










一、前言
此片文章主要介绍如果通过STM32系列开发板来读取TOF250(TTL接口)数据的教程
提示:以下的案例仅供参考学习使用
二、硬件准备
-
TOF250 :测距传感器

-
STM32系列开发板:STM32F103ZE 主频8M
提示:STM32系列开发板种类较多,此次测试使用的是普中科技的PZ6806L开发板,其他类型STM32开发板程序可能会有略微差异

-
TOF250尾线:购买时自带有一根尾线
二、软件准备
- KEIL IDE:参考官网下载安装教程

- 烧录软件:PZ-ISP V1.86 普中科技

三、硬件接线图
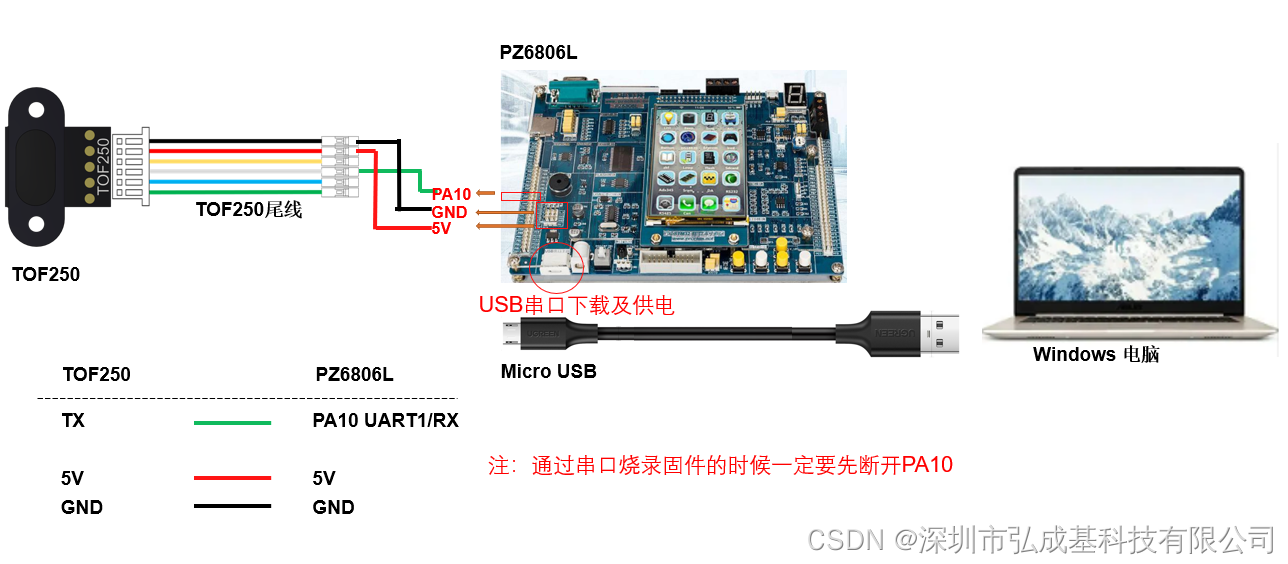
提示:通过串口方式烧录的时候清断开PA10
说明:
- STM32F103ZE共有三个串口,不过此次测试仅使用一个串口,方便理解
- USB打印结果需要用到串口1的TX
- 读取TOF250需要用到串口1的RX
四、例程源码
main.c
/**************************************************************
**技术论坛:https://blog.csdn.net/HCJ_Application/article/details/124058266
**修改日期:2022/4/27
**技术说明:基于STM32F103ZET6单片机,主频8M
**版本:V1.0
**作者:深圳市弘成基科技有限公司
**************************************************************/
#include "sys.h"
#include "usart.h"
unsigned int Tof250_dist = 0; //读取到TOF250的具体数值
unsigned int StringToDEC(unsigned char *rdata,unsigned char len);
int main(void)
{
u16 len; //检测每次接收到的长度,方便字符串转整数的时候进行处理
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
/**************************************************************
**TOF250串口通信协议:
**波特率 : 9600
**数据位 : 8
**校验 : 无
**停止位 : 1
****************************************************************/
uart_init(9600); //串口初始化为115200
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff; //得到此次接收到的数据长度
Tof250_dist = StringToDEC(&USART_RX_BUF[0],len); //把串口缓存的字符串转换成字符的形式
printf("%u cm\n",Tof250_dist); //打印结果输出,此单位需要随TOF250设定变更
USART_RX_STA=0; //接收完成后需要把长度及时清0
