






前言
在工业机器视觉领域,图像质量的高低直接关乎后续检测分类等后处理的精确度。低质量的图像不仅会引发目标识别的失效、特征提取的谬误,更可能对整体系统的运行效能造成深远影响。鉴于此,本文围绕均匀性、对比度、分辨率及清晰度这四大核心要素,深入剖析了它们在塑造机器视觉图像质量中的关键作用,并相应提出了针对性的优化策略,旨在为提升工业机器视觉的准确性与可靠性提供有力支撑。
1. 均匀性(Uniformity)
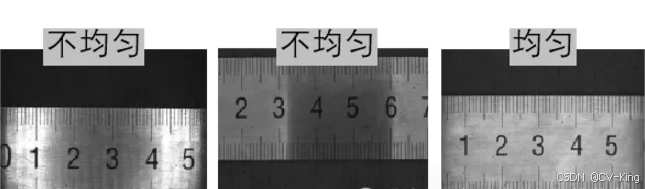
均匀性指图像中亮度分布的平衡程度,要求光线分布均匀且无明显的高光、阴影或暗区。光照不均是导致图像质量下降的常见问题,会严重干扰目标的边缘检测和区域分析。
好的图像表现
• 光照分布均匀,无突出的亮斑或阴影。
• 灰度值平滑分布,目标与背景之间形成良好的分离。
• 环境光线对图像影响较小,细节和纹理清晰可见。
差的图像表现
• 光照强度变化剧烈,存在高光区域或深色阴影。
• 背景或目标区域中部分细节由于光照不均而模糊或丢失。
• 灰度值在局部集中,导致对比度不足或细节丢失。
优化方法
• 使用漫反射光源或环形光源,减轻阴影与反光。
• 调整光源角度,使目标表面光照均匀。
• 增加扩散板或使用多光源系统,降低局部过亮或过暗的问题。
2. 对比度(Contrast)
对比度是图像目标与背景之间亮度差异的体现,反映灰度分布的动态范围。对比度的高低直接决定目标区域是否能够与背景区分开来。

好的图像表现
• 目标与背景有明显的亮度差,易于区分。
• 灰度分布均匀而广泛,层次丰富。
• 目标边缘和细节清晰,利于后续特征提取。
差的图像表现
• 目标与背景亮度接近,难以检测到目标区域。
• 灰度值范围狭窄,表现为图像整体灰蒙蒙一片,缺乏层次感。
• 对比度过高导致某些区域过曝或过暗,丢失细节。
优化方法
• 通过调整光源的波长(如红外光或蓝光)增强目标与背景的亮度差异。
• 调整相机的曝光时间和增益,适应现场光照条件。
• 应用图像增强技术,如直方图均衡化、对比度拉伸或伽马校正。
3. 分辨率(Resolution)
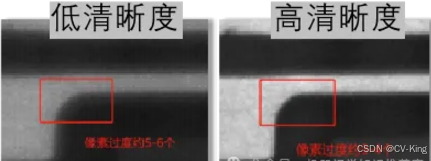
分辨率是图像中可分辨最小细节的能力,由成像设备的传感器分辨率和镜头的光学质量决定。分辨率不足或过高都会对图像质量和处理效率造成影响。

好的图像表现
• 图像分辨率适配任务需求,所有关键特征清晰可见。
• 小目标或微小特征(如孔洞、线纹)能够被准确捕捉。
• 图像细节真实无失真,无过度像素化现象。
差的图像表现
• 分辨率过低导致细节模糊,特征不可辨识。
• 像素化严重,边缘呈锯齿状,影响测量精度。
• 分辨率过高造成计算资源浪费而无实际收益。
优化方法
• 根据目标尺寸和检测精度需求选择适合的相机分辨率。
• 确保镜头解析力与相机传感器匹配,避免过采样或欠采样。
• 在无法更换硬件时,适当调整拍摄距离以提高有效分辨率。
4. 清晰度(Sharpness)
清晰度是衡量图像中目标边缘和细节锐利程度的指标,受焦距准确性、成像运动模糊和镜头光学性能等因素影响。
好的图像表现
• 图像边缘锐利,目标与背景的边界清晰。
• 细小特征(如纹理、文字)清晰可辨,且没有模糊。
• 无明显的运动模糊或离焦现象。
差的图像表现
• 图像模糊,目标细节消失,边缘呈现过渡渐变。
• 对焦不准或成像运动模糊导致无法准确提取特征。
• 过度锐化产生伪影,干扰后续处理。
优化方法
• 调整镜头的对焦位置,确保焦点精确落在目标平面上。
• 缩短曝光时间以减少运动模糊,或使用稳定装置固定拍摄设备。
• 采用去模糊和边缘增强算法进行后期处理。
四要素的综合评判标准
为了便于理解,以下表格总结了 均匀性、对比度、分辨率、清晰度 四个要素对图像质量的评判标准:
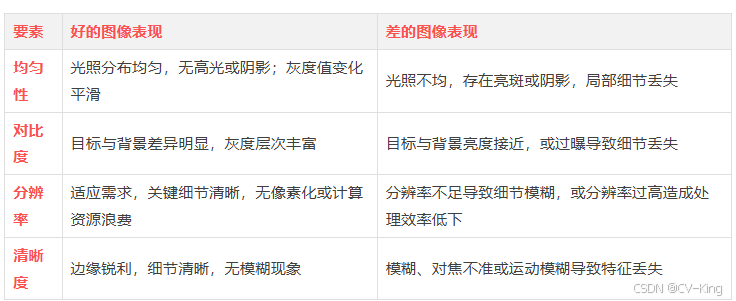
工业机器视觉应用中,图像质量的好坏由多种因素决定,其中 均匀性、对比度、分辨率、清晰度 是最关键的四个方面。高质量的图像应该在光照均匀性、目标对比度、分辨率需求和细节清晰度上达到平衡。
为确保获得优质图像,可以从以下几点入手:
- 合理布置光源,优化光照条件。
- 调整相机参数,确保对比度适中且分辨率匹配需求。
- 定期校准和优化镜头及相机焦距。
- 使用后期图像增强算法对图像进行适度优化。
通过严格控制这四个关键要素,机器视觉系统能够在目标检测、特征提取和分析中实现高精度和高效率,最终提升工业生产和检测的自动化水平。


















 123
123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









