







 本文介绍了基于7自由度模型的车辆控制系统设计,用于车道保持和定速巡航。通过Simulink模型,实现了横向偏差和航向角偏差的PID控制,并通过仿真展示了良好的轨迹跟踪和车速控制效果。
本文介绍了基于7自由度模型的车辆控制系统设计,用于车道保持和定速巡航。通过Simulink模型,实现了横向偏差和航向角偏差的PID控制,并通过仿真展示了良好的轨迹跟踪和车速控制效果。
目录
前言
前面的两篇文章分别建立了操稳性7自由度非线性模型及设计了简单的车速保持,本篇文章将进行车道保持(轨迹跟踪)和定速巡航控制。
对于车辆轨迹跟踪,实际上无非就是控制速度和转向。速度可以通过控制油门和制动踏板,或者通过控制制动力距和驱动力矩,而转向即控制车轮转角。
1. 道路设计
如果单纯用simulink去仿真分析,那么就必须要在simulink中制作简单的轨迹,这里直接将carsim中的数据点导出,然后在simulink中制作车辆行驶轨迹。
具体操作方法如下:
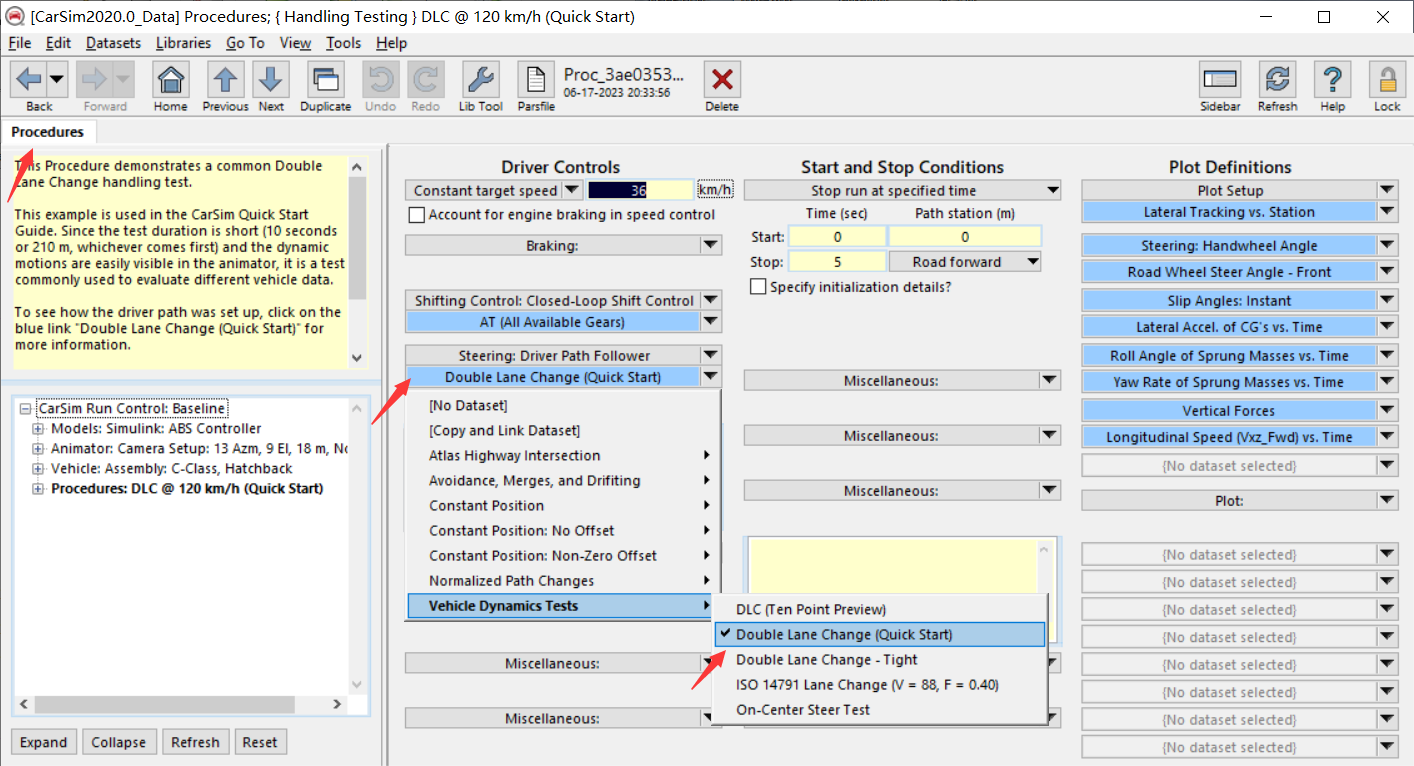