}
}
}
//字符串数组转换成数字
unsigned int StringToDEC(unsigned char* rdata,unsigned char len)
{
unsigned char i;
unsigned int wdata = 0;
unsigned char temp[4];
for(i=0; i<len-1; i++)
{
if((*(rdata+i) >= '0') && (*(rdata+i) <= '9')) temp[i] = *(rdata+i) - '0'; //字符串转换成数字
}
switch(i) {
case 1:
wdata = temp[i-1];
break;
case 2:
wdata = temp[i-2]*10 + temp[i-1];
break;
case 3:
wdata = temp[i-3]*100 + temp[i-2]*10 + temp[i-1];
break;
case 4:
wdata = temp[i-4]*1000 + temp[i-3]*100 + temp[i-2]*10 + temp[i-1];
break;
default:
break;
}
return wdata;
}
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
#endif
usart.c
#include "sys.h"
#include "usart.h"
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
//串口中断处理函数
/**************************************************************
**TOF250串口输出格式:
**Ascii 输出
**单位为cm(默认)
**后跟转义字符\n
**例如:测距为 121cm,则输出字符串 121
****************************************************************/
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(Res != '\n')
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
//if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}else{
USART_RX_STA|=0x8000; //接收完成了
}
}
}
}
五、烧录说明
5.1 烧录接线示意图
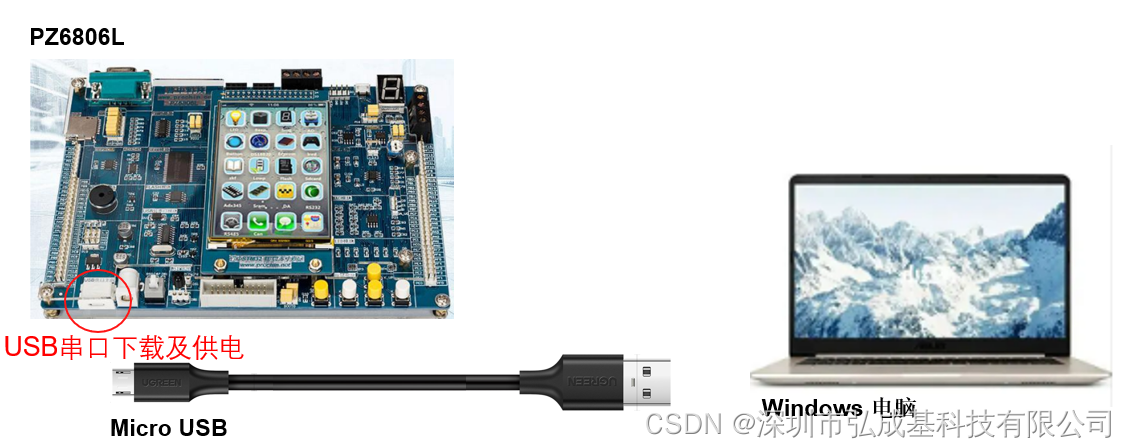
5.2 烧录动态图
提示:烧录过程中请先断开TF250与开发板先断开,否则无法正常烧录
六、结果输出
通过SSCOM串口软件打印结果(其他串口工具也可以)
提示:注意选择对应的波特率,此次测试使用波特率为9600















 1061
1061











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









