







转速开环恒压频比控制的交流异步电动机调速系统仿真:
转速开环恒压频比控制是交流电机变频调速最基本的控制方式,一般变频
调速装置都带有这项功能,恒压频比的转速开环工作方式能满足大多数场合交
流电动机调速控制的要求,并且使用方便,是通用变频器的基本模式。
采用恒压频比控制,在基频以下的调速过程中可以保持电动机气隙磁通基本恒定,在相同转矩条件下电动机的转差率基本不变,所以电动机有较硬的机械特性,使电动机有较好的调速性能。
但是如果频率较低,定子阻抗压降所占比重较大,电动机难以保持气隙磁通不变,电动机的最大转矩将随频率的下降而减小。为了使电动机在低频低速时仍有较大的转矩,需要进行低频电压补偿,在低频时适当提高定子电压,使电动机仍有较大的转矩。
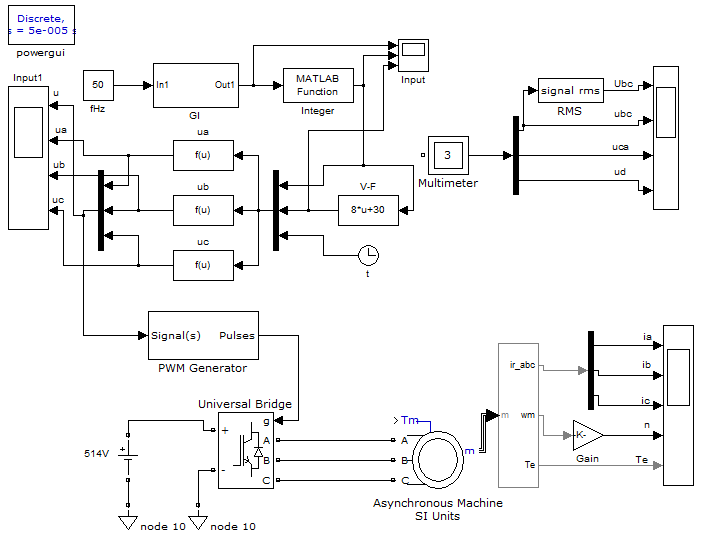
恒压频比变频调速系统原理:
系统由:
1. 升降速时间设定:
来限制电动机的升频速度,避免转速上升过快而造成电流和转矩的冲击,起软起动控制的作用。
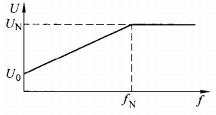
2. U/f 曲线:
根据频率确定相应的电压,以保持压频比不变( U/f= 常数),并在低频时进行适当的电压补偿。
3. SPWM 调制和驱动:
根据频率和电压要求产生按正弦脉宽调制的驱动信号,控制逆变器以实现电动机的变压变频调速。
主回路包括:
直流电源 514V
IGBT组成的桥式逆变电路 三个桥臂
异步电机:
额定转速 1487r/min
额定电压 400V
额定频率 50Hz
控制部分包括:
频率给定(转速) 50Hz
给定积分器GI 放大倍数1e4;
取整函数Round 将频率取为整数;
V – F 曲线 根据频率确定相应的电压值;
Un 电动机额定电压 400V
fn 额定频率 50Hz
U0 初始电压补偿值
Mux:
将计算后给定的电压U,频率f,时间t汇入,形成一维向量:
X = [ u(1), u(2), u(3) ]
分别为U,f,t;
函数模块ua,ub,uc:
产生三相调制信号ua,ub,uc,用于产生触发脉冲
实际产生PWM输入只能取±1,所以约为U(1)/400
PWM发生器:
根据三相调制电压信号,产生逆变器驱动脉冲,经逆变器得到频
率和幅值可调的三相电压,使交流电动机按给定要求起动和运行。
取载波频率1500Hz.