①打开carsim procedure,找到双移线工况
②导入到excel中

③matlab读取excel表中数据到工作区间:
XY=xlsread('表名.xlsx')
④使用lookup table 1-D
注:实际上也可以利用相关函数直接得到相应轨迹。
2.控制器设计
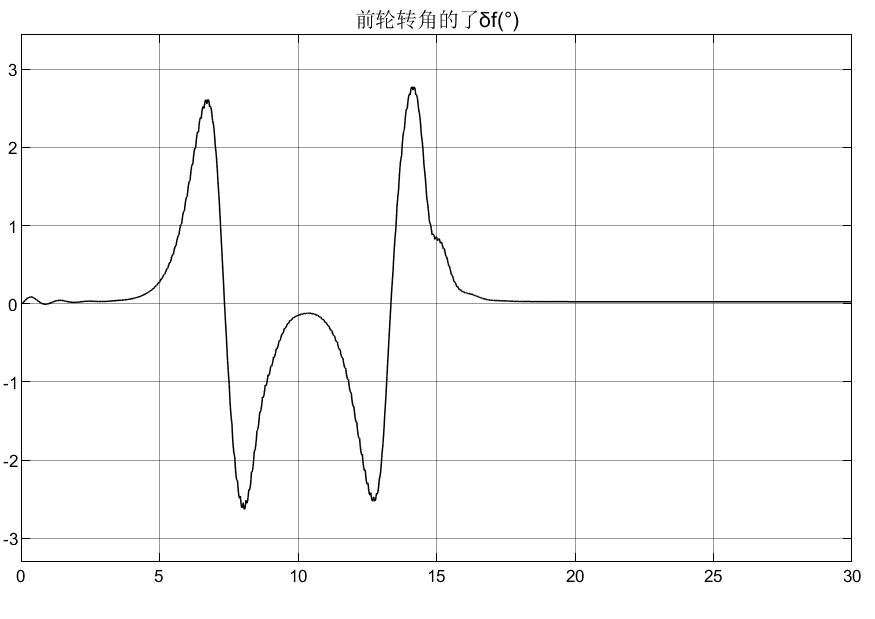
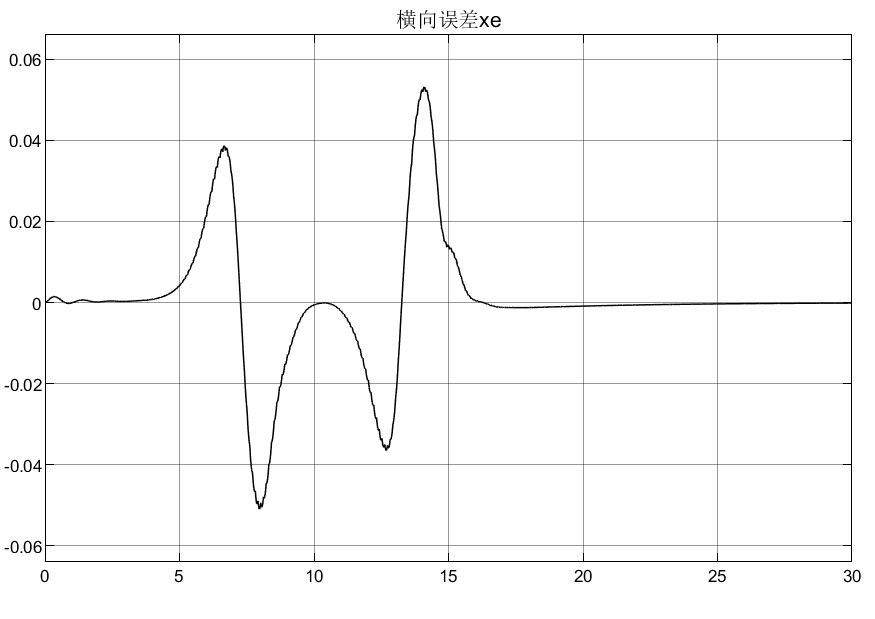
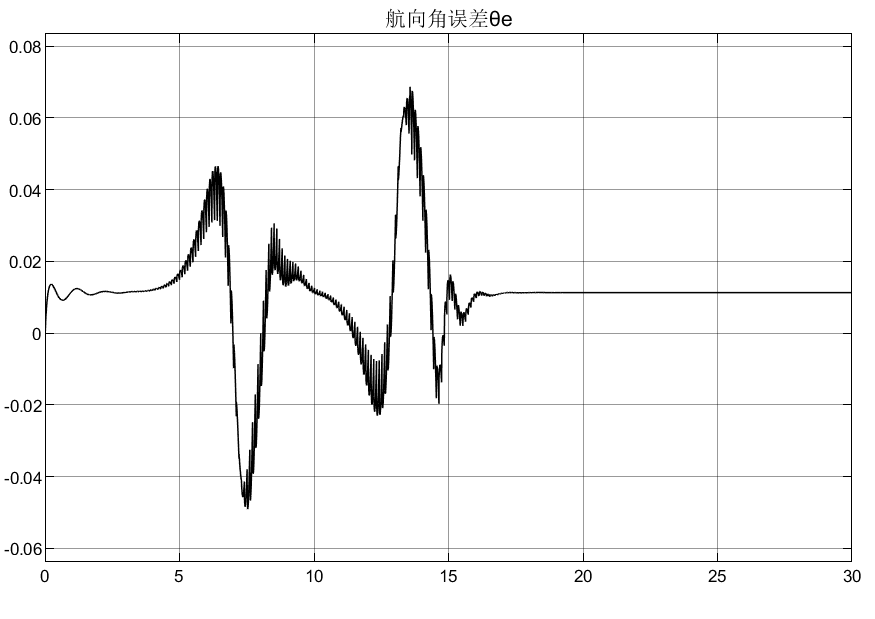
