






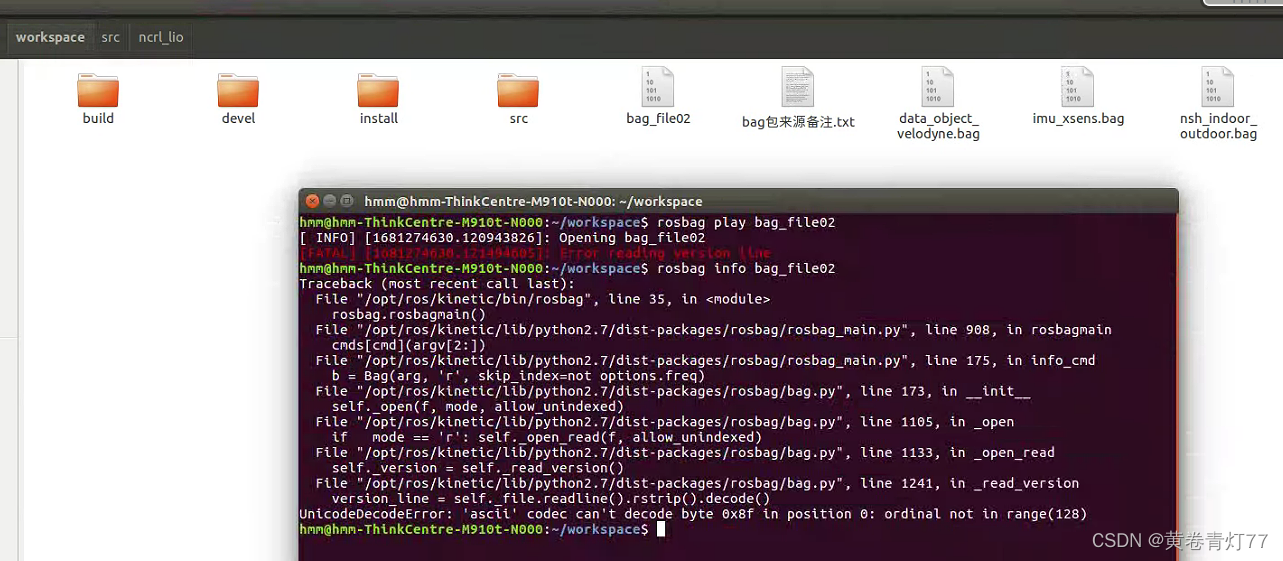
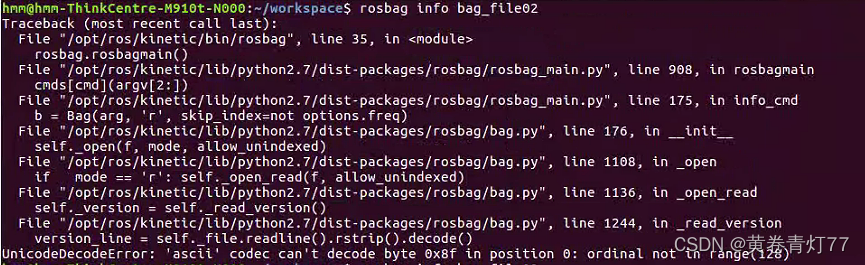
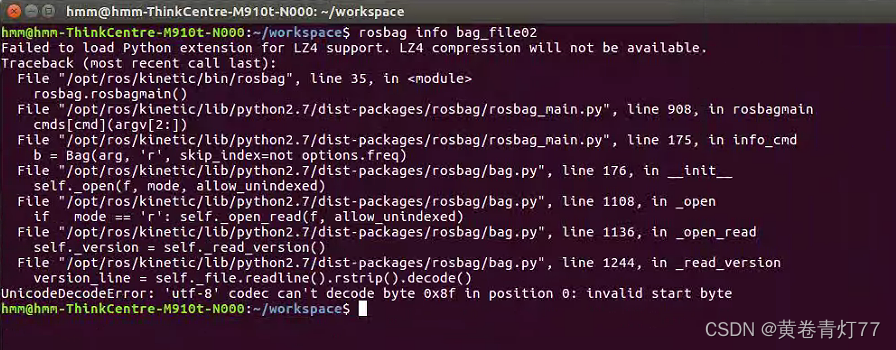
1.报错显示ascii codec can't decode byte ox8f in position 0:ordinal not in range(128)
疑问:序数词超过128,说明这个bagfile02文件能转换成ASCII码吗?
