







定义
1.假如一条边有权重,或者称为距离,要求某一个点(称为源点)到某个点的最短距离。
实现
1.无权图广度优先算法
这个算法的思路是在当前长度为i的时候,访问所有距离源点为i且之前没有被遍历的点。可以确定这些点离源点的最短距离就是i,否则之前就应该被经过了。
因此与其相邻未被经过的点的最短距离是i+1。
这个算法用距离无穷表示之前没有遍历,又用kown来表示,感觉多写了。
void Unweighted( Table T )
{
int CurrDist;
Vertex V, W;
for ( CurrDist = 0; CurrDist < NumVertex; CurrDist ++ ) {
for ( each vertex V )
if ( !T[ V ].Known && T[ V ].Dist == CurrDist ) {
T[ V ].Known = true;
for ( each W adjacent to V )
if ( T[ W ].Dist == Infinity ) {
T[ W ].Dist = CurrDist + 1;
T[ W ].Path = V;
} /* end-if Dist == Infinity */
} /* end-if !Known && Dist == CurrDist */
} /* end-for CurrDist */
}
2.对上述算法的改进,思路是将未经过的一个点入队列,每次取出一个点,将该点加入到经过的序列中,然后将与这个点相邻的且之前未经过的点距离=当前点+1并入队列。
void Unweighted( Table T )
{ /* T is initialized with the source vertex S given */
Queue Q;
Vertex V, W;
Q = CreateQueue(NumVertex );
MakeEmpty( Q );
Enqueue( S, Q ); /* Enqueue the source vertex */
while ( !IsEmpty( Q ) ) {
V = Dequeue( Q );
T[ V ].Known = true; /* not really necessary */
for ( each W adjacent to V )
if ( T[ W ].Dist == Infinity ) {
T[ W ].Dist = T[ V ].Dist + 1;
T[ W ].Path = V;
Enqueue( W, Q );
} /* end-if Dist == Infinity */
} /* end-while */
DisposeQueue( Q ); /* free memory */
}
3.带权图Dijkstra’s Algorithm
思路是选择当前距离最小的未经过的点w,加入到经过的序列中,遍历并更新与它相邻且未经过的点v的距离(本来v与源点不相邻或者距离更大,但是有一条更短的路径s->w->v)
void Dijkstra( MGraph Graph, int dist[], int path[], Vertex S )
{
int collected[MaxVertexNum];
Vertex V, W;
for ( V=0; V<Graph->Nv; V++ ) {
path[V] = -1;
dist[V] = Graph->G[S][V];
collected[V] = false;
}
dist[S] = 0;
collected[S] = true;
while (1) {
V = FindMinDist( Graph, dist, collected );/*每次找一个最小的未经过的点,经过它*/
if ( V==ERROR ) break;
collected[V] = true;
for( W=0; W<Graph->Nv; W++ )/*遍历所有与该点相邻的点*/
if ( collected[W]==false && Graph->G[V][W]<INFINITY ) {/*如果相邻,并且没有经过过,则看会不会更近一点*/
if ( dist[W]>dist[V]+Graph->G[V][W] ) {
path[W] = V;
dist[W] = dist[W]+Graph->G[V][W];
}
}
} /* end while */
}
4.带负权图
void WeightedNegative( Table T )
{ /* T is initialized by Figure 9.30 on p.303 */
Queue Q;
Vertex V, W;
Q = CreateQueue (NumVertex ); MakeEmpty( Q );
Enqueue( S, Q ); /* Enqueue the source vertex */
while ( !IsEmpty( Q ) ) {
V = Dequeue( Q );
for ( each W adjacent to V )
if ( T[ V ].Dist + Cvw < T[ W ].Dist ) {
T[ W ].Dist = T[ V ].Dist + Cvw;
T[ W ].Path = V;
if ( W is not already in Q )
Enqueue( W, Q );
} /* end-if update */
} /* end-while */
DisposeQueue( Q ); /* free memory */
}
AOE定义
AOE:(activitity in edge)边表示事件以及完成所需要的时间,结点表示完成该事件。
EC:最早达到该结点的时刻,前提是完成所有在这之前的事件。
LC:最迟达到该节点的时刻
计算EC,LC
EC是从头开始到该事件结束,所有路径之和的最大值
LC是从尾开始最小到该事件结束,总时间减去LC的最小值。
v,w松弛时间= LC[w] - EC[v] - D(v,w)
Critical Path:从头到尾,所有结点LC=EC的
题目
1.The following figure shows the AOE network of a project with 8 activities. The earliest and the latest completion times of the activity d are __, respectively.
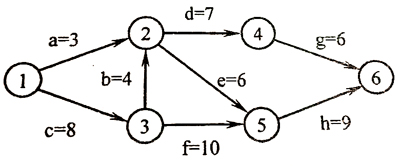
问d的LC和LE,LE是8+4+7=19,LC是27-6=21,可是答案是12/14都减了d的时长,不是很清楚。















 1515
1515











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









