







原创 | 文 BFT机器人
01
研究内容
论文的主要研究内容是基于平面双关节机器人的相机姿态分析和评估。研究旨在分析相机的位置调整和一般数据分析,讨论人体姿势的平衡、关节运动的控制以及相机速率的估计和控制。
通过有限相机技术的应用,有效解决平面摄影的问题,并给出了摄影和运动的测量结果。该研究的意义在于解决平面相机运动中的人体姿势平衡问题,并通过支持关节扭矩的控制输入实现人体运动。
- 平面双关节机器人的相机位置调整
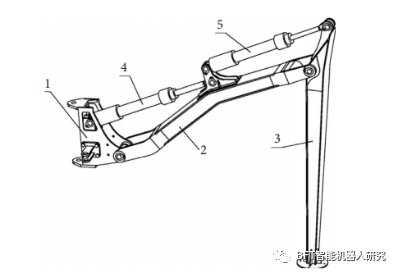
图一:平面双关节机器人相机通用位姿
原创 | 文 BFT机器人
论文的主要研究内容是基于平面双关节机器人的相机姿态分析和评估。研究旨在分析相机的位置调整和一般数据分析,讨论人体姿势的平衡、关节运动的控制以及相机速率的估计和控制。
通过有限相机技术的应用,有效解决平面摄影的问题,并给出了摄影和运动的测量结果。该研究的意义在于解决平面相机运动中的人体姿势平衡问题,并通过支持关节扭矩的控制输入实现人体运动。
- 平面双关节机器人的相机位置调整
图一:平面双关节机器人相机通用位姿

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