可能的原因:bagfile02是Unicode编码,而rosbag info 只能解读ASCII编码的文件
可能的解决办法:
①将bagfile02文件转换成ASCII编码
任务 :将一个用Unicode编码的二进制文件转换为用ASCII编码的文件
找到一个在线转换工具

https://www.bejson.com/transfor/unicode2ascii/
不知道该怎么用
失败
又找到一个在线转换工具,还是不知道怎么用,好像只能转换一小段的Unicode数据,bagfile02太大了,有3.42G
不过比上一个好点,会报错,没有合法的Unicode编码
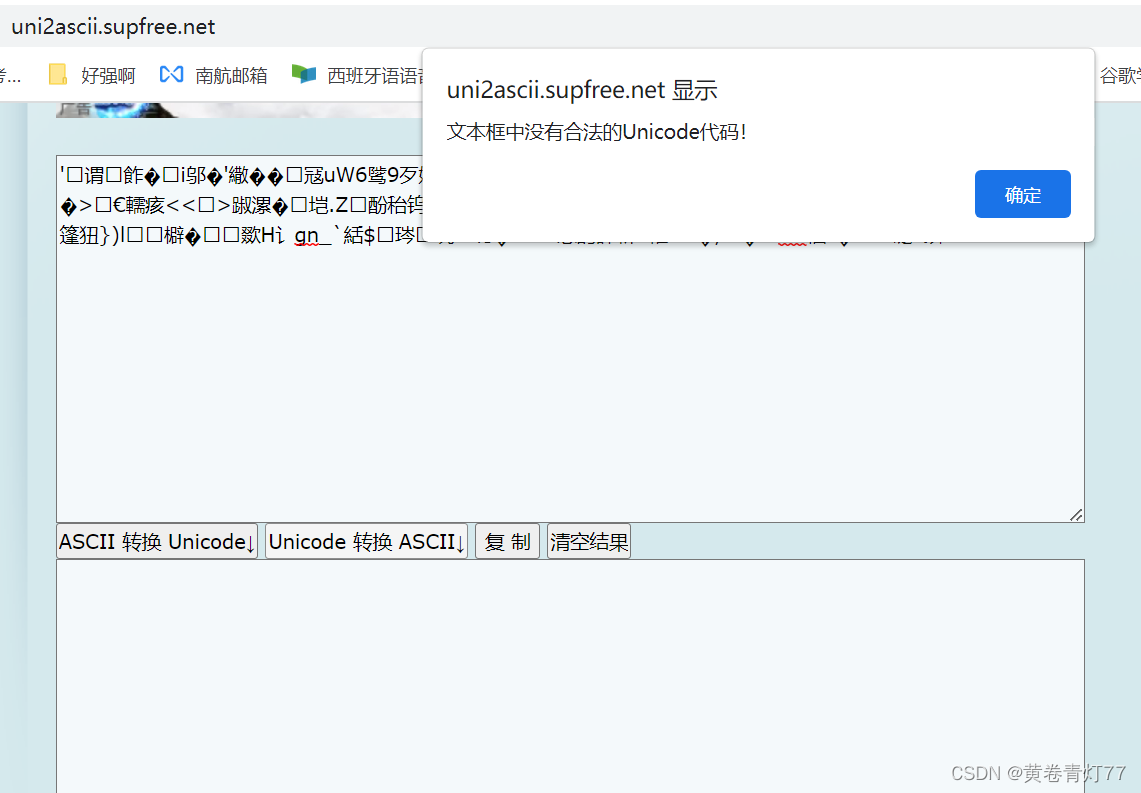

https://uni2ascii.supfree.net/
失败
第三个在线文本转换工具,一样的问题,无法直接上传数据

失败 三连跪了
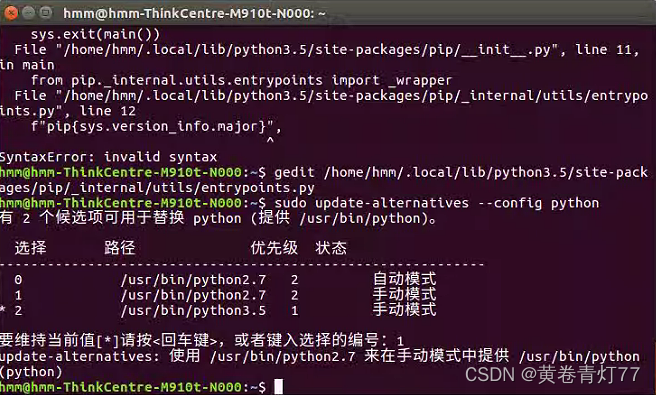
