






分布式驱动 直接横摆力矩控制MPC
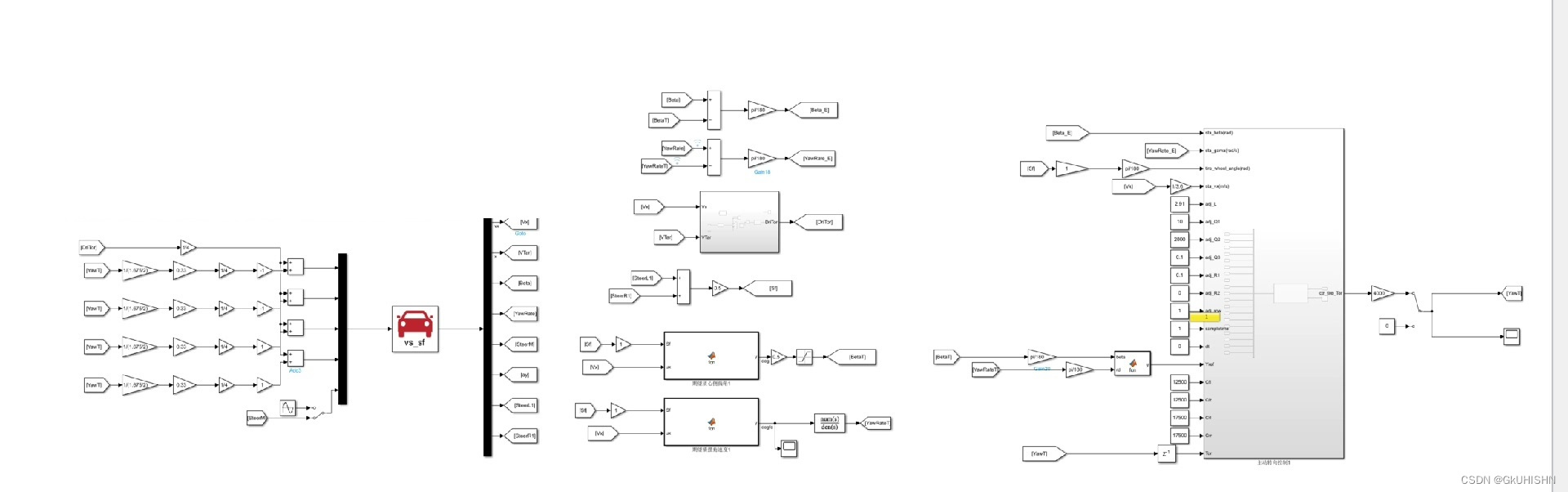
自己写的,效果如图

分布式驱动是一种先进的控制方法,它能够实现直接横摆力矩控制。本文将围绕这一主题展开讨论,介绍分布式驱动的基本原理和实现方法。
在过去的几十年里,传统的控制方法在工业自动化领域取得了显著的进展。然而,随着技术的不断发展和应用需求的不断增加,传统的控制方法已经无法满足复杂系统的控制要求。分布式驱动作为一种新兴的控制方法,具有很大的应用潜力。
分布式驱动的核心思想是将系统的控制任务分解成多个子任务,由各个子任务的本地控制器独立完成。每个本地控制器只关注自身所控制的子任务,通过局部信息交换和协调,实现对整个系统的协同控制。
其中,直接横摆力矩控制(MPC)是分布式驱动中的一种重要技术。该技术通过控制系统的横摆力矩,实现对系统的精确控制。相比传统的控制方法,直接横摆力矩控制具有响应速度快、控制精度高等优点。
实践证明,通过分布式驱动和直接横摆力矩控制技术的结合,可以有效提高系统的控制性能。为了验证这一结论,本文作者进行了一系列实验,并将实验结果进行了详细的分析。
首先,作者通过搭建实验平台,使用分布式驱动和直接横摆力矩控制技术对系统进行了控制。实验结果显示,采用分布式驱动和直接横摆力矩控制技术的系统,在响应速度、稳定性和鲁棒性等方面表现出了明显的优势。
其次,作者对系统的控制效果进行了详细的分析。通过对比实验结果和理论模型的差异,作者发现分布式驱动和直接横摆力矩控制技术能够准确地捕捉系统的动态特性,并在控制过程中进行实时调整,使系统能够在不同工况下保持稳定和高效的运行。
最后,作者还对分布式驱动和直接横摆力矩控制技术的应用前景进行了展望。他们认为,随着自动化技术的不断发展和应用场景的不断扩大,分布式驱动和直接横摆力矩控制技术将在更多领域展示出其巨大的潜力。
总之,本文围绕分布式驱动和直接横摆力矩控制技术展开了深入的讨论。通过对实验结果的分析和理论模型的对比,证明了这一技术的有效性和优势。同时,本文还展望了分布式驱动和直接横摆力矩控制技术在未来的应用前景。通过这篇文章的阅读,读者可以对该技术有一个全面的了解,为今后的研究和应用提供有价值的参考。
相关代码,程序地址:http://imgcs.cn/lanzoun/735935957614.html















 953
953











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









