






 舵机主要由电机控制板、无核心马达、齿轮组和电位器组成,通过PWM信号控制电机转动,电位器提供反馈。常见故障包括齿轮扫齿、电机过流、电子回路断路等,可通过更换部件或调整解决。数码舵机的反应速度快于模拟舵机,因为其PWM驱动频率更高。
舵机主要由电机控制板、无核心马达、齿轮组和电位器组成,通过PWM信号控制电机转动,电位器提供反馈。常见故障包括齿轮扫齿、电机过流、电子回路断路等,可通过更换部件或调整解决。数码舵机的反应速度快于模拟舵机,因为其PWM驱动频率更高。
Q:舵机(Servo)里面都是些什么?
A:电机控制板、无核心马达(电机)、齿轮组、电位器

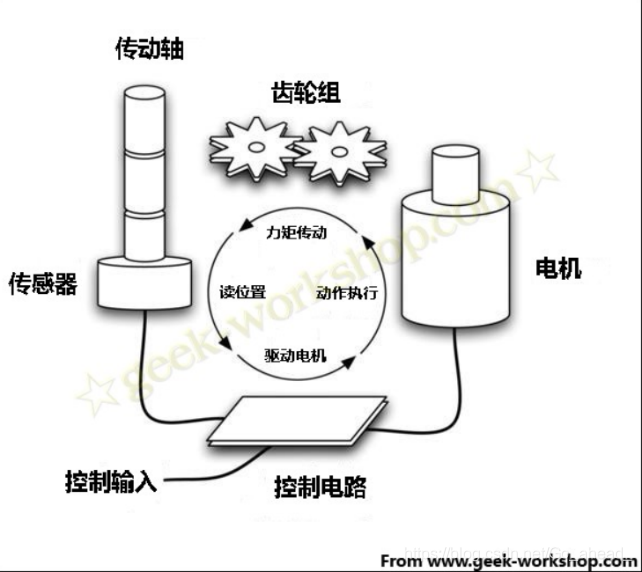
电机控制板主要是用来驱动电机和接受电位器反馈回来的信息。电机嘛,动力的来源了,这个不用太多解释。电位器这里的作用主要是通过其旋转后产生的电阻的变化,把信号发送回电机控制板,使其判断输出轴角度是否输出正确。齿轮组的作用主要是力量的放大,使小功率电机产生大扭矩。
舵机底壳拆开后就可以看到,主要是电机与控制板