②将默认的opt/ros/kinetic/lib/python2.7变成python3.5
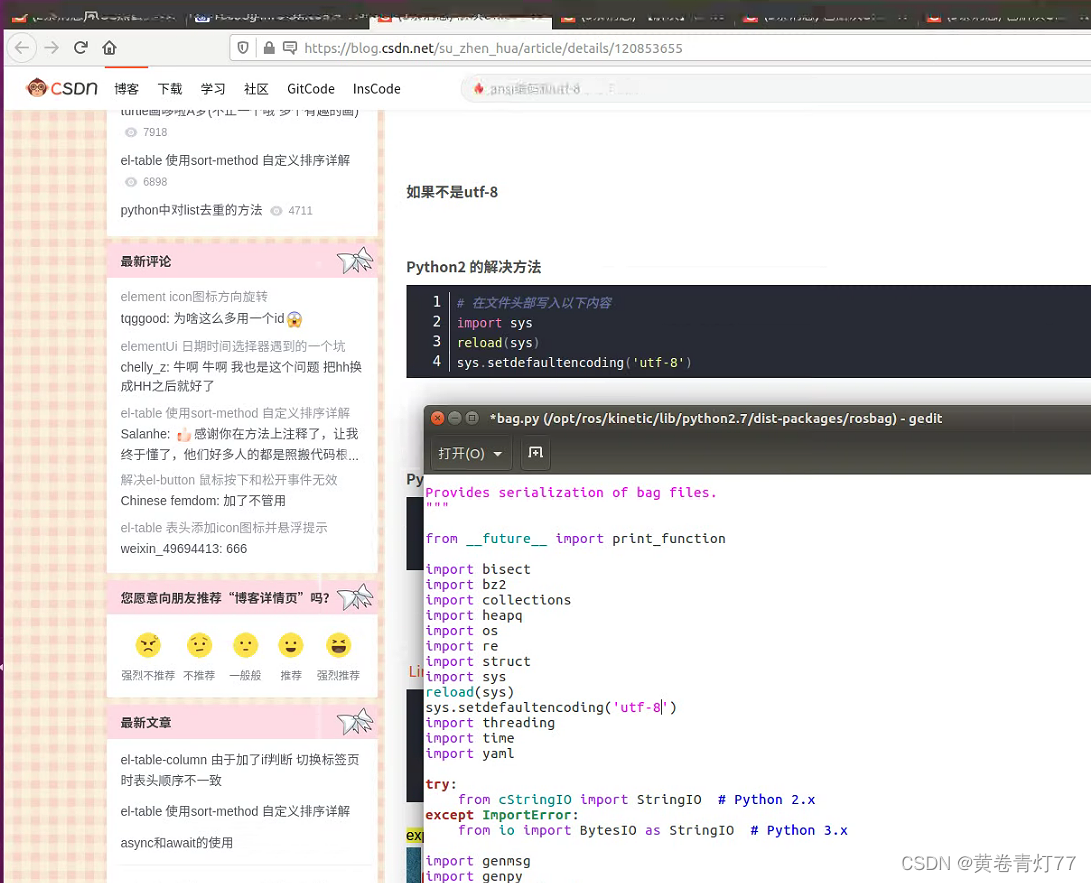
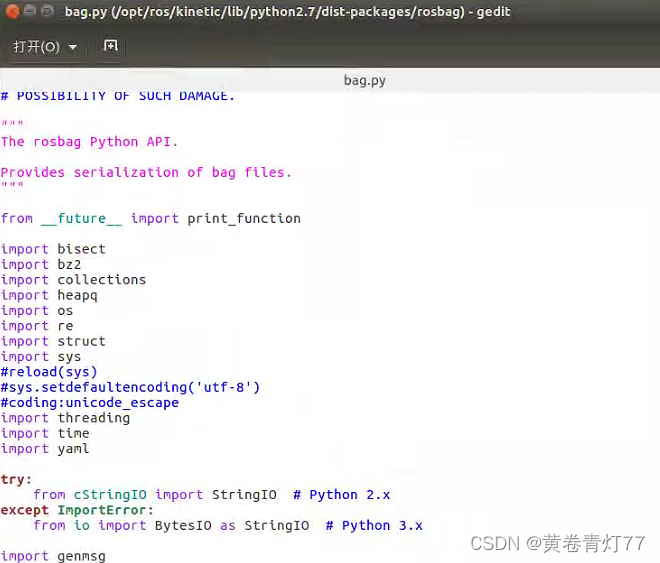
③尝试更改bag.py,按照下面的教程
https://blog.csdn.net/su_zhen_hua/article/details/120853655
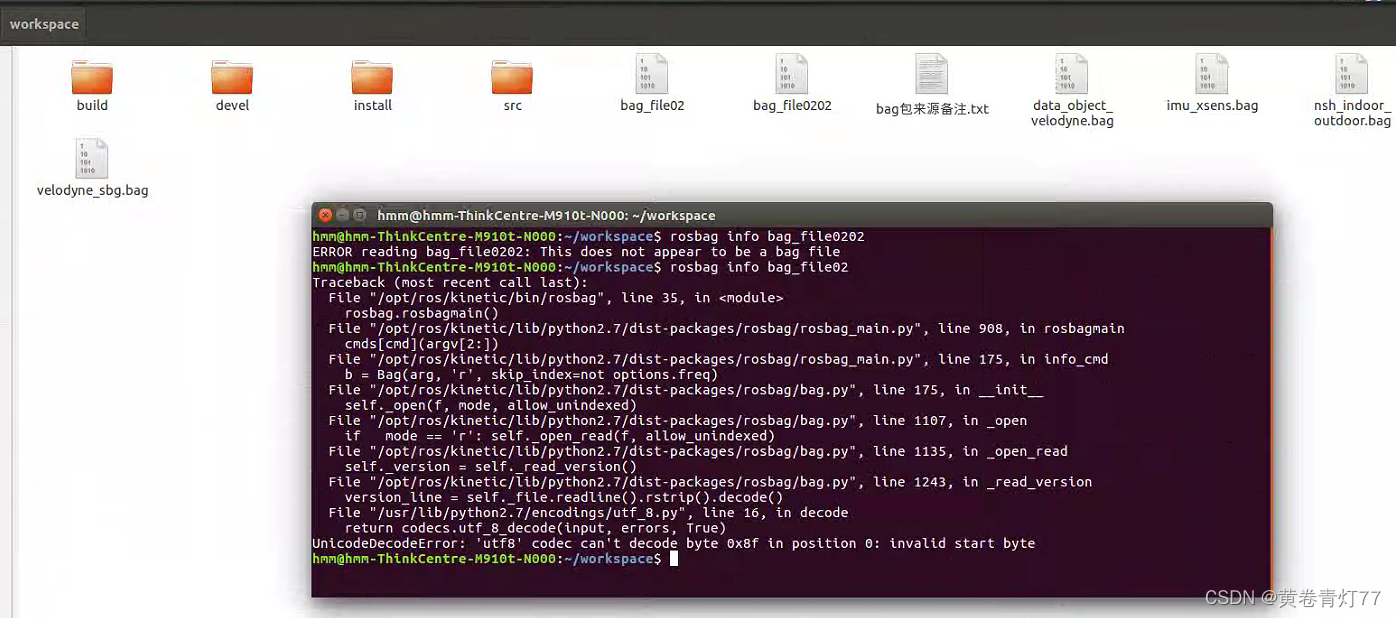
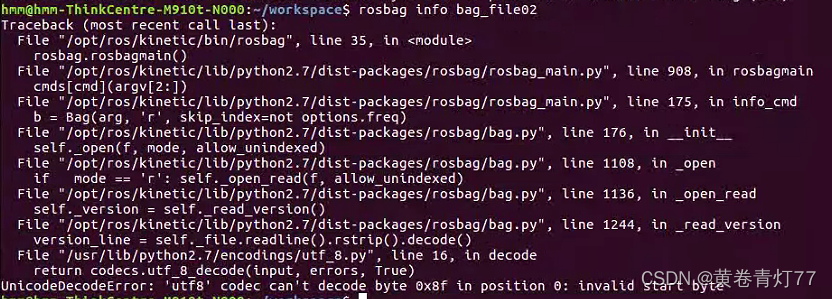
现在变成 'utf8' codec can't decode byte 0x8f in position 0:invalid start byte
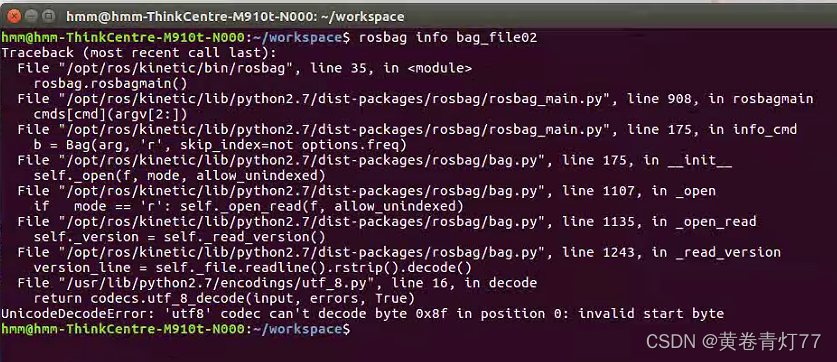
查看博文