这里需要进行轨迹跟踪,所以对车辆的转向进行控制,也就是前轮转角δf,那么可以将横向偏差或者航向角偏差作为误差变量,这里还是以最常规的PID控制为例设计控制器。
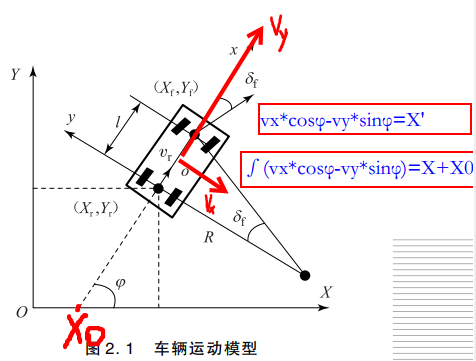
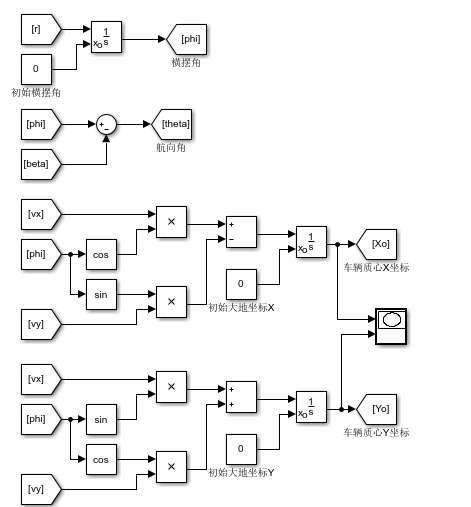
2.1 横向偏差和航向角偏差计算
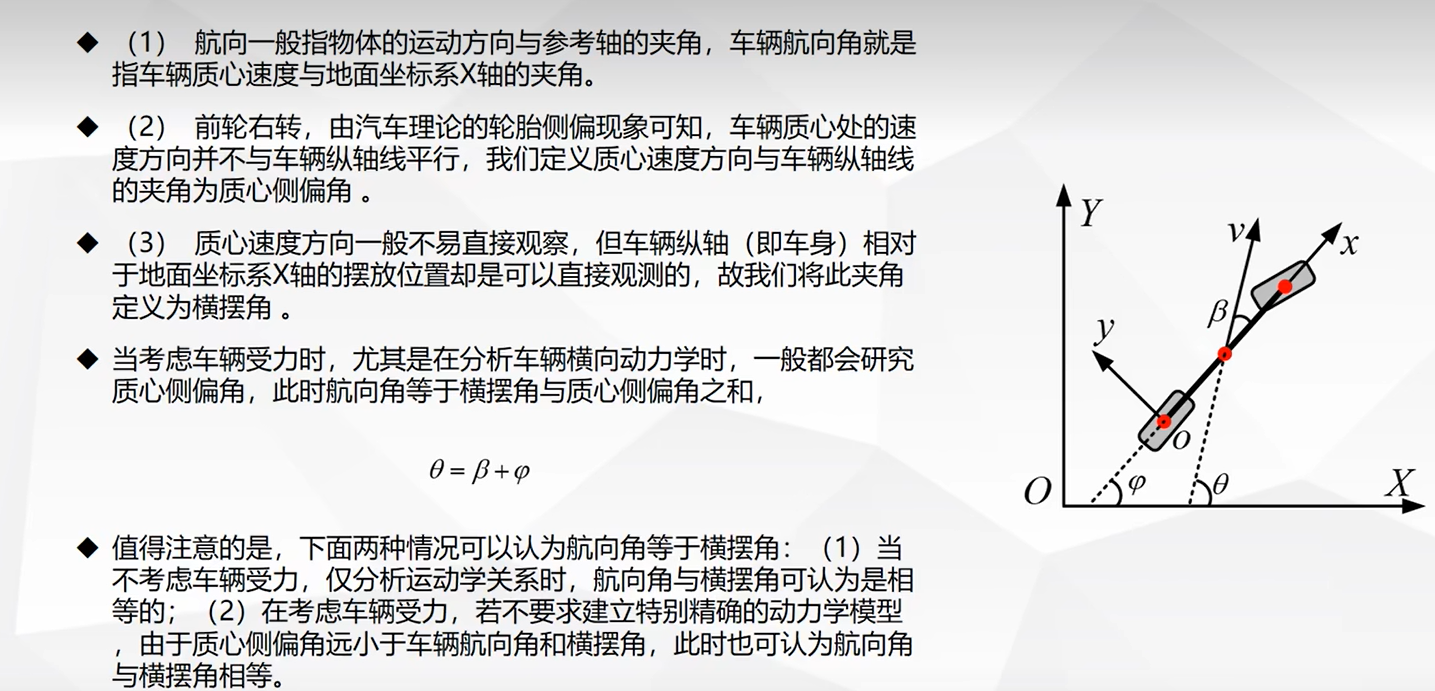
