通过机器学习算法对这些特征进行分析和比对,从而实现对物体的分类与识别。这使得机械手能够准确地判断不同物体的属性,并作出相应的操作。
接下来,我们将重点探讨软件编程对于机械手物体分类功能的实现。软件编程对于机械手的控制至关重要。通过编写相应的程序,我们可以实现机械手的运动控制、物体夹持和转移等功能。在物体分类中,软件编程使得机械手能够根据OPEMV模块获取到的物体信息,自动调整机械手的姿态和位置,准确地夹持和转移不同的物体。各种编程语言和框架都可以用于实现这些功能,如C++、Python、ROS等。
此外,机械手的六轴控制也是实现物体分类的重要环节之一。通过控制舵机的角度和速度,我们可以调整机械手各关节的姿态,实现精准的夹持和转移。六轴机械手的灵活度更高,能够适应各种复杂的操作环境。通过与OPEMV模块的配合,我们可以实现更加精确的物体分类和视觉识别功能。
综上所述,通过OPEMV控制机械手实现物体分类、视觉识别是一个复杂的工程,需要软件编程和控制技术的综合运用。OPEMV模块通过视觉识别和图像处理技术,实现了对物体的分类与定位。软件编程则实现了机械手的运动控制和物体夹持功能。六轴机械手的灵活度使得其能够适应各种操作环境。这些技术的共同作用,使得机械手在物体分类和视觉识别领域有着广阔的应用前景。
随着人工智能技术的不断进步,机械手在物体分类、视觉识别等领域的应用将会越来越广泛。未来,我们可以期待机械手在智能制造、物流仓储等领域中发挥更大的作用,带来更高效、精准的操作体验。同时,我们也需要不断推进相关技术的研究和创新,以进一步提升机械手的性能和应用能力。
注:本文所提及的技术和方法仅为示意,实际应用中还需根据具体需求进行调整和优化。
以上相关代码,程序地址:http://matup.cn/668204325339.html















 4231
4231











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