Python——报错 UnicodeDecodeError: 'utf-8' codec can't decode byte 0xce in position 52: invalid continuation byte问题解决
https://www.cnblogs.com/huangchenggener/p/10983812.html
rosbag遍历数据出错:(unicode error) 'utf-8' codec can't decode byte 0xcd in position 31: invalid continuation byte
https://www.shuzhiduo.com/A/gVdnalLp5W/
针对ros系统记录的bag文件,可以使用python的rosbag包,按照不同起止时间和topic进行提取。
然而,有的topic可以使用rosbag读取,但是不能遍历,存在解码错误。原因应该是存在中文字符的注释, 这个可以在函数生成的temp.py中看到。
python提取bag文件时发生解码错误
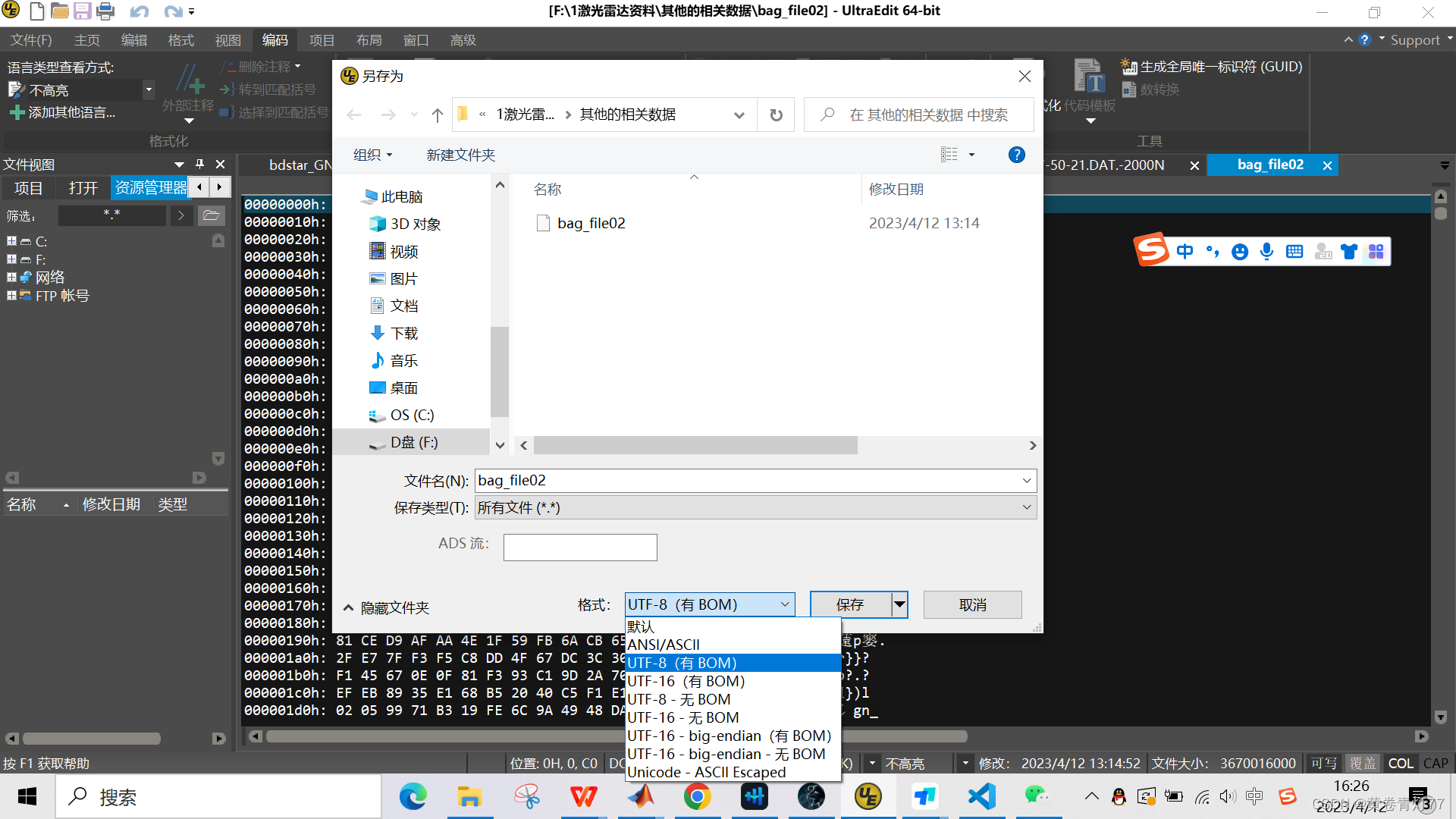
UTF-8有BOM和无BOM的区别
https://blog.csdn.net/change_any_time/article/details/79572370
这里我选择utf-8无BOM输出
原默认bagfile02
utf-8编码的bagfile0202
确实不一样了
方法一:用百度网盘传文件,开了会员,传的还是很慢,5.5MB/S,传输速度到是挺稳定的
方法二:如果把bagfile02 3.42G转换成压缩包也需要6分钟
方法三:用U盘,直接无法传过了,报错文件过大,是我的U盘的问题嘛?
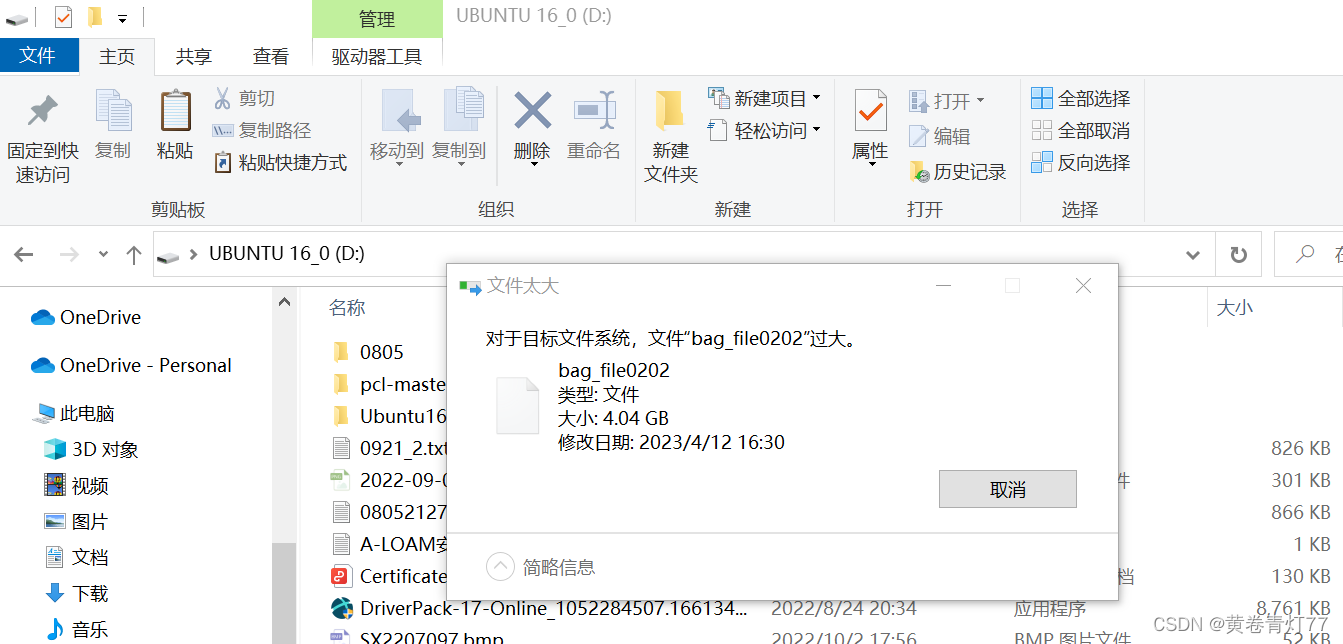
失败 四连败
问题:什么样的二进制文件是bag文件,能被rosbag info 读取呢?