这里便设计大地坐标系和车辆坐标系的映射几何问题了。
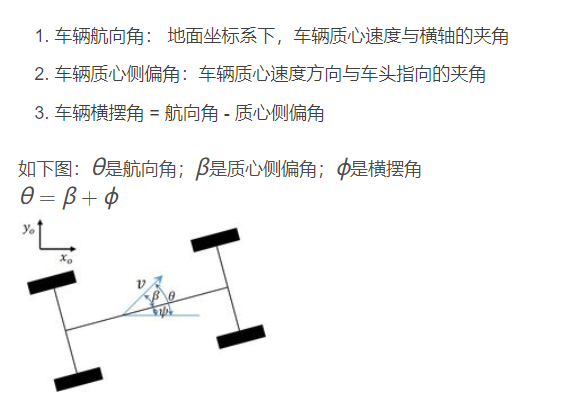
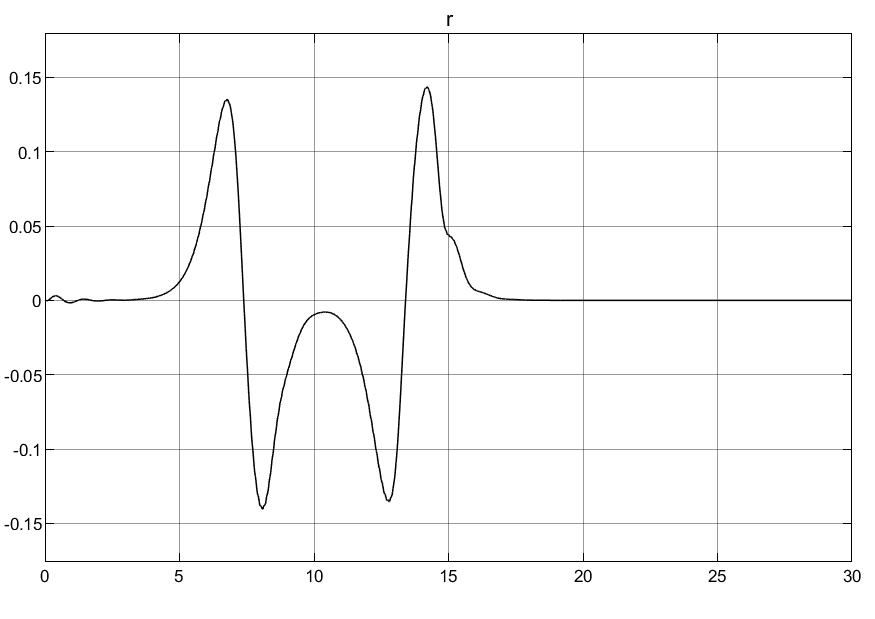
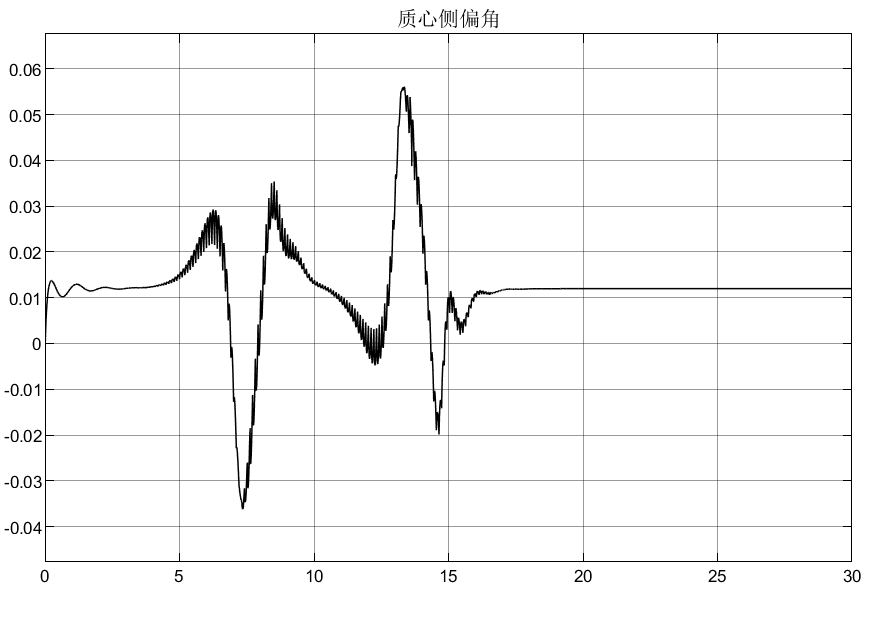
横摆角速度和质心侧偏角是两个最能准确刻画车辆行驶稳定性的参数,前者主要用于描述行驶中车身的稳定情况, 反映车辆行驶过程中航向角变化速度, 重点描述车辆的转向特性; 