







直流PWM – M可逆调速系统的仿真:
在主电路开环控制之下,增加了转速调节器ASR 和电流调节器 ACR ,ASR 和 ACR 都采用带输出限幅的 PI 调节器。
仿真参数:
1.主电路:
直流电源 140V
逆变桥 两个桥臂,MOSFET控制
电机
电枢额定电压 Ua = 110V
电枢额定电流 Ia = 2.9A
电枢电阻 Ra = 3.4Ω
额定转速 2400r/min
电枢电感 La = 60.4mH
转动惯量 J = 0.014kg*m^2
励磁电压、流 110V,0.5A
励磁电阻 Rf = 220Ω
定转子互感 Laf = 0.797H
额定负载转矩 Tl = 1.15N*m
2. 控制回路:
控制电压(转速给定) Uct = ±10V
转速调节器ASR Kp = 23.5, T = 0.52,输出限幅 ±10V
电流调节器ACR Kp = 35.6 T = 0.003,输出限幅 ±1V
电流反馈系数 β = 0.83
转速反馈系数 α = 0.00417
PWM 载波频率 f_carrier = 1080Hz
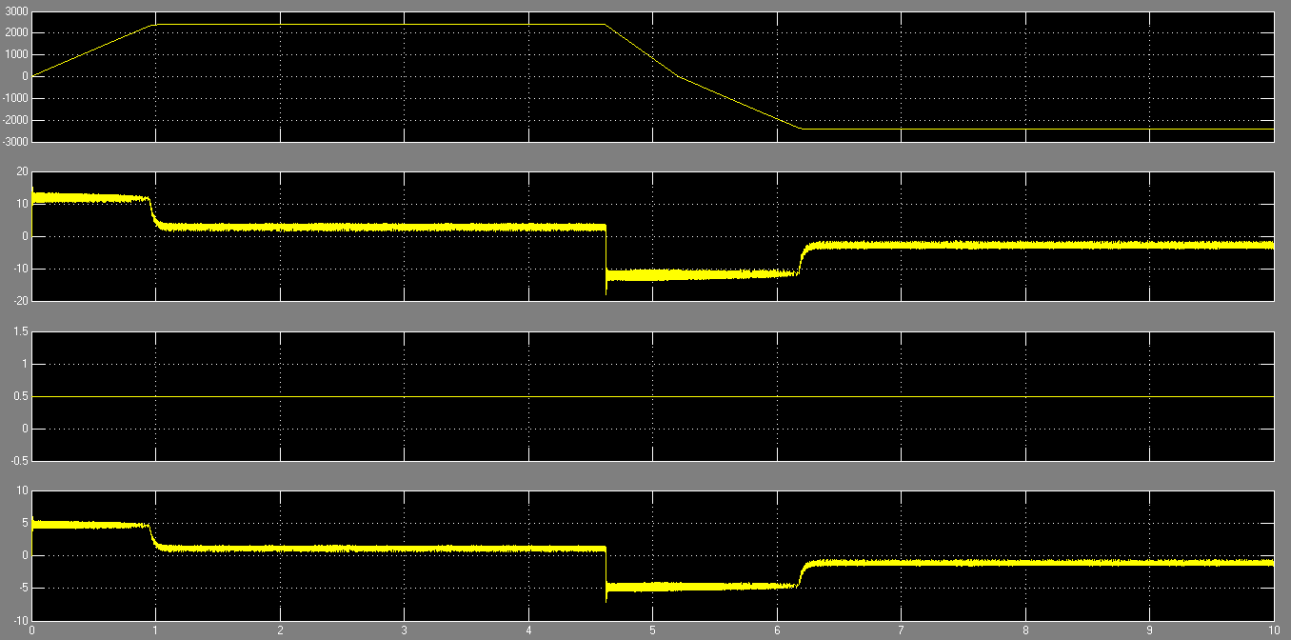
仿真波形:
开始即加额定负载,并在4.6s时发出改变转向的信号;
输出的转速,电枢电流,励磁电流,电磁转矩和电枢电压的波形:
结果分析:
1. 取电流的过载倍数 λ= 3 ,因此电动机的正转起动和制动、反转起动过程中始终保持着最大电流 12A 左右。
2. 正反转转速达到额定值 2400r/min后,电流下降为 4A 左右。
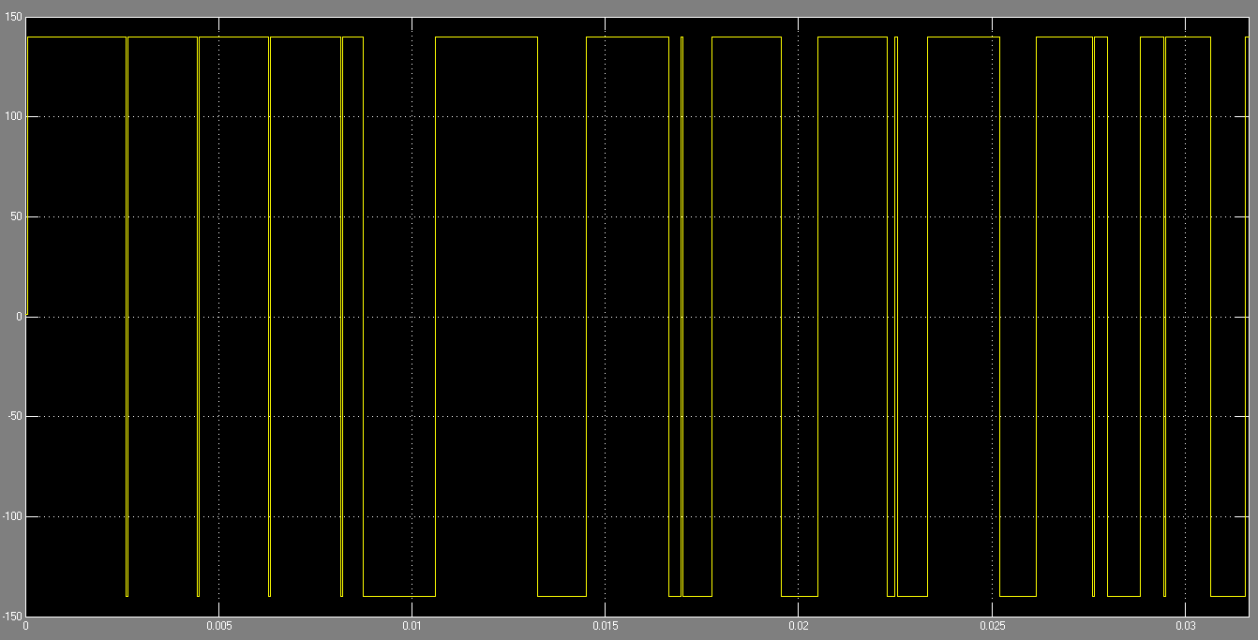
3. 由于加入了闭环,所以输出的电压波形不再是宽度均匀的PWM波,而是宽度不同的矩形波;
4. 当转速给定变化时,可以看出波形平均值也由正变负;
1_Layout:

2
3
4
















 771
771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