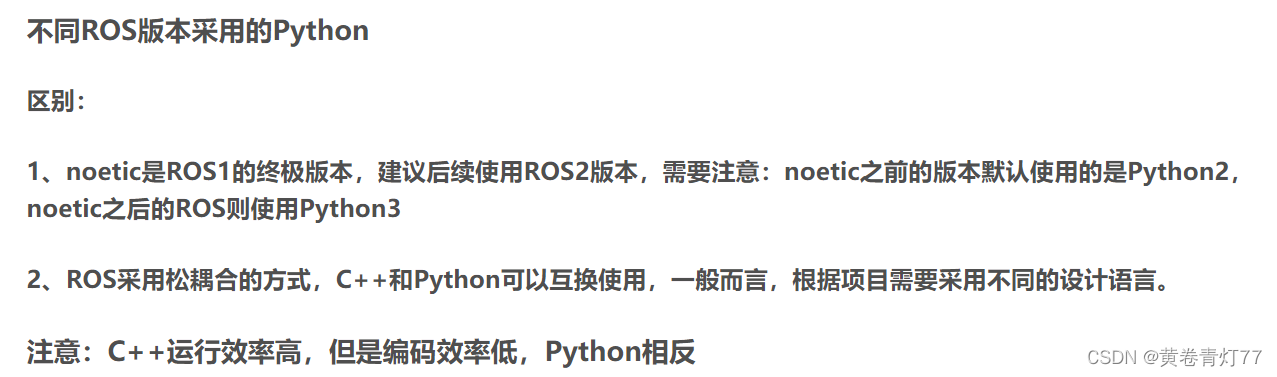
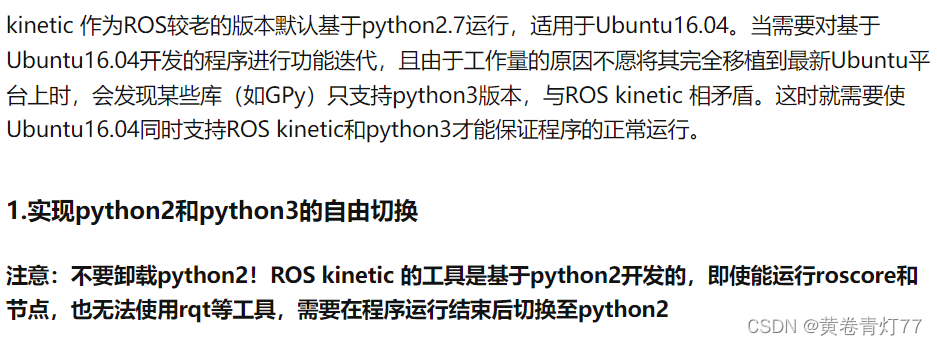
ros kinetic中的python版本
ROS不同版本采用的Python版本以及C++和Python的使用区别_ros python版本_ROS机器人学习与交流的博客-CSDN博客
ROS不同版本采用的Python版本以及C++和Python的使用区别
ros-kinetic树莓派从Python2更新到Python3报错及解决方案,成功运行_树莓派更新pip3_Dr_Zobot的博客-CSDN博客
ROS kinetic (Ubuntu 16.04)如何基于 python3 成功运行roscore
ROS kinetic (Ubuntu 16.04)如何基于 python3 成功运行roscore - 知乎