后者则主要用于描述车辆对理想轨迹的跟踪效果, 反映车辆实际行驶轨迹与控制目标的偏离程度。
——————————《多轮独立电驱动车辆横摆稳定性滑模控制研究—马晓军》
第7节_二自由度模型及航向角、质心侧偏角与横摆角_哔哩哔哩_bilibili
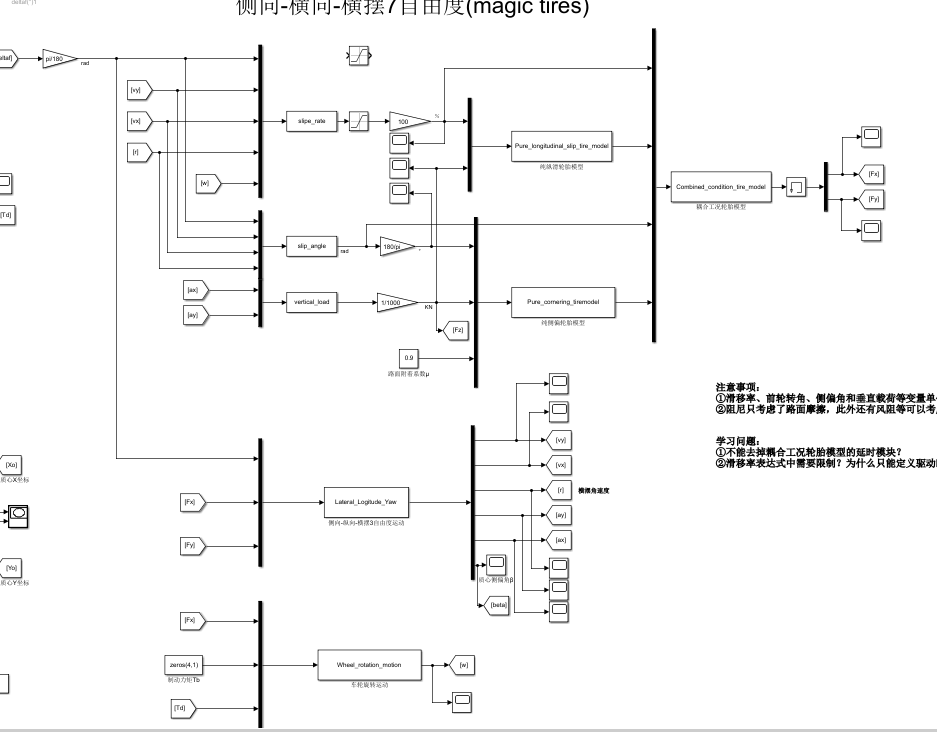
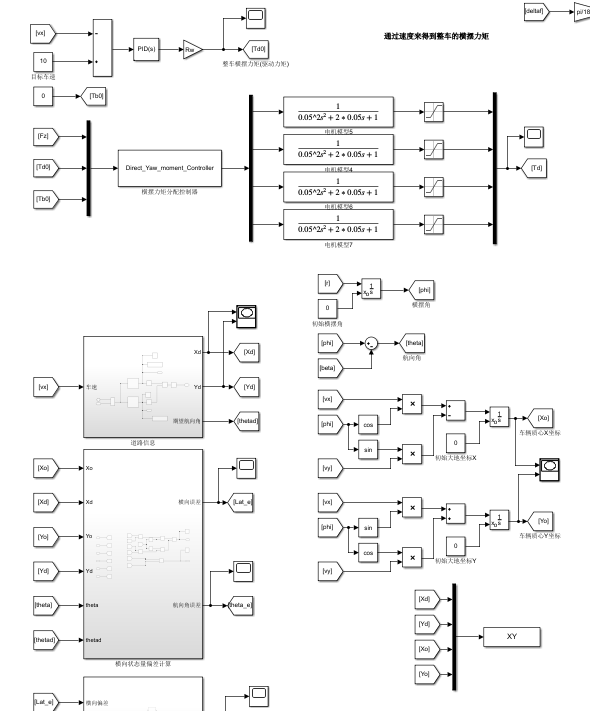
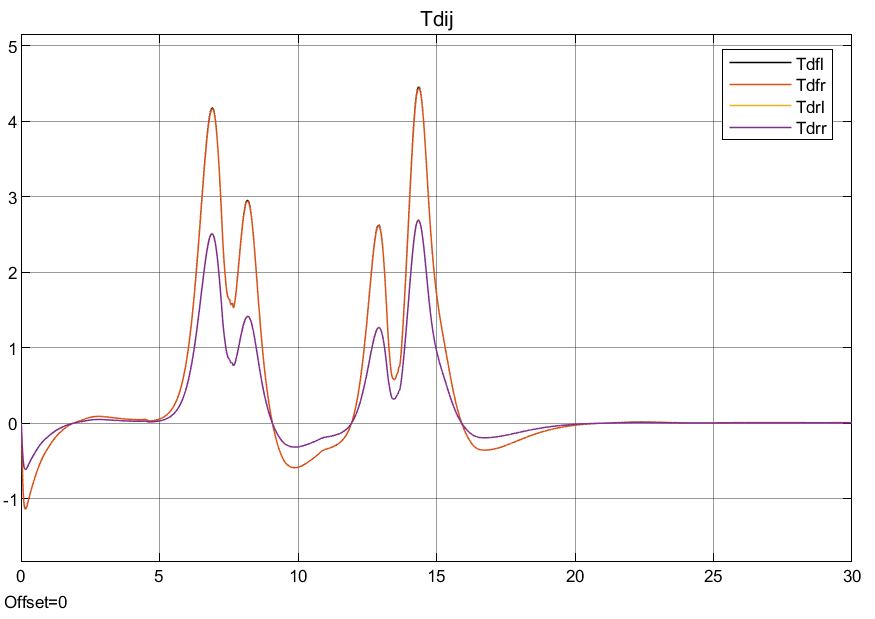