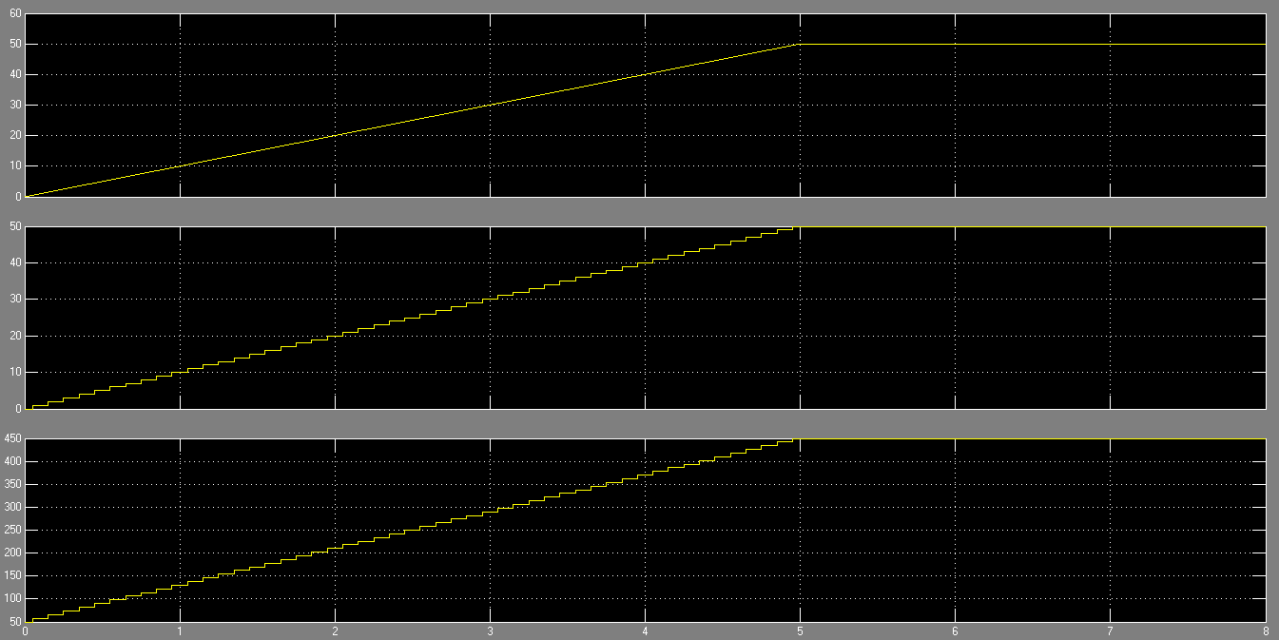
仿真波形结果:( 给定频率50Hz,启动时间5s ):
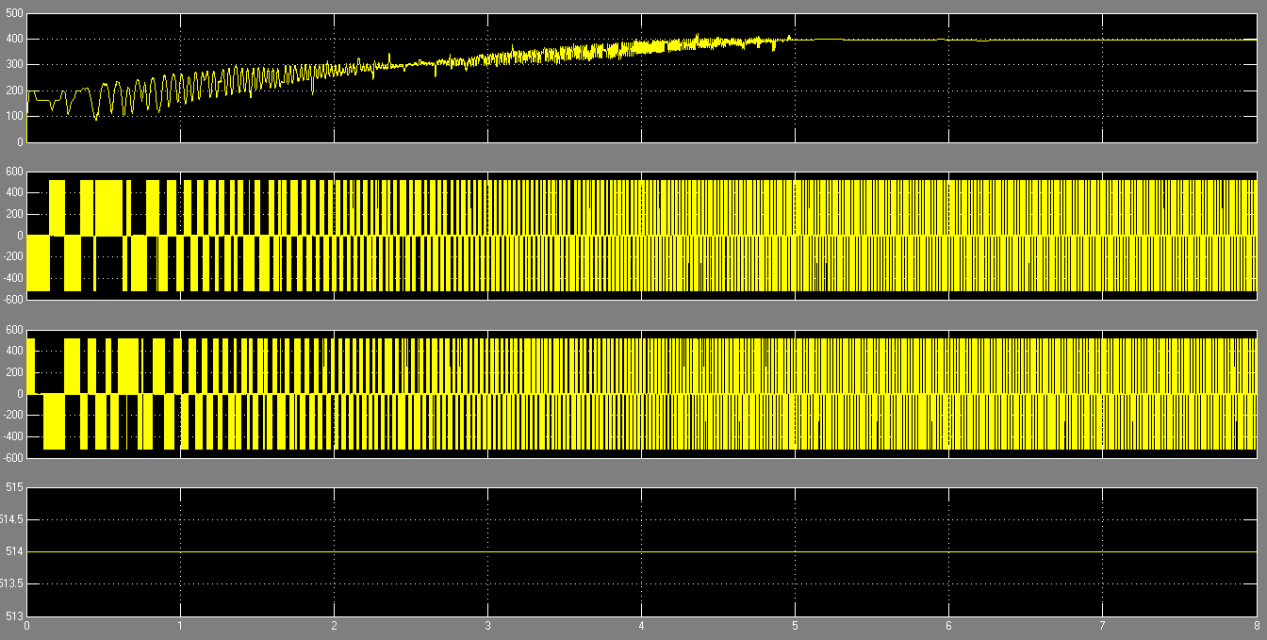
输入给定波形: GI调节下频率上升、化为整数后和给定电压上升:
1_Layout :
2_幅频特性和补偿值函数:
3_给定积分环节输出:
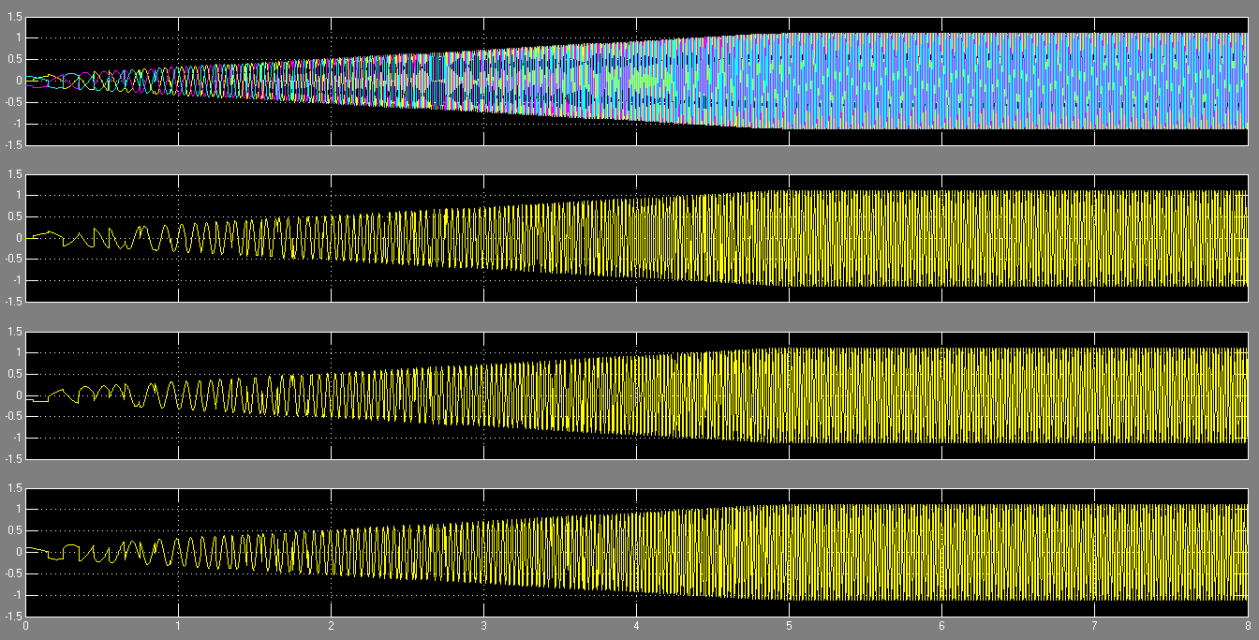
4_PWM的载波输入信号:( Ua,Ub,Uc )
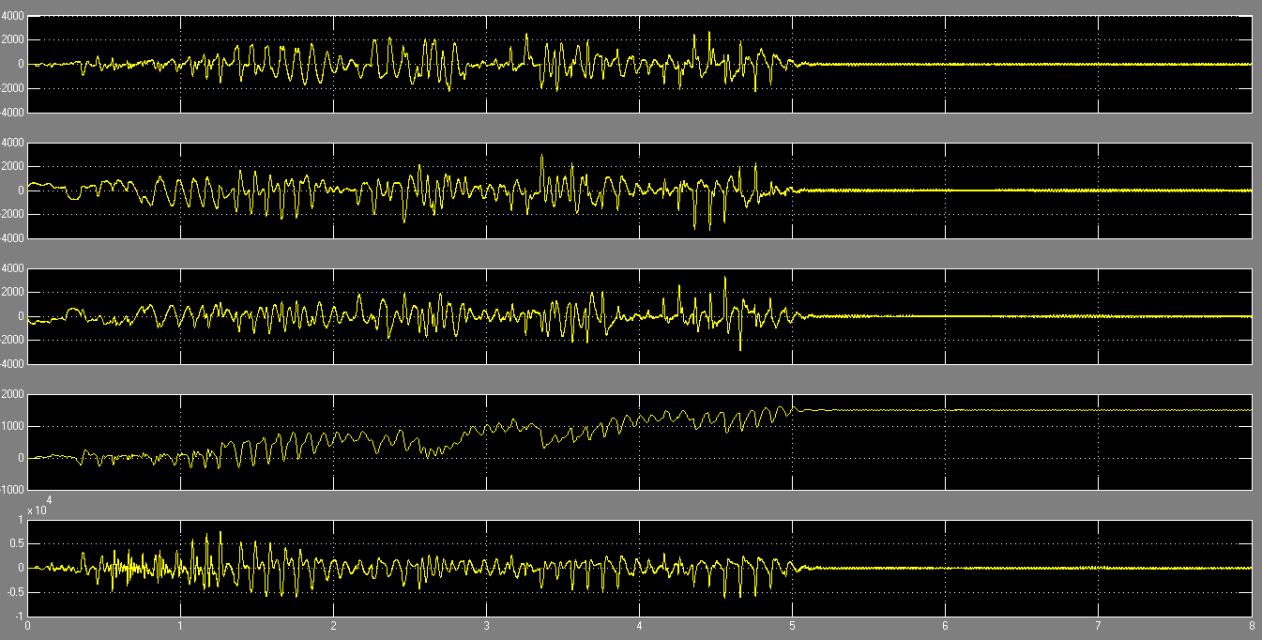
5_电动机三相电流,转速,电磁转矩:
6_逆变器输出线电压平均值,Ubc,Uca瞬时值:
四、结果分析:
电动机电压基本按 U- f 曲线的设定上升,但是起动中转速和转矩的波动很大。
转速和转矩产生较大波动的原因:
从逆变器输出电压的波形中可以看到,输出电压的频率变化呈现出不规则,电压频率不是均匀地上升,中间部分时段电压波形的周期变大,频率减小。
在频率变化的边界上,正弦调制信号和转速都发生了畸变,这是因为频率变化的时刻不一定是发生在调制信号一个完整周期的末尾,在调制正弦信号一周期尚未结束时,频率发生了变化就可能使下一周期信号的前半周期变宽或变窄,使相应的一周期频率减小或增加。进一步比较频率变化时刻的三相电压波形,这时的三相电压的相序也可能异常,出现瞬时的负相序,电动机也产生了负的转矩,从而使电动机的转矩和转速发生急剧波动。
延长起动时间,波动的情况可以减小,但是波动还是存在的。
如果起动时间设定过小,在正弦一周内发生多次频率的变化,还可以出现增频现象,使逆变器输出频率超过设定频率 (50Hz),电动机转速出现超调。因此采用等时间间隔的升频过程,都难以完全避免输出电压周期不规则的现象,工程上称之为"跳频"现象。

















 2412
2412

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