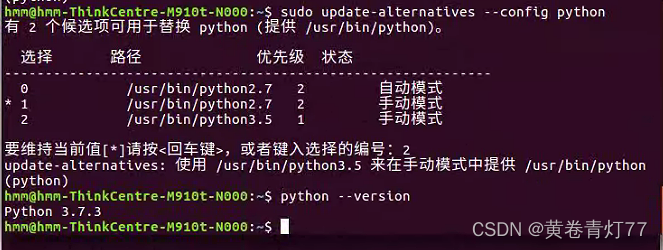
现在我默认的是python 2.7
当我把它转换成python3.5
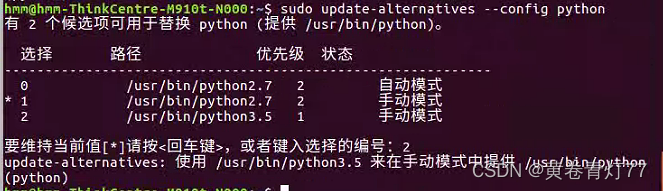
出现了
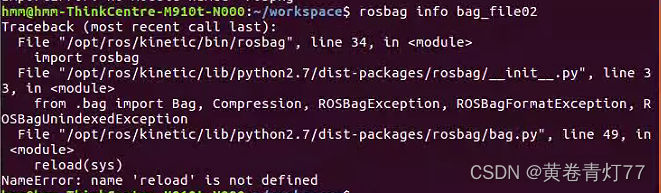
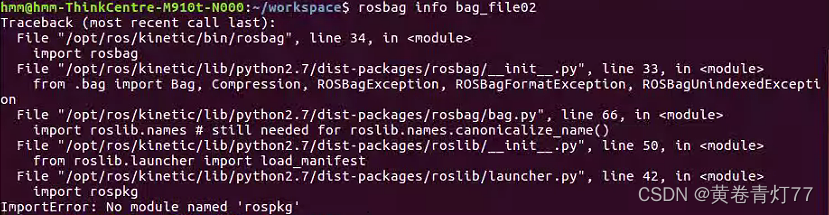
然后 我把reload那两句删了
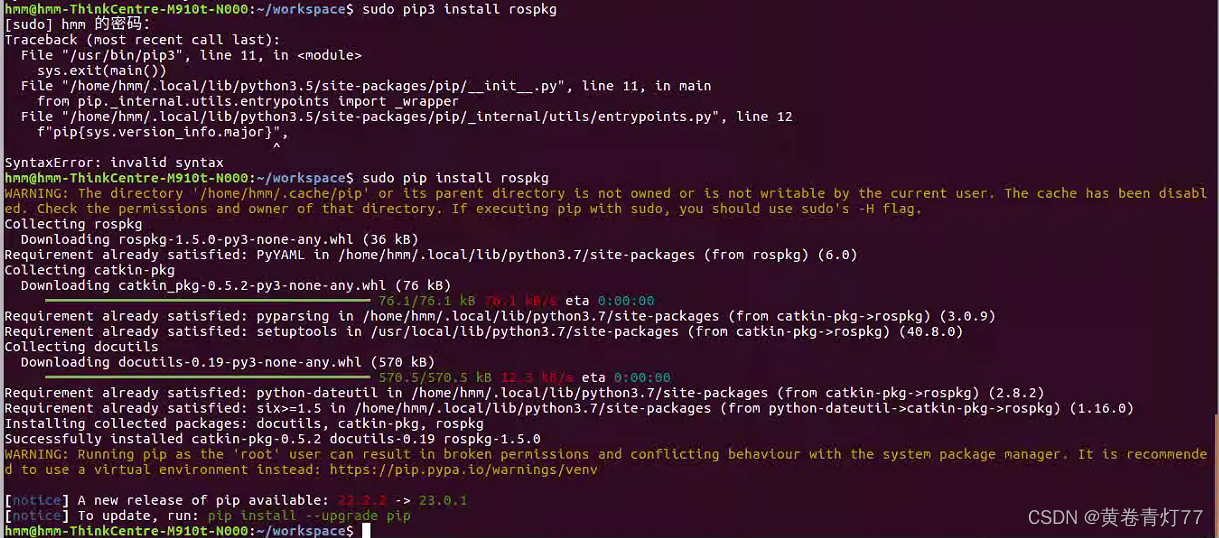
它变成了这样,报错没有rospkg
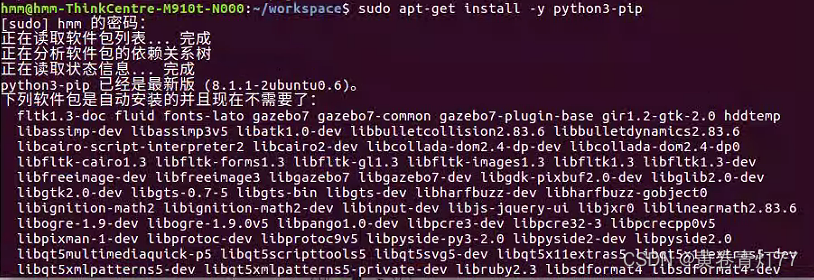
当我首先安装了python3-pipi 显示已经有了
接下来,当我企图用pip3 安装rospkg,它报错不合法的语法
问题:所以是什么的版本不对?