3.基于7自由度模型的横摆力矩分配控制、车道保持和定速巡航
3.1 7自由度simulink模型
3.2 控制器设计simulink模型
3.3 仿真结果
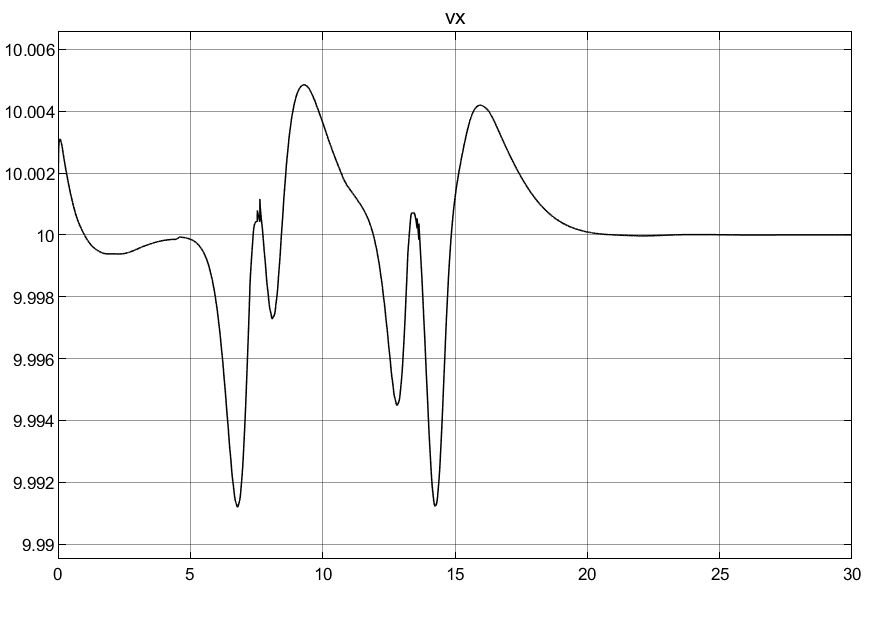
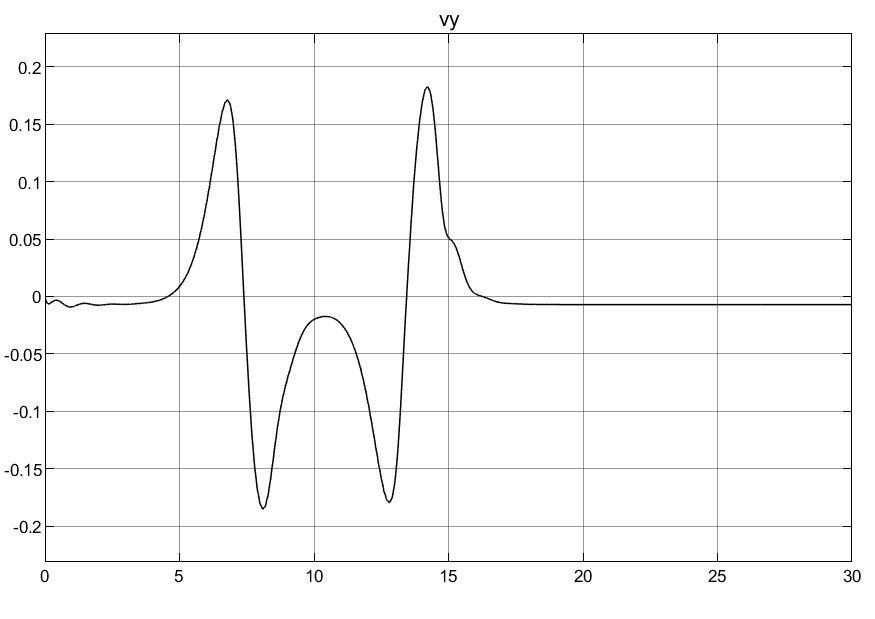
设定目标车速10m/s,跟踪轨迹为双移线,仿真结果如下所示。
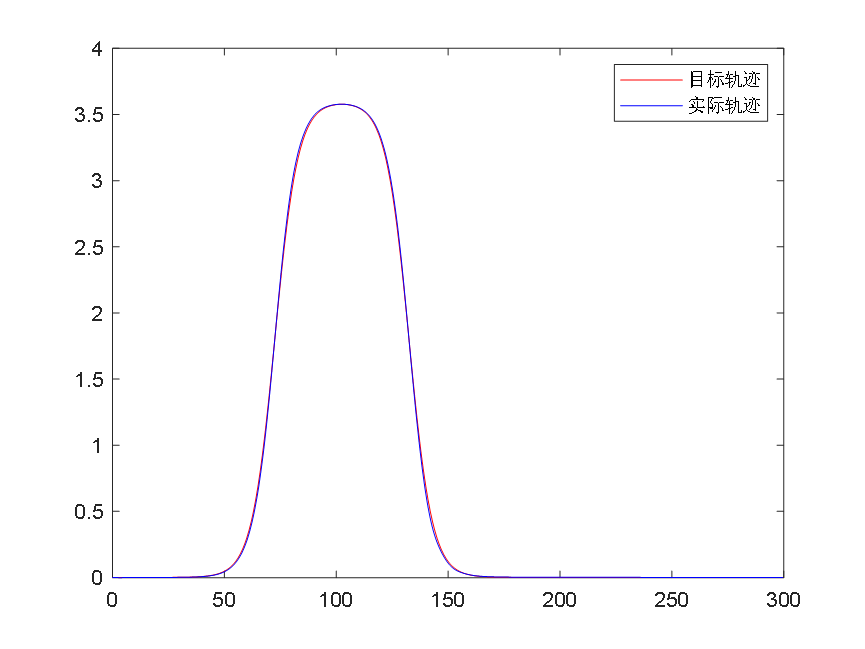