控制板拿起来后下方是与控制板连接的电位器

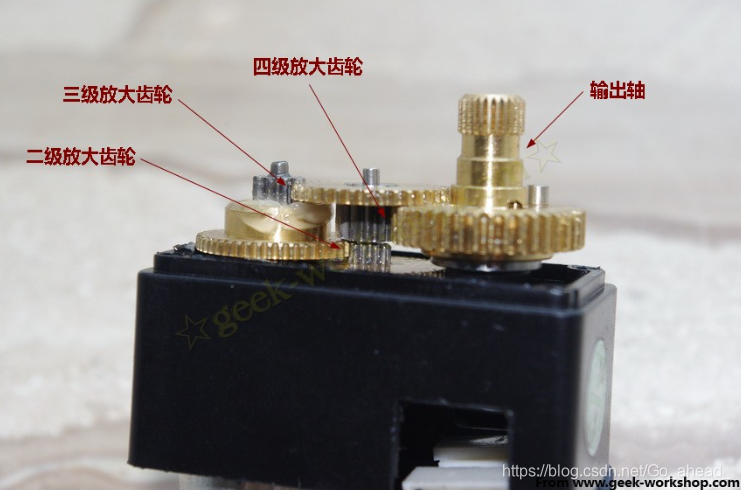
从顶部来看电机与电位器,与电机齿轮直接相连的为第一级放大齿轮。

经过一级齿轮放大后,再经过二、三、四级放大齿轮,最后再通过输出轴输出。
Q:舵机外的三根线是从上面哪个构件上引出来的?
A:全部由控制电路板引出,
Q:舵机依靠什么控制?(得说哪国语言舵机才听得懂)
A:PWM信号
Q:PWM是什么?
A: PWM,全称Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比,例如方波的占空比就是50%。
如下图就是占空比为20%的PWM波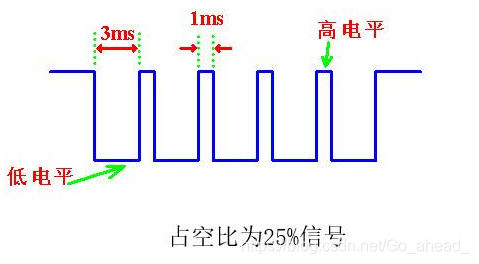
PWM相关概念
脉冲:如图
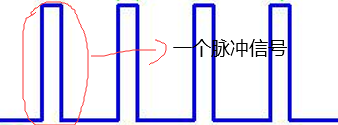
脉宽:就是PWM信号的一个周期内有效电平的时间
占空比=脉宽/周期。其大小由PWM的频率和卖矿共同决定。
控制死区:
死区说白了就是停止角度的精确度,也就是所说的定位精度。
Q:舵机工作原理是啥?
A: 舵机的工作原理是由接收机或者单片机发出讯号(PWM)给舵机,经由电路板上的 IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
舵机有很多种。例如电机就有有刷和无刷之分,控制电路有数码和模拟之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。
以下两个问题只做了解
Q:舵机调速原理
A:常见舵机电机一般都是永磁直流电动机,如直流有刷空心杯电机。直流电动机有线性的转速-转矩特性和转矩-电流特性,可控性好,驱动和控制电路简单,驱动控制有电流控制模式和电压控制两种模式。舵机电机控制实行的是电压控制模式,即转速与所施加电压成正比,驱动是由四个功率开关组成H桥电路的双极性驱动方式,运用脉冲宽度调制(PWM)技术调节供给直流电动机的电压大小和极性,实现对电动机的速度和旋转方向(正/反转)的控制。
Q:数码舵机的反应速度为何必模拟舵机快(我们组的所有舵机都是模拟舵机)
A:数码舵机的PWM驱动频率300Hz比模拟舵机的50Hz高6倍,则舵机电机转速快6倍,所以数码舵机的反应速度就比模拟舵机快6倍---这种说法就不对
模拟舵机是直流伺服电机控制器芯片,只能接收50Hz到300Hz以内的PWM外部控制信号,太高的频率就不行了。
舵机一般故障判断
1)炸机后舵机电机狂转、舵盘摇臂不受控制、摇臂打滑。
可以断定:齿轮扫齿了,换齿轮。
2)炸机后舵机一致性锐减,现象是炸坏的舵机反应迟钝,发热严重,但是可以随着控的指令运行,但是舵量很小很慢。
基本断定:舵机电机过流了,拆下电机后发现电机空载电流很大(>150MA),失去完好的性能(完好电机空载电流≤60-90MA),换舵机电机。
3)炸机后,驱动舵机,无任何反应。
基本确定:舵机电子回路断路、接触不良或舵机的电机、电路板的驱动部分烧毁导致的,先检查线路,包括插头,电机引线和舵机引线是否有断路现象,如果没有的话,就进行逐一排除,先将电机卸下测试空载电流,如果空载电流小于90MA,则说明电机是好的,那问题绝对是舵机驱动烧坏了,9-13克微型舵机电路板上面就有2个或四个小贴片三极管,换掉就可以了,有2个三极管的那肯定是用Y2或IY直接代换,也就是SS8550,如果是有四个三极管的H桥电路,则直接用2个Y1(SS8050)和2个(SS8550)直接代换,65MG的UYR ---- 用Y 1(SS8050 IC=1.5A); UXR------用Y2(SS8550,IC=1.5A)直接代换。
4)舵机故障是摇臂只能一边转动,另外一边不动的话。
判断:舵机电机是好的,主要检查驱动部分,有可能烧了一边的驱动三极管,按照(3)维修即可。
5)维修好舵机后通电,发现舵机向一个方向转动后就卡住不动了,舵机吱吱地响。
断定:说明舵机电机的正负极或电位器的端线接错了,电机的两个接线倒个方向就可以了。
6)崭新的舵机买回来后,通电发现舵机狂抖,但用一下控的摇臂后,舵机一切正常。
断定:说明舵机在出厂的时候装配不当或齿轮精度不够,这个故障一般发生在金属舵机上面,如果不想退货或者更换的话,自行解决的方法:卸下舵机后盖,将舵机电机与舵机减速齿轮分离后,在齿轮之间挤点牙膏,上好舵机齿轮顶盖,上好减速箱螺丝后,安上舵机摇臂,用手反复旋转摇臂碾磨金属舵机齿轮,直至齿轮运转顺滑、齿轮摩擦噪音减小后,将舵机齿轮卸下汽油清洗后,装齿轮上硅油组装好舵机,即可解决舵机故障。
7)有一种故障舵机表现很古怪:驱动舵机转动,舵机有正常的反应,但是驱动舵机固定某在一位置时,故障舵机摇臂还在慢慢的运行,或者摇臂动作拖泥带水,并来回动作。
经过多次维修后发现问题所在:应该紧密卡在舵机末级齿轮中电位器的金属转柄,与舵机摇臂大齿轮(末级)结合不紧,甚至发生打滑现象,导致舵机无法正确寻找控发出的位置指令,反馈不准,不停寻找导致的,解决了电位器与摇臂齿轮的紧密结合后,故障可以排除。按照改方法检修后故障仍旧存在的话,也有可能是舵机电机的问题或电位器的问题,需要综合分析逐一排查!
8)故障舵机不停的抖舵,排除无线电干扰,驱动摇臂仍旧抖动的话。
断定:电位器老化,换之,或直接报废掉,当配件!
9)数码斜盘舵机装机过后发现舵机运行不正常,快慢不一,退回厂家,后来换回3个后还是一致性差。
断定:最后才知道是什么原因,有些数码舵机对BEC要求,加装5.V3A 外置 BEC后,故障排除,与舵机质量无关。

















 9226
9226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