当我企图用pip来安装时,也出现了报错,现在的情况就是两边都不是人了
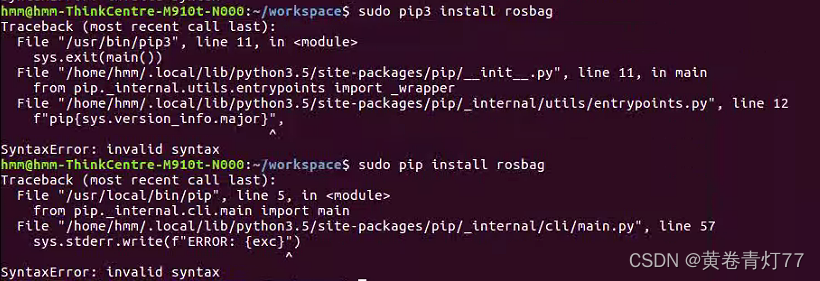
ubuntu16.04安装pip2和pip3以及解决SyntaxError: invalid syntax报错
ubuntu16.04安装pip2和pip3以及解决SyntaxError: invalid syntax报错_ubuntu安装pip2_安谦柔的博客-CSDN博客
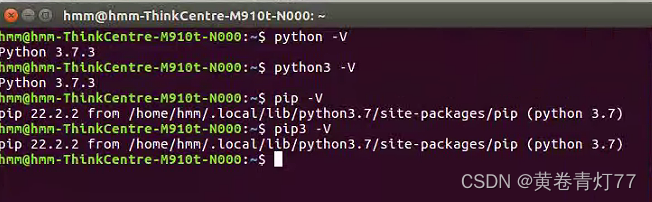
发现我的系统默认的是python3.7下的pip,并不是我刚才用update-alternatives设置的python3.5

好,我现在添加了python3.7
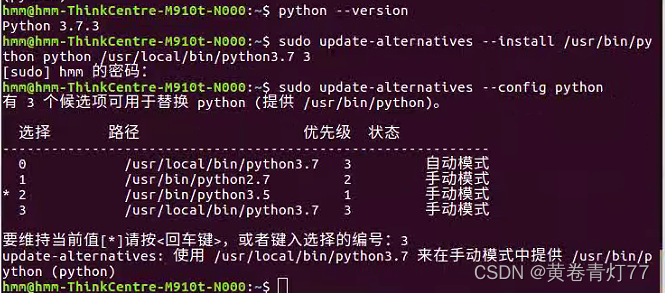
再次尝试,pip3不可以 pip可以安装,没有报错不合法的语法
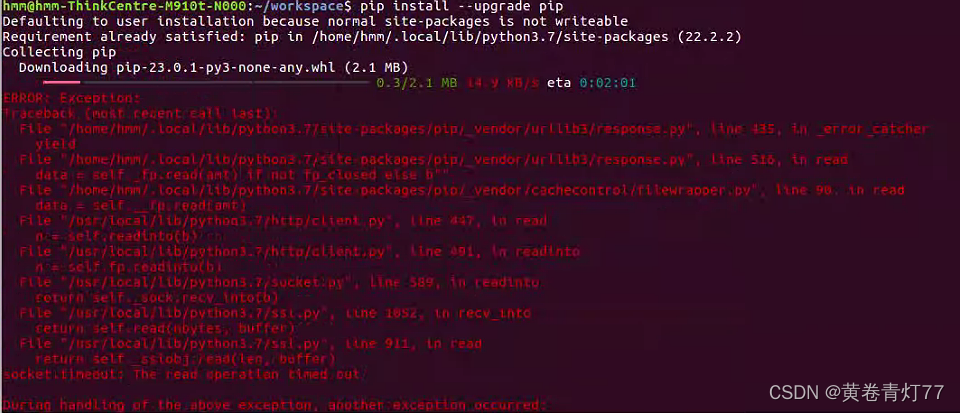
根据终端的命令,企图把pip从22.2.2更新到23.0.1,报错,那就暂时不管了
现在再一次尝试,依然报错,utf-8无法解码,不合法的起始字节,不过多了一行错误
failed to load python extension for LZ4 support
找到一个教程
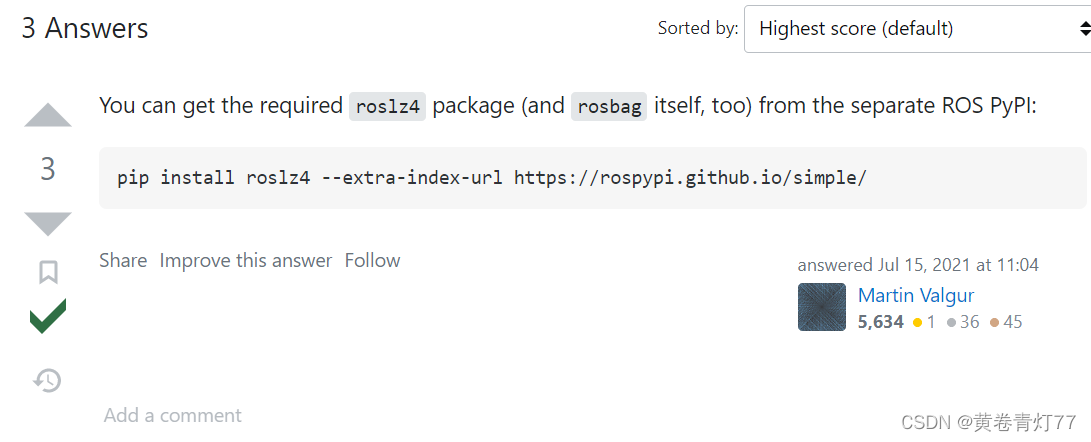
运行代码

报错,到现在,好像是我的pip都出现问题了,重新安装pip
又回到最初的起点了
我现在觉得是整个系统的原因,我需要更高版本的ros
网上找到的教程都是对应于python3的















 2629
2629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