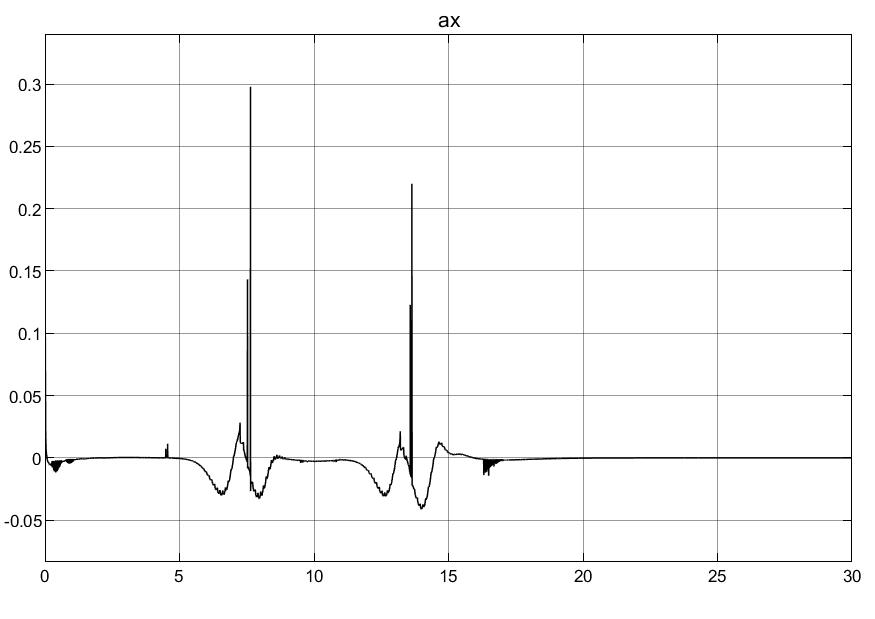
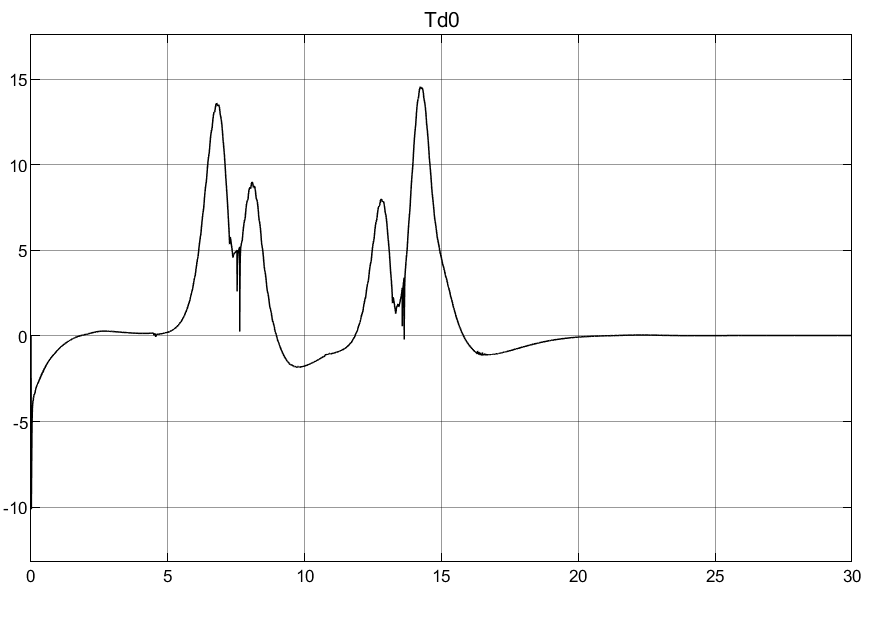
3.4 结果分析
(1)可以看到通过横向误差控制设计控制器得到的车辆实际轨迹与目标轨迹基本重合。
(2)车速在25s左右能够完全与目标车速贴合,且在双移线工况峰波处行驶速度也基本上在目标车速附近。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











